一种基于视频图像分析的拖车作业安全在线监测系统的制作方法
本发明涉及拖车作业安全监测领域,涉及到一种基于视频图像分析的拖车作业安全在线监测系统。
背景技术:
1、拖车又称为道路清障车,主要用于道路故障车辆、城市违章车辆和抢险救援等,拖车作业涉及到人、车、路等多方面的安全因素,在整个作业过程中需要确保拖车操作安全,避免意外事故的发生。因此,对拖车作业安全进行监测具有现实意义。
2、现有的拖车作业安全监测方法主要通过拖车操作人员依靠自身的经验、专业技能和应急处理能力,排查和处理拖车作业过程中的安全隐患,主观性比较强,没有对拖车作业整个过程中存在的各细节点进行数据化的深入分析,导致安全隐患排查结果的准确性和可靠性不足,在实际操作中可能难以发现潜在隐患或者隐患排查存在遗漏,存在着一些不足:1、现有方法没有对拖车的停靠位置进行细化分析,如拖车停靠时相对于事故车的方向和距离,若拖车停靠的方向不符合要求,即拖车与事故车不在同一水平线上,会使事故车的车轮不能精准落在拖车平板上对应的泊车区域,容易使事故车在拖运过程中从拖车平板滑落;若拖车停靠的距离不符合要求,拖车停靠的距离太近,使得拖车的平板无法伸展或者伸展时刮蹭事故车,拖车停靠的距离太远,增加拖车作业过程中的倒车距离,进而增加拖车作业的工作量,降低作业效率。
3、2、现有方法没有分析拖车执行机构初始状态对应的适宜参数并进行设置,如平板下滑距离和托臂倾斜角度,平板下滑距离过长,容易与事故车的车胎摩擦,损伤事故车的车胎,平板下滑距离过短,增加后续将事故车牵引到拖车平板的工作量;托臂倾斜角度过大,拖车平板越陡峭,增加将事故车牵引到拖车平板的阻力,托臂倾斜角度过小,拖车平板越平缓,增加拖车平板承受的压力,容易损坏拖车平板。
4、3、现有方法没有对拖车托举的准备工作进行细化分析,如拖车托举前期准备工作中执行结构的基本参数和拖车托举后期准备工作中拖车的倒车距离和牵引绳的固定等,如果拖车托举准备工作不符合要求或者不充分,容易给拖车托举过程埋下安全隐患,甚至引发安全事故。
5、4、现有方法没有对拖车托举过程进行全面性监测,如平板的上滑速度、托臂倾斜角度变化速度和托臂收缩速度,速度太快,给拖车造成较大冲击,损坏拖车,速度太慢,容易使事故车从拖车平板上溜车,给事故车造成二次损伤。
技术实现思路
1、针对上述问题,本发明提出了一种基于视频图像分析的拖车作业安全在线监测系统,实现对拖车作业安全监测的功能。
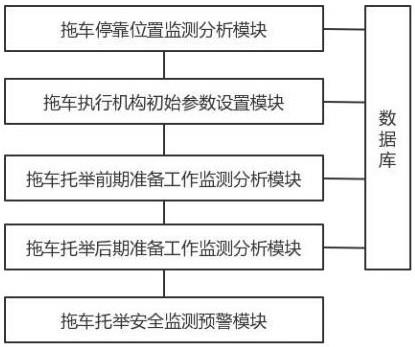
2、本发明解决其技术问题采用的技术方案是:本发明提供一种基于视频图像分析的拖车作业安全在线监测系统,包括:拖车停靠位置监测分析模块:用于获取事故车的位置信息和拖车的位置信息,分析拖车停靠的方向吻合系数和距离吻合系数,判断拖车停靠是否规范,并对拖车停靠位置进行调整。
3、拖车执行机构初始参数设置模块:用于获取事故车的特征信息,分析拖车执行机构初始状态对应的基本参数,其中基本参数包括托臂倾斜角度、托臂长度和平板下滑距离,进一步对拖车的执行机构进行调控。
4、拖车托举前期准备工作监测分析模块:用于监测拖车托举前期准备工作中执行机构的基本参数,判断拖车托举前期准备工作是否符合要求,并进行调整。
5、拖车托举后期准备工作监测分析模块:用于获取拖车托举后期准备工作中拖车的倒车距离符合系数和牵引绳固定符合系数,判断拖车托举后期准备工作是否符合要求,并进行调整。
6、拖车托举安全监测预警模块:用于获取拖车托举过程中平板的上滑速度、托臂倾斜角度变化速度和托臂收缩速度,判断拖车托举过程是否存在安全隐患,并进行预警。
7、数据库:用于存储拖车的动态空间模型、事故车特征角各角度对应的拖车执行机构初始状态时托臂倾斜角度和托臂长度、拖车托举前期准备工作中事故车靠近拖车一侧的车轮在拖车平板上的适宜驶过距离、拖车托举时事故车在拖车平板的适宜位置和事故车中各条牵引绳的适宜位置和适宜长度范围。
8、在上述实施例的基础上,所述拖车停靠位置监测分析模块的分析过程包括:获取事故车的各角度实景图像,构建事故车的空间模型,获取事故车第一侧车轮组中第一车轮与第二车轮的中心线所成的直线,将其记为事故车第一侧车轮组的方向指示线,同理,根据事故车第一侧车轮组的方向指示线的分析方法,获取事故车第二侧车轮组的方向指示线。
9、获取拖车平板表面中车辆第一车轮组对应泊车区域和车辆第二车轮组对应泊车区域的中轴线,将其记为拖车平板表面中车辆第一车轮组和车辆第二车轮组的泊车基准线。
10、获取事故车第一侧车轮组方向指示线与拖车平板表面中车辆第一车轮组泊车基准线的夹角,将其记为,并获取事故车第二侧车轮组方向指示线与拖车平板表面中车辆第二车轮组泊车基准线的夹角,将其记为。
11、通过分析公式得到拖车停靠的方向吻合系数,其中表示预设的拖车停靠的方向吻合系数的修正因子。
12、在上述实施例的基础上,所述拖车停靠位置监测分析模块的分析过程还包括:根据数据库中存储的拖车的动态空间模型,获取拖车平板完全展开时平板伸出拖车尾部边缘线的水平距离,将其记为,通过分析公式得到拖车与事故车之间的适宜距离,其中表示预设的拖车平板操作空间对应的水平距离,表示预设的拖车与事故车之间的距离的补偿量。
13、获取拖车与事故车之间的实际距离,将其记为。
14、通过分析公式得到拖车停靠的距离吻合系数,其中表示预设的拖车停靠的距离吻合系数的修正因子,表示预设的拖车停靠距离允许偏差。
15、通过分析公式得到拖车的停靠规范指数,其中表示自然常数,分别表示预设的方向吻合系数和距离吻合系数的权值。
16、将拖车的停靠规范指数与预设的停靠规范指数阈值进行比较,若拖车的停靠规范指数小于预设的停靠规范指数阈值,则拖车停靠不规范,并对拖车停靠位置进行调整。
17、在上述实施例的基础上,所述拖车执行机构初始参数设置模块的具体过程为:获取事故车第一侧车轮组和第二侧车轮组的侧视图像。
18、在事故车第一侧车轮组的侧视图像中标出第二车轮落地点与事故车尾端边缘点,并将第二车轮落地点与事故车尾端边缘点进行连接,得到事故车的第一指向参考线,获取事故车的第一指向参考线与水平基准线之间的夹角,将其记为事故车的第一特征角。
19、同理,对事故车第二侧车轮组的侧视图像进行分析,得到事故车的第二特征角。
20、对事故车的第一特征角和第二特征角的角度进行平均值计算,得到事故车的特征角的角度。
21、提取数据库中存储的事故车特征角各角度对应的拖车执行机构初始状态时托臂倾斜角度和托臂长度,根据事故车的特征角的角度,筛选得到拖车执行机构初始状态对应的托臂倾斜角度和托臂长度。
22、获取拖车的侧视图像,得到拖车执行机构中托臂为初始状态时平板末端与事故车第二车轮落地点之间的距离,将其记为拖车执行机构初始状态对应的平板下滑距离。
23、在上述实施例的基础上,所述拖车托举前期准备工作监测分析模块的分析过程包括:获取拖车托举前期准备工作中执行机构的理想平板下滑距离、理想托臂倾斜角度和理想托臂长度,将其分别记为、。
24、获取拖车托举前期准备工作中执行机构的平板下滑距离、托臂倾斜角度和托臂长度,将其记为、。
25、在上述实施例的基础上,所述拖车托举前期准备工作监测分析模块的分析过程还包括:通过分析公式得到拖车的托举前期准备工作符合系数,其中分别表示预设的拖车托举前期准备工作中执行机构的平板下滑距离、托臂倾斜角度和托臂长度的偏差阈值。
26、根据拖车的托举前期准备工作符合系数,判断拖车托举前期准备工作是否符合要求,并进行调整。
27、在上述实施例的基础上,所述拖车托举后期准备工作监测分析模块的分析过程包括:获取拖车托举后期准备工作中拖车的适宜倒车距离,将其记为。
28、获取拖车托举后期准备工作中拖车的倒车距离,将其记为。
29、通过分析公式得到拖车托举后期准备工作中拖车的倒车距离符合系数,其中表示预设的拖车倒车距离单位偏差对应的影响因子。
30、获取拖车托举后期准备工作中事故车中各条牵引绳的位置和长度,分析拖车托举后期准备工作中事故车中固定符合标准和固定不符合标准的牵引绳数量,将其分别记为。
31、通过分析公式得到拖车托举后期准备工作中拖车的牵引绳固定符合系数。
32、在上述实施例的基础上,所述拖车托举后期准备工作监测分析模块的分析过程还包括:通过分析公式得到拖车的托举后期准备工作符合指数,其中分别表示预设的倒车距离符合系数和牵引绳固定符合系数的阈值,分别表示预设的倒车距离符合系数和牵引绳固定符合系数的权值。
33、根据拖车的托举后期准备工作符合指数,判断拖车托举后期准备工作是否符合要求,并进行调整。
34、在上述实施例的基础上,所述拖车托举安全监测预警模块的分析过程为:获取拖车托举过程中平板的上滑速度、托臂倾斜角度变化速度和托臂收缩速度,将其分别记为。
35、获取拖车托举过程中参考平板上滑速度、参考托臂倾斜角度变化速度和参考托臂收缩速度,并分别表示为。
36、通过分析公式得到拖车托举过程的安全系数,其中分别表示预设的拖车托举过程中平板的上滑速度、托臂倾斜角度变化速度和托臂收缩速度的偏差阈值。
37、将拖车托举过程的安全系数与预设的安全系数阈值进行比较,若拖车托举过程的安全系数小于预设的安全系数阈值,则拖车托举过程存在安全隐患,进行预警,并通知拖车作业员。
38、相对于现有技术,本发明所述的一种基于视频图像分析的拖车作业安全在线监测系统以下有益效果:1、本发明通过获取事故车和拖车的位置信息,分析拖车停靠的方向吻合系数和距离吻合系数,判断拖车停靠是否规范并进行调整,确保拖车停靠的方向和位置更加精准,为拖车作业安全提供保障,降低拖车作业的工作难度和任务量。
39、2、本发明通过获取事故车的特征信息,分析拖车执行机构初始状态对应的托臂倾斜角度、托臂长度和平板下滑距离,并对拖车的执行机构进行调控,保证拖车作业的顺利进行,并为拖车作业安全提供保障。
40、3、本发明通过监测拖车托举前期准备工作中执行机构的基本参数和拖车托举后期准备工作中拖车的倒车距离符合系数和牵引绳固定符合系数,判断拖车托举的准备工作是否符合要求,并进行调整,保证拖车托举准备工作符合要求,防止给拖车托举过程埋下安全隐患。
41、4、本发明通过获取拖车托举过程中平板的上滑速度、托臂倾斜角度变化速度和托臂收缩速度,判断拖车托举过程是否存在安全隐患,并进行预警,防止速度太快给拖车造成较大冲击、损坏拖车或者速度太慢使事故车从拖车平板上溜车,给事故车造成二次损伤。
- 还没有人留言评论。精彩留言会获得点赞!