一种四阶多项式相位信号参数估计方法
本发明涉及相位信号参数估计的,尤其涉及一种四阶多项式相位信号参数估计方法,可以实现高机动雷达目标检测和参数估计。
背景技术:
1、雷达技术中,为了实现更高的探测距离和速度分辨率,通常要延长观测时间,由于目标的机动性,回波相位表现为非均匀变化的特点,需要用多项式相位信号模型描述。电子侦察技术中,信号多呈现出时变的非平稳特点,也可以用多项式相位信号模型描述。无线通信技术中,收发双方的相对运动会导致时变的多普勒频率,接收信号呈现出变化的瞬时频率,也可以采用多项式相位信号模型建模。综上,多项式相位信号模型广泛应用于雷达、电子侦察、无线通信等技术中。
2、多项式相位信号的各阶参数具有明确的物理含义,例如雷达回波的一阶多项式系数对应目标的径向速度、二阶多项式系数对应目标的加速度、三阶多项式系数对应目标的加加速度等;因此,参数估计是多项式相位信号处理的核心需求之一。多项式的阶数越高,对信号的表达能力越强,能更精确地建模信号,但是阶数的提高会给参数估计带来更高的计算复杂度。正弦信号可以看做一阶多项式相位信号,可以用快速傅里叶变换算法(fft)予以实现。非平稳信号用一阶多项式相位信号模型建模会出现模型的失配,造成明显的性能损失。雷达、声呐、超声成像中常用的线性调频信号可以看做二阶多项式相位信号,可以采用分数阶傅里叶变换、非均匀快速傅里叶变换(nufft)、吕氏分布(lvd)等算法实现参数估计。非平稳性更强的信号用二阶多项式相位信号建模依然会有模型失配现象,造成性能下降。三阶、四阶多项式模型可以建模非平稳性更强的信号。三阶多项式相位信号参数估计方法得到了大量研究,主要有离散调频率傅里叶变换(discrete chirp fourier transform,dcft)、多项式winger-ville分布(polynomial winger-ville distribution,pwvd)等方法,但是表达能力更强的四阶多项式相位信号模型研究较少,主要原因是其参数较多,参数空间搜索计算复杂度很高。
技术实现思路
1、针对现有高阶多项式相位信号参数估计方法的参数较多,计算复杂度较高的技术问题,本发明提出一种四阶多项式相位信号参数估计方法,通过几种瞬时自相关函数实现参数的降阶,使大多数步骤都可以采用fft实现,实现了计算复杂度和参数估计性能之间的平衡。
2、为了达到上述目的,本发明的技术方案是这样实现的:一种四阶多项式相位信号参数估计方法,其步骤如下:
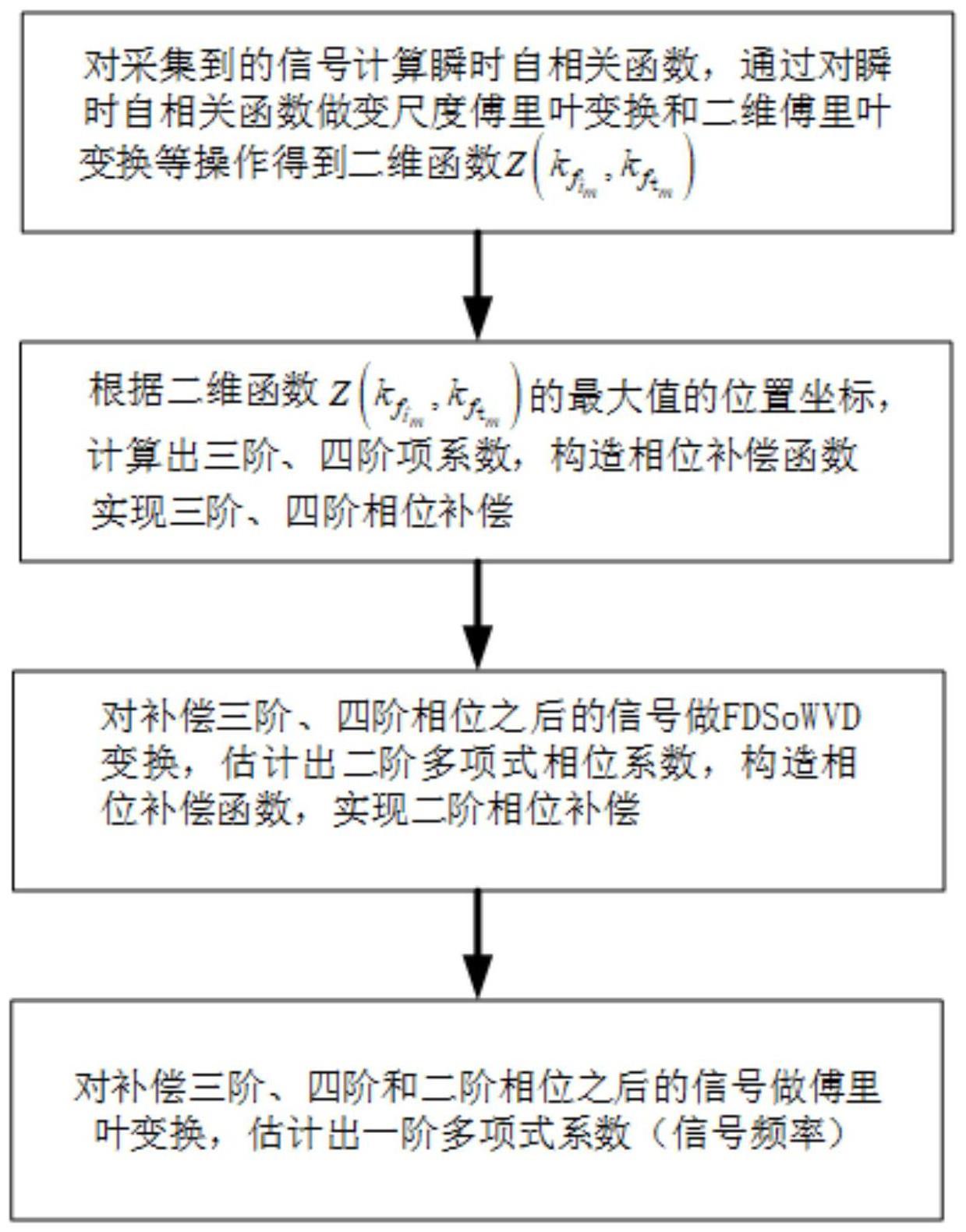
3、步骤一:根据采集的四阶多项式相位信号计算瞬时自相关函数,对瞬时自相关函数做变尺度傅里叶变换算法和二维傅里叶变换得到二维函数;
4、步骤二:根据二维函数的峰值的位置坐标分别估计三阶项系数和四阶项系数,通过三阶项系数和四阶项系数构造信号的高阶相位补偿函数,利用高阶相位补偿函数对四阶多项式相位信号进行相位补偿,得到高阶相位补偿信号;
5、步骤三:对高阶相位补偿信号做sowvd变换,估计出二阶多项式相位系数,利用二阶多项式相位系数构造二次项补偿函数实现二阶相位补偿,得到二次项补偿信号;
6、步骤四:对二次项补偿信号做二维傅里叶变换,采用峰值检测算法估计一阶多项式系数。
7、优选地,所述多阶多项式相位信号为四阶多项式相位信号,离散化采样后的四阶多项式相位信号的数学模型为:
8、
9、式中,ρ为复幅度,a1为信号频率,a2为调频率,a3和a4分别为二次和三次调频率,m表示慢时间采样序号,且m=-m/2:m/2-1,m表示脉冲个数,tr表示慢时间采样间隔,对应脉冲重复间隔,与脉冲重复频率prf的关系为tr=1/prf。
10、优选地,计算瞬时自相关函数的方法为:
11、引入延时变量mτ,通过瞬时对称自相关函数r1(m,mτ)降低慢时间维四阶多项式相位信号的阶数;
12、利用共轭对称自相关函数消去瞬时对称自相关函数r1(m,mτ)的第一个指数项,得到共轭对称自相关函数其中,表示延时常量对应的索引号;
13、将瞬时对称自相关函数r1(m,mτ)与共轭对称自相关函数相乘消去第一个指数项得到函数x(m,mτ);函数x(m,mτ)沿慢时间维计算得到瞬时自相关函数r3(m,mτ',mτ),其中,mτ'表示延时变量对应的索引号。
14、优选地,所述瞬时对称自相关函数
15、
16、其中,ρ1表示瞬时对称自相关函数r1(m,mτ)的复幅度,上式简化为:
17、
18、所述共轭对称自相关函数为延时常量,()*表示取共轭;
19、化简得到共轭对称自相关函数:
20、
21、由于共轭对称自相关函数中引入了延时常量第二个指数项中的二维耦合项得到保留,则函数
22、
23、式(5)中与mτtr存在耦合,为了便于采用fft算法实现多项式相位系数估计,对函数x(m,mτ)沿慢时间维计算,得到瞬时自相关函数:
24、
25、优选地,所述变尺度傅里叶变换算法实现变量的尺度变换和变量替换;所述变尺度傅里叶变换算法实现变量的尺度变换的方法为:瞬时自相关函数:
26、
27、其中,延时变量ξ表示尺度伸缩因子常量,表示尺度变换之后mτ'对应的延时变量;
28、沿延时变量mτ做累加,消去延时变量mτ得函数:
29、
30、其中,表示沿延时变量mτ做累加;
31、变尺度傅里叶变换算法实现变量替换的方法为:函数
32、
33、其中,慢时间采样序号η为尺度变换因子常量,表示尺度变换之后m对应的延时变量;
34、对函数做二维傅里叶变换,得到二维函数:
35、
36、式中,ρ2表示能量峰幅度,分别表示对应的频率变量采样点序号,nf表示频率采样点数,f0表示频率变量采样间隔且fs表示采样频率,δ()表示狄拉克函数。
37、优选地,估计三阶项系数和四阶项系数的方法为:瞬时自相关函数二维傅里叶变换后得到的二维函数能量峰在平面上的位置为则三阶、四阶多项式相位信号的系数估计值分别为
38、根据三阶、四阶多项式相位信号的系数估计值构造信号的高阶相位补偿函数:
39、通过高阶相位补偿函数对采集的信号进行补偿得到高阶相位补偿信号:
40、
41、由于高阶相位补偿信号转化为:
42、
43、优选地,高阶相位补偿信号sc(m)为线性调频信号,用sowvd变换实现二阶多项式相位系数a2的估计:
44、对高阶相位补偿信号sc(m)做sowvd变换后,得到二维函数:
45、
46、其中,ρ3表示二维函数能量峰的复幅度,为延时常量,分别表示m、mτ对应的频率变量采样点序号;
47、且二维函数其中,
48、
49、在平面上,高阶相位补偿信号sc(m)对应的能量峰的位置为能量峰的位置估计值为对应的调频率为二阶多项式相位系数的估计值
50、优选地,对高阶相位补偿信号做fdsowvd变换,fdsowvd变换的方法为:
51、能量峰总是在的位置,沿延时变量mτ轴的傅里叶变换用累加代替为函数:
52、
53、sc(m)的二阶提升自相关函数为:
54、将变换函数做变形:
55、
56、令
57、有
58、令延时变量mτ”=mτ-m,则有:
59、其中,rsoiaf(m)是信号sc,1(mτ)和信号sc,2(mτ)的互相关函数的二抽取函数;sc,1(mτ)和sc,2(mτ)的互相关函数通过频域相乘得到,即
60、
61、式中,ds2,m表示对信号sc,1(mτ)和信号sc,2(mτ)的互相关函数做二抽取操作,得到二阶提升自相关函数rsoiaf(m),fftm,2m()、ifftm,2m()分别表示沿m轴做点数为2m的傅里叶变换和逆傅里叶变换;将函数rsoiaf(m)代入函数得:
62、
63、其中,fftm,m()表示沿m轴做点数为m的傅里叶变换。
64、优选地,构造二次项补偿函数:
65、利用二次项补偿函数h2(m)补偿掉二次相位项,得到二次项补偿信号:
66、
67、考虑到则二次项补偿信号sc2(m)≈ρexp(j2πa1mtr);
68、二次项补偿信号sc2(m)为正弦信号,利用fft变换实现能量积累后,采用峰值检测算法估计出峰值位置则二次项补偿信号sc2(m)的频率为估计的一阶多项式系数
69、优选地,所述尺度伸缩因子常量ξ、尺度变换因子常量η的取值准则为:
70、
71、根据算法应用场景确定三阶、四阶多项式相位信号的系数的绝对值|a3|、|a4|的最大值|a3|max、|a4|max,fs为采样频率。与现有技术相比,本发明的有益效果:
72、本发明将信号采用四阶多项式相位模型进行建模,可以更加准确地描述长时间观测时的实际信号,避免了模型失配造成的性能损失,实现更好的能量积累性能;同时,通过提出的几种瞬时自相关函数实现参数的降阶,采用变尺度傅里叶变换算法实现不同变量之间的解耦,使得大部分计算都可以利用fft实现,降低了计算复杂度。因此,本发明可以在低计算复杂度条件下,有效提高输出信噪比,提高参数估计和能量积累性能。
- 还没有人留言评论。精彩留言会获得点赞!