远程触觉感知装置及方法和基于远程触觉感知的人机交互方法
本发明涉及触感模拟再现,具体地说是一种远程触觉感知装置及方法和基于远程触觉感知的人机交互方法。
背景技术:
1、触感感觉远程交互技术在当今蓬勃发展的通讯技术中的缺位使得迄今为止的远程通讯仍停留在视觉与听觉的感受。诸如计算机、移动手机等生活中常用的人机交互设备往往只能提供视觉上的刺激,而人们在与外界环境交互中更倾向于感受触觉上的反馈。因此,未来的人机交互设备将更加倾向于附加触感反馈系统以增加虚拟或远程操作场景中交互的沉浸感。
2、目前国际上对触感感觉复现的研究倾向于使用各类智能新材料、新结构以及新的电子元件等。中国专利cn113672089a公开了一种纺织品触感复现装置及方法,其利用柔软感复现基体、电致伸缩薄膜、蓬松感复现基体、柔性加热片及柔性制冷片和导电纤维综合复现纺织品的各项触感,并对复现的各项触感进行实时监测与对应的真实触感对比后将误差修正。中国专利cn115421587a公开了一种休闲鞋触感复现装置及方法,其通过绵软感复现基体、松紧感复现部分、回弹感复现基体和清爽感复现部分综合复现休闲鞋的各项触感,并且将各项触感特征值同时传递给虚拟现实系统,使得用户在虚拟环境中能同时感受到试穿时的触觉、视觉,有现场触觉与视觉感受的体验。
3、上述方法虽然能复现出较多维度的触感,但是存在复现精度不高、复现装置体积庞大、不易维护等缺点,并且没有复现出材料干爽湿润感、刺痛柔和感这两种触感,因此不能准确复现出各个维度的触感。且现有技术以触感复现技术为主,还缺少远程触觉感知以及基于远程触觉感知的远程操作人机交互的方法。
技术实现思路
1、有鉴于此,本发明针对上述现有技术存在的无法准确复现触感以及缺少远程触觉感知的技术问题,提供了一种远程触觉感知装置及方法和基于远程触觉感知的人机交互方法。
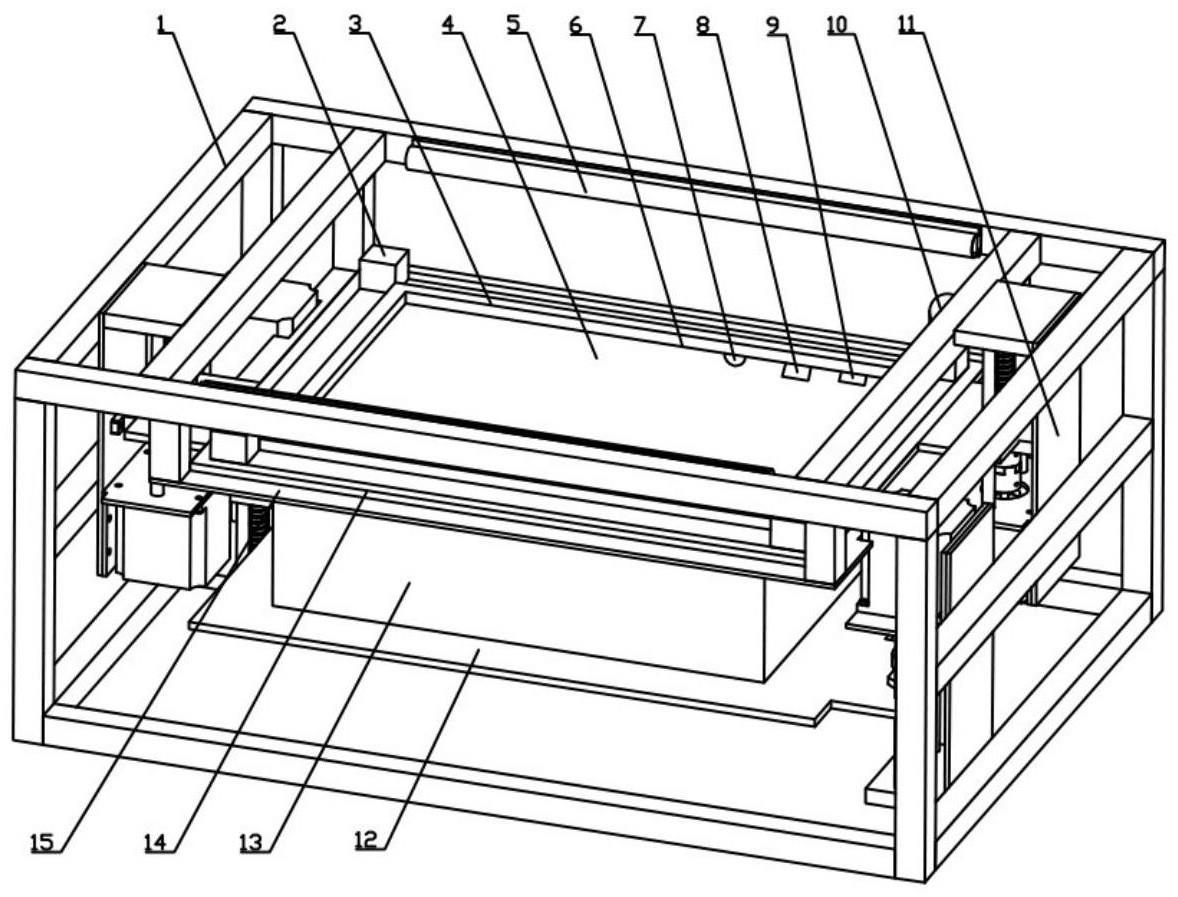
2、本发明的技术解决方案是,一种远程触觉感知装置,包括包括多层复合式柔性感知体、驱动组件和支撑组件。所述多层复合式柔性感知体、所述驱动组件均设置于所述支撑组件上。
3、所述多层复合式柔性感知体在垂直方向上分为四层,所述多层复合式柔性感知体第一层由亚毫米级压电陶瓷薄膜致动器、柔性柱状电极、光感液晶聚合物网状涂层、各向异性导电胶、光纤传感器和环氧树脂软胶构成,在所述多层复合式柔性感知体表面设有湿度传感器,通过多个所述亚毫米级压电陶瓷薄膜致动器的阵列布局和纵向厚度变化复现微观光滑粗糙感;通过多个所述柔性柱状电极的阵列布局和施加电流来复现刺痛柔和感;通过所述光感液晶聚合物网状涂层反复可逆地释放和吸收液体来复现干爽湿润感;
4、所述多层复合式柔性感知体第二层由微型帕尔贴元件矩阵和环氧树脂软胶组成,在所述多层复合式柔性感知体表面设有温度传感器,通过改变流经所述微型帕尔贴元件矩阵电流的极性和大小来复现温暖凉爽感;
5、所述多层复合式柔性感知体第三层由柔性电极层、聚氨酯记忆膜层和隔热绝缘层组成,在所述多层复合式柔性感知体上方设有高精度超声波测距传感器,通过所述聚氨酯记忆膜层厚度的变化复现柔软硬挺感;
6、所述多层复合式柔性感知体第四层为蓬松紧密感复现组件,所述蓬松紧密感复现组件由镍钛合金形状记忆纤维柱、弹性聚合物蜂窝网格和温度传感器组成,所述镍钛合金形状记忆纤维柱置于所述弹性聚合物蜂窝网格中,通过镍钛合金形状记忆纤维柱在温度升高或降低后产生的不同大小的纵向拉伸或收缩变化量,从而复现蓬松紧密感。
7、所述支撑组件由框架、下压板、底板和支撑板组成,所述下压板以及支撑板可以压紧所述多层复合式柔性感知体,防止手指在所述多层复合式柔性感知体表面滑动时所述多层复合式柔性感知体产生滑移。
8、所述驱动组件由步进电机、联轴器、轴承座、丝杆、导柱和法兰组成,通过所述步进电机带动所述丝杆转动,从而带动下压板与底板竖直运动。
9、可选的,所述多层复合式柔性感知体四角设有音圈驱动器,所述音圈驱动器有振动膜片的一端靠近所述多层复合式柔性感知体表面,并通过改变所述音圈驱动器发出振动的频率和幅值,从而改变所述多层复合式柔性感知体表面的宏观光滑粗糙感。并且在触摸区边缘设置了红外触摸框,所述红外触摸框能够实时获取触摸时的手指位置,并将通过计算得到的输出信号并发送至各触觉复现执行器,从而将触觉反馈复现在所述多层复合式柔性感知体的相应位置上。
10、可选的,所述远程触觉感知装置,其特征在于在所述多层复合式柔性感知体四角设有音圈驱动器,所述音圈驱动器有振动膜片的一端靠近所述多层复合式柔性感知体表面,并通过改变所述音圈驱动器发出振动的频率和幅值,从而改变所述多层复合式柔性感知体表面的宏观光滑粗糙感;在多层复合式柔性感知体边缘设置了红外触摸框,所述红外触摸框能够实时获取触摸时的手指位置,并将通过计算得到的输出信号发送至多层复合式柔性感知体各层中的触觉复现元件,从而将远程物体触觉复现在所述多层复合式柔性感知体的相应位置上。
11、可选的,所述多层复合式柔性感知体第一层内,所述亚毫米级压电陶瓷薄膜致动器具有高压电系数,能够在宽动态频率范围(1 hz - 1khz)内产生高分辨率的触觉刺激,且被摆放成棋盘式,亚毫米级压电陶瓷薄膜致动器使用所述各向异性导电胶的热压结合工艺固定在所述环氧树脂软胶上,通过逆压电效应在所述亚毫米级压电陶瓷薄膜致动器上产生纵向的微小位移,来复现物体的微观光滑粗糙感;所述多层复合式柔性感知体表面设有光纤传感器,通过采集其中心波长数据以监测所述多层复合式柔性感知体的表面状态变化;在四个为一单元的所述亚毫米级压电陶瓷薄膜致动器中心均设有所述柔性柱状电极,通过在所述柔性柱状电极施加微小电流后,手指在所述多层复合式柔性感知体表面滑动会感受到电刺激,从而复现刺痛柔和感;所述亚毫米级压电陶瓷薄膜致动器与所述柔性柱状电极间存在间隙,均由所述环氧树脂软胶填充并低于多层复合式柔性感知体表层一段微小距离;在所述环氧树脂软胶和多层复合式柔性感知体表层之间的微小间隙中,涂有所述光感液晶聚合物网状涂层,并且在所述框架上装有紫外led灯,可以发射365nm的紫外光;所述光感液晶聚合物网状涂层在紫外光照射下可以反复可逆地释放和吸收液体,通过控制紫外光照时长,从而复现干爽湿润感;所述多层复合式柔性感知体表面设有所述湿度传感器,用于采集湿度数据以监测多层复合式柔性感知体表面的湿度状态。
12、可选的,所述多层复合式柔性感知体第二层内,所述微型帕尔贴元件矩阵呈网格状分布,微型帕尔贴元件之间的空隙和上下表面均由所述环氧树脂软胶填充覆盖;基于帕尔贴效应,通过控制流经所述微型帕尔贴元件矩阵电流的极性和电流量大小,使得其产生冷热变化从而复现温暖凉爽感;所述多层复合式柔性感知体表面设置有所述温度传感器,用于监测多层复合式柔性感知体表面温度值,以调节所述微型帕尔贴元件矩阵的工作状态。
13、可选的,所述多层复合式柔性感知体第三层内,两层所述柔性电极层分别覆盖在所述聚氨酯记忆膜层的上下两面从而构成介电弹性体;当在两层所述柔性电极层间施加电压时,介电弹性体中的所述聚氨酯记忆膜层柔软度发生变化,从而复现柔软硬挺感;在所述框架上设有所述高精度超声波测距传感器,通过向所述多层复合式柔性感知体表面发射超声波,能够实时监测所述聚氨酯记忆膜层的厚度变化;所述多层复合式柔性感知体最底层为隔热绝缘层,防止所述微型帕尔贴元件矩阵发热对蓬松紧密感复现产生影响。
14、可选的,所述多层复合式柔性感知体第四层内,所述弹性聚合物蜂窝网格置于所述底板上,并且其中均填充了所述镍钛合金形状记忆纤维柱,上端与所述多层复合式柔性感知体底面接触,且比所述弹性聚合物蜂窝网格高出约0.5mm,通过加热或冷却所述镍钛合金形状记忆纤维柱,以致其产生的不同大小的纵向收缩或拉伸变化量,并配合所述底板的竖直运动来复现物体的蓬松紧密感;在所述镍钛合金形状记忆纤维柱下方设置了若干个所述压力传感器,用于监测蓬松紧密感复现组件所受压力值;所述底板的位置由驱动组件调节。
15、可选的,远程触觉感知装置主对角线设有两个正置的驱动组件,即所述步进电机在所述丝杆的上方,用于带动所述底板竖直移动,配合所述蓬松紧密感复现基体运动。远程触觉感知装置副对角线设有两个倒置的驱动组件,即所述丝杆在所述步进电机的上方,用于带动所述下压板竖直移动,压紧所述多层复合式柔性感知体,防止手指在其表面滑动时所述多层复合式柔性感知体产生滑移。所述步进电机的输出端通过所述联轴器,并在所述轴承座的支撑下,将转矩传递至所述丝杆,并且所述法兰与所述底板固连,所述丝杆转动从而带动所述法兰运动,从而带动所述底板竖直运动,同理装置副对角线的一组驱动组件带动所述下压板下降压紧所述多层复合式柔性感知体。
16、本发明的第二解决方案是提供一种远程触觉感知方法,基于权利要求1-6所述的远程触觉感知装置,其特征在于:能够实现光滑粗糙感、温暖凉爽感、柔软硬挺感、刺痛柔和感、干爽湿润感和蓬松紧密感的远程触觉感知,具体包括以下步骤:
17、步骤一:通过触感量化系统获取远程物体的光滑粗糙感、温暖凉爽感、柔软硬挺感、刺痛柔和感、干爽湿润感和蓬松紧密感的触感特性数值;
18、步骤二:驱动组件带动下压板竖直向下运动,压紧多层复合式柔性感知体;
19、步骤三:当手指触摸多层复合式柔性感知体表面时,手指位置被红外触摸框捕捉,并由远程物体的触感特性数值,计算得到多层复合式柔性感知体各层中的触觉复现元件的各项控制参量数值大小,包括流经亚毫米级压电陶瓷薄膜致动器的电流大小、流经柔性柱状电极的电流强度、光感液晶聚合物网状涂层的受紫外光照时间、通过微型帕尔贴元件矩阵的电流极性及电流大小、两层柔性电极层间施加的电压和镍钛合金形状记忆纤维柱的温度;
20、步骤四:多层复合式柔性感知体中的亚毫米级压电陶瓷薄膜致动器产生纵向的位移,柔性柱状电极产生微小的电流刺激,光感液晶聚合物网状涂层在紫外光照射下吸收或者释放液体,微型帕尔贴元件矩阵产生冷热变化;并且当手指向下压多层复合式柔性感知体时,两层柔性电极层间施加电压使得夹层的聚氨酯记忆膜层的厚度产生变化;加热或者冷却镍钛合金形状记忆纤维柱,使其产生不同大小的纵向收缩或拉伸变化量;
21、步骤五:通过光纤传感器监测多层复合式柔性感知体的表面状态变化, 电流传感器监测流经柔性柱状电极的电流强度,湿度传感器监测多层复合式柔性感知体表面的湿度状态,温度传感器监测多层复合式柔性感知体表面温度,高精度超声波测距传感器监测聚氨酯记忆膜层的厚度变化,压力传感器监测蓬松紧密感复现组件所受压力值,并将这些监测值对应的复现的触感特性数值与需要复现的远程物体的触感特性数值进行对比,根据两组触感特性数值之间的误差,调整多层复合式柔性感知体各层中的触觉复现元件的各项控制参量的数值大小,直到误差被消除,实现各维度触感的精确复现;
22、步骤六:远程物体的触感特性数值同时传递给虚拟现实系统,在虚拟现实环境中构建与触感特性数值对应的远程物体,当用户触摸多层复合式柔性感知体时,将远程物体的触觉与视觉同时复现给用户,实现触觉与视觉融合的远程触觉感知。
23、可选的,所述远程触觉感知方法,其特征在于:将触感量化系统获取的远程物体的人群共性或群体个性或个体个性的触感特性数值传递给多层复合式柔性感知体和虚拟现实系统,当用户触摸置于支撑组件上的多层复合式柔性感知体时,能够实现人群共性、群体个性及个体个性触感的复现和融合触觉与视觉的主动式远程触觉感知;将多层复合式柔性感知体制成环状薄膜内衬集成于数据手套或数据袖套内,形成触感复现手套或复现袖套,将远程物体的人群共性或群体个性触感复现在触感复现手套或复现袖套上,感知者能够感受到远程物体的触感,实现被动式远程触感感知,将远程物体的触感特性数值同时传递给虚拟现实系统,能够实现融合触觉与视觉的被动式远程触觉感知。
24、可选的,所述基于远程触觉感知的人机交互方法,其特征在于:根据智能制造、远程医疗、在线购物、线上实操、虚拟游戏这类远程操作场景中远程物体通过触觉量化系统得到的个体个性触感特性数值,用户基于权利要求1-6任意一项所述的远程触觉感知装置及所述远程物体的个体个性触感特性数值,对所述个体个性触感特性数值进行触感复现,使用户能够感知远程物体的触感;所述个体个性触感特性数值及远程物体信息同时传递给虚拟现实系统,结合数据手套及数据衣获取的用户操作的手部及身体的运动信息,在虚拟现实环境中构建与个体个性触感特性数值、远程物体信息和用户操作的运动信息对应的场景,通过权利要求1-6任意一项所述的远程触觉感知装置和虚拟现实系统,将触觉与视觉同时复现给用户,让用户使用智能制造、远程医疗、在线购物、线上实操、虚拟游戏这类远程操作应用时能够实现带有远程触觉交互的人机交互。
25、本发明与现有技术相比,具有以下优点:采用本发明,能让感知到材料真实的光滑粗糙感、温暖凉爽感、柔软硬挺感、刺痛柔和感、干爽湿润感以及蓬松紧密感等触感,并且将多层复合式柔性感知体制成环状薄膜内衬集成于数据手套或数据袖套内,通过远程触觉感知装置和虚拟现实系统,让用户在构建的虚拟现实+环境的场景中使用智能制造、远程医疗、在线购物、线上实操、虚拟游戏这类远程操作应用时能够实现带有远程触觉交互的人机交互。
- 还没有人留言评论。精彩留言会获得点赞!