鱼眼镜头相机参数校正方法、系统、设备、及存储介质与流程
本技术涉及摄像的领域,尤其是涉及一种鱼眼镜头相机参数校正方法、系统、设备、及存储介质。
背景技术:
1、鱼眼镜头在制作时受到镜片打磨偏差、感光组件安装位置偏差、模块化组装偏差等因素的影响,故通过初步制作完成的鱼眼镜头获得的图像与预期图像相比存在一定的偏差,为此需要对初步制作完成的鱼眼镜头进行参数校正;完成参数校正后的鱼眼镜头所拍摄的图像便于用于测量所拍摄物体的真实长度或距离,还便于用于将扭曲图像还原。
2、目前的一种鱼眼镜头相机参数校正方式为:通过待校正的鱼眼镜头依次拍摄若干张涉及不同摆放角度的棋盘格校正板的图像,棋盘格校正板如同国际象棋棋盘,其上设置有若干黑白相间的棋盘格,每个棋盘格均有四个角点;在实施中,通过预设的角点侦测模型对拍摄到的棋盘格校正板图像进行处理,从而得到棋盘格校正板图像上各个角点像素坐标,然后获取与每个角点像素坐标对应的实际世界坐标,然后将角点像素坐标以及对应的实际世界坐标输入预设的校正算法模型中进行运算,从而得到校正后的鱼眼镜头参数。
3、在实现本技术的过程中,发现上述技术至少存在以下问题:鱼眼镜头拍摄出的棋盘格校正板图像扭曲较为严重,即使通过角点侦测模型侦测出棋盘格校正板图像上的各个角点像素坐标,但是受到棋盘格校正板图像扭曲严重的影响,后续难以按照一定的顺序向校正算法模型中输入角点像素坐标,可输入至校正算法模型中的实际世界坐标是按照一定顺序输入的,如此导致输入至校正算法模型中的角点像素坐标与相同顺序的实际世界坐标并不对应,从而导致校正算法模型计算出的鱼眼镜头参数精确度不高。
技术实现思路
1、为了便于提升计算出的鱼眼镜头参数的精确度,本技术提供一种鱼眼镜头相机参数校正方法、系统、设备、及存储介质。
2、第一方面,本技术提供一种鱼眼镜头相机参数校正方法,采用如下的技术方案:
3、一种鱼眼镜头相机参数校正方法,包括:
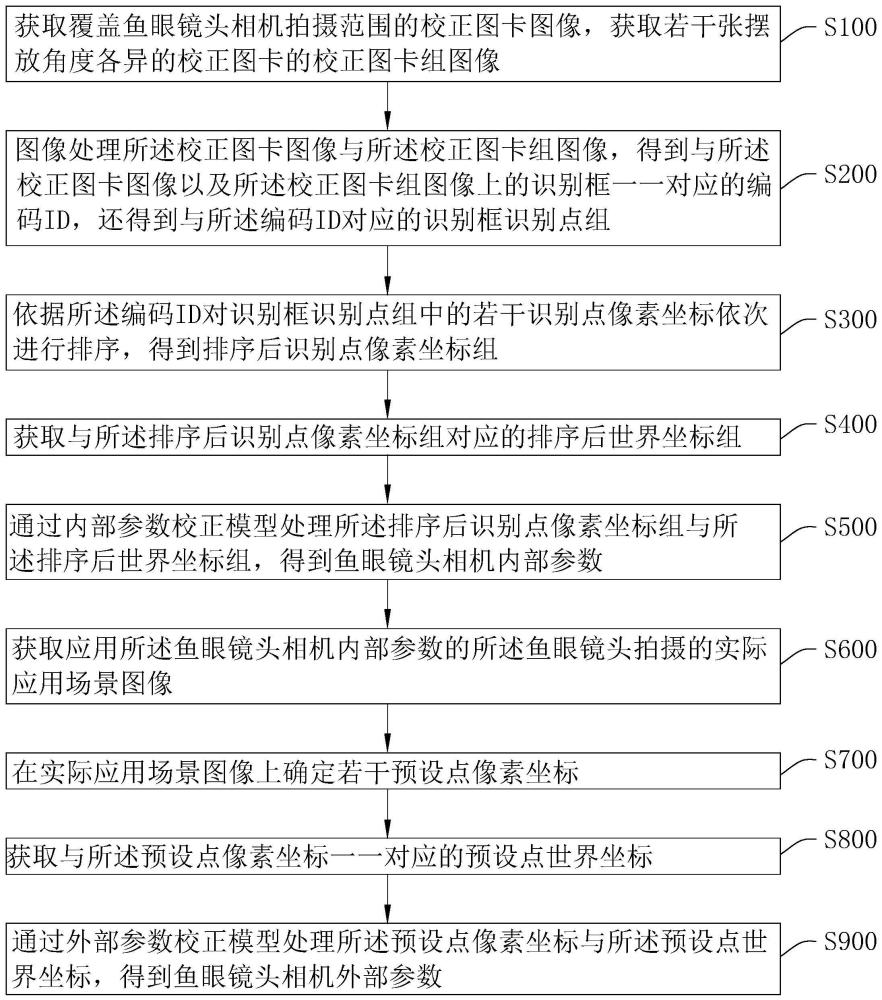
4、获取覆盖鱼眼镜头相机拍摄范围的校正图卡图像,获取若干张摆放角度各异的校正图卡的校正图卡组图像;
5、图像处理所述校正图卡图像与所述校正图卡组图像,得到与所述校正图卡图像以及所述校正图卡组图像上的识别框一一对应的编码id,还得到与所述编码id对应的识别框识别点组;依据所述编码id对识别框识别点组中的若干识别点像素坐标依次进行排序,得到排序后识别点像素坐标组;
6、获取与所述排序后识别点像素坐标组对应的排序后世界坐标组;
7、通过内部参数校正模型处理所述排序后识别点像素坐标组与所述排序后世界坐标组,得到鱼眼镜头相机内部参数。
8、通过采用上述技术方案,能覆盖鱼眼镜头相机拍摄范围的校正图卡图像与若干张摆放角度各异的校正图卡的校正图卡组图像可以满足图像处理的输入要求,并能满足使得到鱼眼镜头相机内部参数更准确所需的图像要求;通过编码id便于在即使拍摄出的校正图卡图像与校正图卡组图像出现严重扭曲的情况,依据编码id依旧可以对校正图卡图像与校正图卡组图像上的识别框的识别点像素坐标进行准确排序,杜绝了图像扭曲对识别点像素坐标排序的影响,如此便于使排序后识别点像素坐标组处于准确排序的状态,如此可以使输入至内部参数校正模型中的排序后识别点像素坐标组中的识别点像素坐标与相同排序的排序后世界坐标组中的世界坐标处于一一对应的状态,如此便于提升内部参数校正模型计算出的鱼眼镜头相机内部参数的准确度,从而提升提升最终计算出的鱼眼镜头参数的精确度。
9、在一个具体的可实施方案中,所述识别框为由若干第一色方格与若干第二色方格组成的方框,所述第二色方格设置在所述方框内部区域。
10、通过采用上述技术方案,相较于现有技术直接以图像处理校正板图像从而获取棋盘格校正板图像中相应棋盘格角点像素坐标的方式,在识别框中设置颜色不同的第一色方格与第二色方格,并将第二色方格设置在方框内部区域,如此便于依据第二色方格进一步配合图像处理的方式计算出更为精准的识别点像素坐标。
11、在一个具体的可实施方案中,所述识别点像素坐标包含与所述方框的角点一一对应的角点像素坐标,以及与所述方框的中心点对应的中心点像素坐标。
12、通过采用上述技术方案,相较于单个棋盘格只能计算出角点像素坐标,具有第一色方格与第二色方格的识别框还便于计算出其中心点像素坐标,从而便于提升输入至内部参数校正模型中参数种类及数量,进而便于提升计算出鱼眼镜头相机内部参数的精确度。
13、在一个具体的可实施方案中,所述依据所述编码id对识别框识别点组中的若干识别点像素坐标依次进行排序,得到排序后识别点像素坐标组的步骤包括:
14、依据所述编码id对所述识别框进行排序,得到与所述识别框一一对应的识别框序号;
15、依据所述识别框序号依次对相应所述识别框的所述角点像素坐标进行排序,得到排序后角点像素坐标组;
16、依据所述识别框序号依次对相应所述识别框的所述中心点像素坐标进行排序,得到排序后中心点像素坐标组;
17、综合排序所述排序后角点像素坐标组与所述排序后中心点像素坐标组,得到所述排序后识别点像素坐标组。
18、通过采用上述技术方案,依据编码id便于确定对应识别框的位置,然后对每个识别框进行排序,在完成对识别框排序的基础上再对与每个识别框对应的角点像素坐标以及中心点像素坐标进行排序,如此便于使角点像素坐标以及中心点像素坐标以一定顺序进行排序,不会出现排序错误的情况,如此便于防止后续出现识别点像素坐标与相同排序的世界坐标不对应的情况。
19、在一个具体的可实施方案中,所述获取与所述排序后识别点像素坐标组对应的排序后世界坐标组的步骤包括:
20、获取与所述排序后识别点像素坐标组中的所述识别点像素坐标一一对应的识别点世界坐标;按照所述排序后识别点像素坐标组中的所述识别点像素坐标的排列顺序对所述识别点世界坐标进行排序,得到所述排序后世界坐标组。
21、通过采用上述技术方案,可以在将识别点世界坐标输入至内部参数校正模型前,使其与对应的识别点像素坐标保持顺序一致,如此便于内部参数校正模型单次对识别点像素坐标与对应的识别点世界坐标进行处理,从而便于提升计算出的鱼眼镜头相机内部参数的准确度。
22、在一个具体的可实施方案中,所述得到鱼眼镜头相机内部参数后的步骤包括:
23、获取应用所述鱼眼镜头相机内部参数的所述鱼眼镜头拍摄的实际应用场景图像;
24、在所述实际应用场景图像上确定若干预设点像素坐标;
25、获取与所述预设点像素坐标一一对应的预设点世界坐标;。
26、通过外部参数校正模型处理所述预设点像素坐标与所述预设点世界坐标,得到鱼眼镜头相机外部参数。
27、通过采用上述技术方案,在计算出鱼眼镜头相机内部参数的基础上,依据应用鱼眼镜头相机内部参数的鱼眼镜头拍摄实际应用场景的图像,然后还定义若干预设点像素坐标,然后再将若干预设点像素坐标与对应的预设点世界坐标输入至外部参数校正模型中进行处理,从而得到对应的鱼眼镜头相机外部参数,鱼眼镜头相机外部参数便于在应用在鱼眼镜头的实际拍摄过程中,从而便于得到更加符合预期的实际拍摄图像。
28、第二方面,本技术提供一种鱼眼镜头相机参数校正系统,采用如下的技术方案:
29、一种鱼眼镜头相机参数校正系统,包括:
30、图卡图像获取模块,用于获取覆盖鱼眼镜头相机拍摄范围的校正图卡图像,获取若干张摆放角度各异的校正图卡的校正图卡组图像;
31、编码id与识别框识别点组获取模块,用于图像处理所述校正图卡图像与所述校正图卡组图像,得到与所述校正图卡图像以及所述校正图卡组图像上的识别框一一对应的编码id,还得到与所述编码id对应的识别框识别点组;
32、排序后识别点像素坐标组获取模块,用于依据所述编码id对识别框识别点组中的若干识别点像素坐标依次进行排序,得到排序后识别点像素坐标组;
33、排序后世界坐标组获取模块,用于获取与所述排序后识别点像素坐标组对应的排序后世界坐标组;
34、鱼眼镜头相机内部参数获取模块,用于通过内部参数校正模型处理所述排序后识别点像素坐标组与所述排序后世界坐标组,得到鱼眼镜头相机内部参数。
35、通过采用上述技术方案,能覆盖鱼眼镜头相机拍摄范围的校正图卡图像与若干张摆放角度各异的校正图卡的校正图卡组图像可以满足图像处理的输入要求,并能满足使得到鱼眼镜头相机内部参数更准确所需的图像要求;通过编码id便于在即使拍摄出的校正图卡图像与校正图卡组图像出现严重扭曲的情况,依据编码id依旧可以对校正图卡图像与校正图卡组图像上的识别框的识别点像素坐标进行准确排序,杜绝了图像扭曲对识别点像素坐标排序的影响,如此便于使排序后识别点像素坐标组处于准确排序的状态,如此可以使输入至内部参数校正模型中的排序后识别点像素坐标组中的识别点像素坐标与相同排序的排序后世界坐标组中的世界坐标处于一一对应的状态,如此便于提升内部参数校正模型计算出的鱼眼镜头相机内部参数的准确度,从而提升提升最终计算出的鱼眼镜头参数整体的精确度。
36、第三方面,本技术提供一种计算机设备,采用如下技术方案:包括存储器和处理器,所述存储器上存储有能够被处理器加载并执行如上述任意一种鱼眼镜头相机参数校正方法的计算机程序。
37、第四方面,本技术提供一种计算机可读存储介质,采用如下技术方案:存储有能够被处理器加载并执行上述任意一种鱼眼镜头相机参数校正方法的计算机程序。
38、综上所述,本技术包括以下至少一种有益技术效果:
39、1.便于提升计算出的鱼眼镜头参数的精确度;
40、2.便于防止后续出现识别点像素坐标与相同排序的世界坐标不对应的情况;
41、3.便于得到更加符合预期的实际拍摄图像。
- 还没有人留言评论。精彩留言会获得点赞!