一种基于YOLOv6的桥梁病害巡检方法及系统
本发明涉及桥梁病害检测,具体而言,尤其涉及一种基于yolov6的桥梁病害巡检方法及系统。
背景技术:
1、桥梁是交通的枢纽,关系到社会发展的命脉,长期使用难免会有各种各样的损伤造成安全隐患。桥梁定期巡检能够系统地掌握其使用状态,及时发现桥梁表面和内部的早期病害并及时进行养护和加固措施,对于节约桥梁养护成本、保障桥梁通行安全具有重要意义。
2、目前,国内外传统桥梁病害检测方式以人工检测为主,常采用检测方法有自视检查或望远镜、专用桥检车检测通过机械臂的控制以工作台载人进行人工作业等。常规人工检测虽易于实施,但对于较长或结构繁琐的桥梁来说会出现检测精度低、耗时长、受主观因素影响较大、存在安全隐患且容易造成漏检等诸多问题。专用桥检车检测稳定性好、检测方便,但只能获取桥梁表面的病害信息,无法检测桥墩、桥梁侧面及拉索部位。无人机作为一种体积小、独立性高、灵活度强的设备用于桥梁检测中具有检测成本低、灵活高效、安全性高、不影响桥面交通正常运行且不受桥梁跨度、高度及桥型的影响等优点,无人机航测技术逐渐被应用于交通基础设施的病害检测过程中,它可以基于人工远程控制快速地完成对物体现有表面信息的图像采集,对桥梁的日常养护和检测提供了极大的便利。现有无人机桥梁检测只是简单估计模糊参数对图像进行复原,对病害细节会有部分损失,不利于后续识别。此外,当前大多数方法都容易受树叶、光影干扰,无法准确识别病害,因此在无人机检测桥梁病害识别技术时实践得到的结果并不理想。
3、无人机桥梁病害巡检中的路径规划是指综合考虑无人机、环境以及目标任务等多种因素规划任务起点至终点的最优路径规划。无人机飞行路径规划手段的智能化、自动化十分有必要,常用的路径规划算法有a*算法、d*算法、模糊逻辑法、蚁群算法、遗传算法、rrt算法等。当前在实际任务中常采用的人工规划易操作,程序简单,但面对复杂飞行环境、多变气象等制约因素是无法及时做出相应决策,飞行距离有限无法满足要求。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种基于yolov6的桥梁病害巡检方法及系统,本发明采用基于无人机智能机场的桥梁病害巡检系统,实现桥梁病害检测结果的实时标定和显示,并可用于一定范围桥梁病害的定期巡检。解决了传统桥梁检测成本高、效率低、影响交通正常运行等问题
2、本发明采用的技术手段如下:
3、一种基于yolov6的桥梁病害巡检方法,包括:
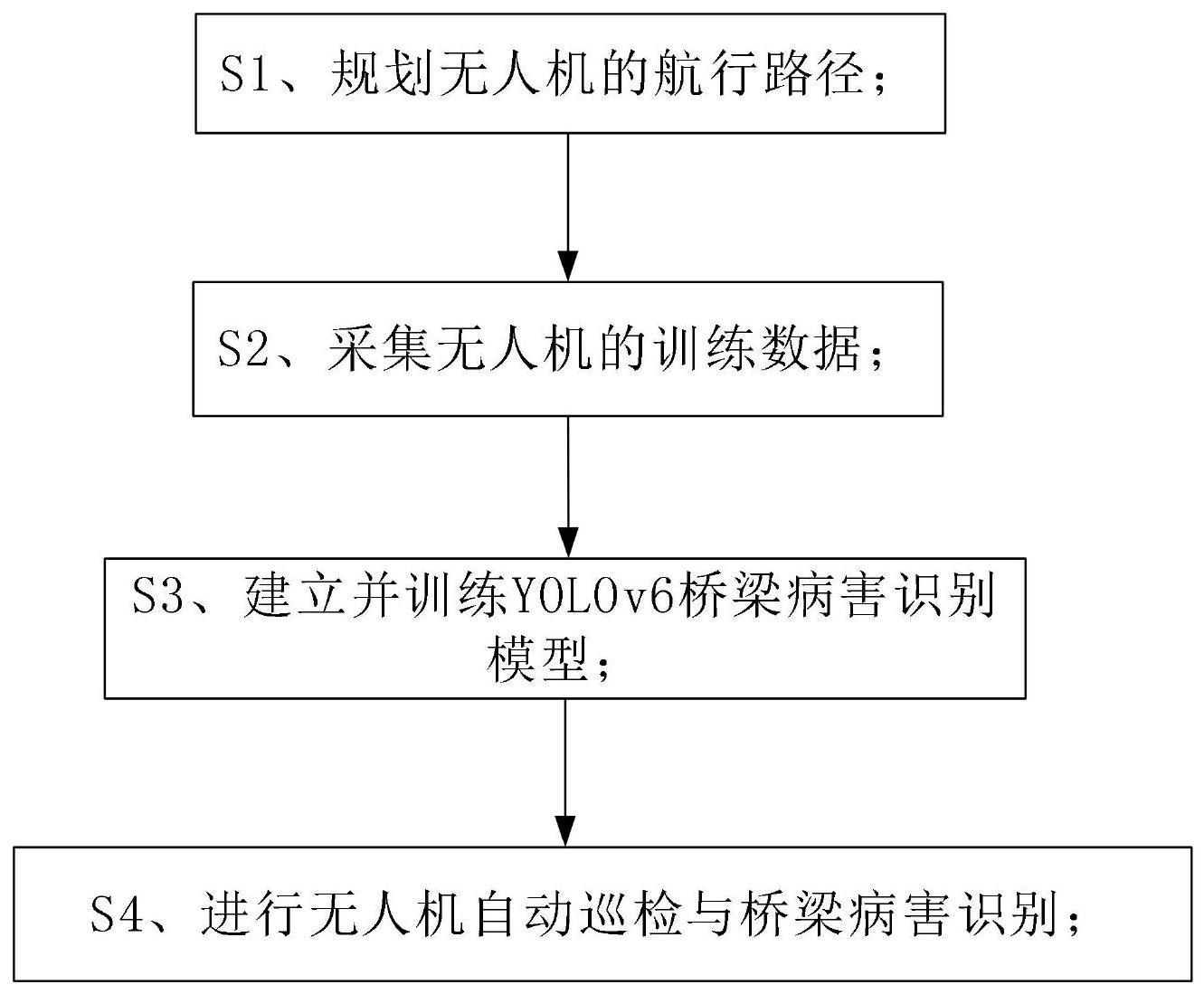
4、s1、规划无人机的航行路径;
5、s11、制定桥梁重点检测部位;
6、s12、获取桥梁重点检测部位对应的地球坐标的分布信息;
7、s13、采用无人机路径规划算法规划出无人机初步航行路线,无人机基于初步航行路线进行试飞得到航行姿态信息;
8、s14、采用无人机路径规划算法将无人机所处点位的地球坐标位置和航行姿态信息与实际信息匹配、对比、修复替换后,确认出无人机航行最终路线;
9、s2、采集无人机的训练数据;
10、s21、控制无人机按航行最终路线进行飞行,无人机在飞行过程中拍摄视频数据实时回传至巡检子系统,无人机在飞行过程中拍摄高分辨率图片数据并在降落后回传至巡检子系统;
11、s22、至巡检子系统将视频与图片整合成训练数据集,并将数据集发送至中央管理系统;
12、s3、建立并训练yolov6桥梁病害识别模型;
13、s31、中央管理系统对训练数据集中视频数据按帧率划分为高分辨率图像数据;使用数据集标注工具对每一张高清晰度图片中所有种类桥梁病害进行标注并分发不同种桥梁病害以相应病害名称标签,以得到桥梁病害在单张图片中的形状大小、相应位置和分布情况,得到桥梁病害数据库;
14、s32、将桥梁病害数据库划分为训练集和测试集;
15、s33、建立yolov6桥梁病害识别模型,将桥梁病害数据集中的训练集输入至yolov6桥梁病害识别模型中进行训练,将测试集输入至训练后的yolov6桥梁病害识别模型中测试模型的识别效果,获得最终的桥梁病害识别模型;
16、s4、进行无人机自动巡检与桥梁病害识别;
17、s41、采用无人机路径规划算法规划目标桥梁的无人机的航行路径;
18、s42、无人机按s41中的航行路径飞行并获取目标桥梁的视频与图片;
19、s43、将视频与图片数据发送至最终的桥梁病害识别模型中,最终的桥梁病害识别模型对视频与图片数据进行桥梁病害的实时标定并在原视频和图片中直接显示。
20、进一步地,s13中,所述航行姿态信息包括对应lbs位置信息、航行方位和俯仰角信息。
21、进一步地,s31中,所述桥梁病害数据库包括病害的名称、统计时间、统计类型和图例。
22、进一步地,所述桥梁病害的种类包括混凝土表面病害、钢筋表面锈蚀病害和其他部件病害。
23、进一步地,所述yolov6桥梁病害识别模型的量化方法包括训练后量化和量化感知训练;所述yolov6桥梁病害识别模型包括骨干网络、颈部和头部。
24、进一步地,无人机航行路径的规划方法包括运动规划、轨迹优化、导航和定位。
25、进一步地,所述无人机路径规划算法为a*算法、d*算法、模糊逻辑法、蚁群算法、遗传算法、rrt算法中的一种。
26、本发明还提供了一种基于yolov6的桥梁病害巡检系统,用以实现上述任一项基于yolov6的桥梁病害巡检方法,包括:
27、巡检子系统;所述巡检子系统包括无人机智能机场,所述无人机智能机场接收中央管理系统的控制指令并根据控制指令控制无人机飞行;
28、中央管理系统;所述中央管理系统向无人机智能机场发送控制指令,所述中央管理系统接收巡检子系统发送的视频和图片数据;
29、自动识别系统;所述自动识别系统采用yolov6桥梁病害识别模型对视频数据进行桥梁病害的实时标定并在原视频和图片中直接显示。
30、本发明还提供了一种存储介质,所述存储介质包括存储的程序,其中,所述程序运行时,执行上述任一项基于yolov6的桥梁病害巡检方法。
31、本发明还提供了一种电子装置,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器通过所述计算机程序运行执行上述任一项基于yolov6的桥梁病害巡检方法。
32、较现有技术相比,本发明具有以下优点:
33、本发明为了解决传统桥梁检测成本高、效率低、影响交通正常运行等问题,采用基于无人机智能机场的桥梁病害巡检系统,实现桥梁病害检测结果的实时标定和显示,并可用于一定范围桥梁病害的定期巡检。
34、本发明为了解决传统桥梁病害识别技术精度低、耗时长、鲁棒性低等问题,采用基于人工智能的桥梁病害图像自动识别技术yolov6模型进行桥梁病害自动检测工作,通过与前述巡检系统的交互,大幅度提高识别效率与识别精度;
35、本发明为了解决传统无人机飞行航迹规划中无法对突发状况做出变化,制约因素较多等问题,提出无人机航线智能规划技术,缩短规划时间且系统可对无人机航线实时跟踪。
- 还没有人留言评论。精彩留言会获得点赞!