一种无人机集群智能调度管理系统的制作方法
本发明涉及图像去噪,具体涉及一种无人机集群智能调度管理系统。
背景技术:
1、随着科技的发展,无人机的应用越来越广泛,例如,无人机可以应用于为灾情现场的人员提供救援物资。为了提高无人机救援效率,往往需要基于采集的待调度无人机区域的红外图像,对无人机集群进行调度管理。其中,待调度无人机区域可以是需要进行无人机调度的区域。比如,待调度无人机区域可以是需要无人机进行救援的火灾现场。由于采集的红外图像中往往包含影响图像清晰度的噪声,从而往往影响后续对无人机集群进行调度管理的准确度,因此为了提高对无人机集群进行调度管理的准确度,往往需要对采集的红外图像进行去噪。目前,对图像进行去噪时,通常采用的方式为:采用预设尺寸的搜索窗口,对图像进行非局部均值去噪,得到去噪后的图像。
2、然而,当采用非局部均值去噪的方式,对待调度无人机区域的红外图像进行去噪时,经常会存在如下技术问题:
3、预设尺寸往往是基于人工经验设置的尺寸,当采用人工的方式,设置搜索窗口的尺寸时,往往是凭借人为的主观经验对搜索窗口的尺寸进行设置,作出的设置结果往往不准确,因此,当采用人工的方式,设置搜索窗口的尺寸时,往往导致搜索窗口尺寸设置的准确度低下,从而导致对红外图像进行去噪的效果较差,进而往往导致对无人机集群进行调度管理的准确度低下。
技术实现思路
1、本发明的内容部分用于以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。本发明的内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
2、为了解决由于图像去噪效果不好导致的对无人机集群进行调度管理的准确度低下的技术问题,本发明提出了一种无人机集群智能调度管理系统。
3、本发明提供了一种无人机集群智能调度管理系统,该系统包括:
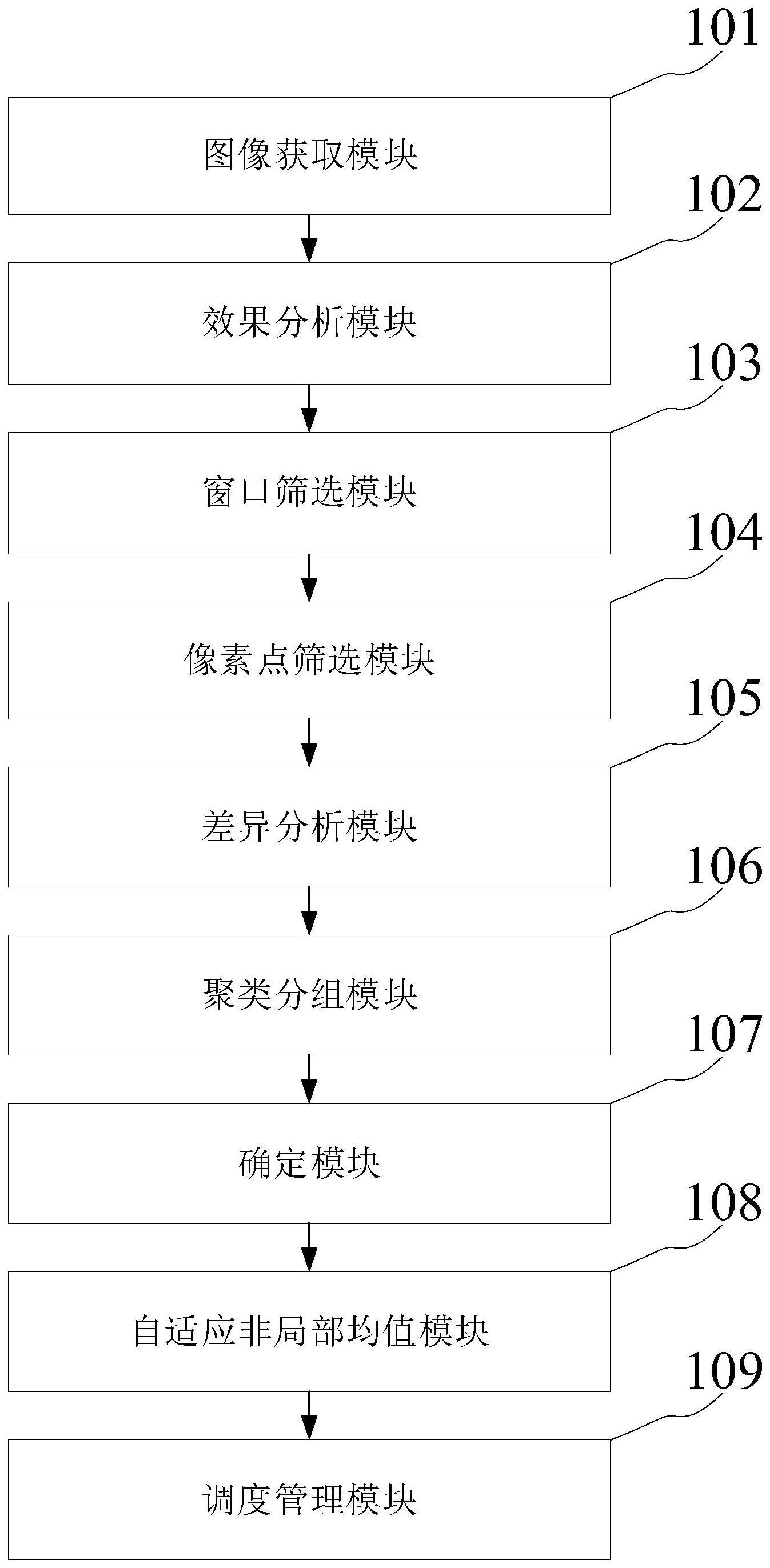
4、图像获取模块,用于获取待调度无人机区域对应的目标红外图像;
5、效果分析模块,用于根据预设搜索窗口集合中的每个不同尺寸的预设搜索窗口,对所述目标红外图像进行非局部均值去噪效果分析处理,得到所述预设搜索窗口对应的噪声干扰指标;
6、窗口筛选模块,用于根据噪声干扰指标,从预设搜索窗口集合中筛选出最优搜索窗口;
7、像素点筛选模块,用于从所述目标红外图像中的每个目标像素点对应的最优搜索窗口中筛选出参考像素点集合;
8、差异分析模块,用于对每个目标像素点和每个参考像素点对应的邻域窗口进行差异分析处理,得到所述目标像素点和所述参考像素点之间的目标差异指标;
9、聚类分组模块,用于根据目标差异指标,对每个目标像素点对应的参考像素点集合中的各个参考像素点进行聚类分组处理,得到所述目标像素点对应的相似聚类簇和差别聚类簇集合;
10、确定模块,用于根据目标差异指标,确定每个目标像素点对应的相似聚类簇对应的目标权重和差别聚类簇集合中的每个参考像素点对应的目标权重;
11、自适应非局部均值模块,用于根据所述目标红外图像中的每个目标像素点对应的相似聚类簇对应的目标权重和差别聚类簇集合中的各个参考像素点对应的目标权重,对所述目标像素点进行自适应非局部均值去噪,得到目标去噪图像;
12、调度管理模块,用于根据所述目标去噪图像,对无人机集群进行调度管理。
13、可选地,所述根据预设搜索窗口集合中的每个不同尺寸的预设搜索窗口,对所述目标红外图像进行非局部均值去噪效果分析处理,得到所述预设搜索窗口对应的噪声干扰指标,包括:
14、对所述目标红外图像进行边缘检测,得到目标边缘点集合;
15、根据所述目标边缘点集合,确定所述预设搜索窗口集合中的每个预设搜索窗口对应的噪声干扰指标。
16、可选地,所述根据所述目标边缘点集合,确定所述预设搜索窗口集合中的每个预设搜索窗口对应的噪声干扰指标,包括:
17、将所述预设搜索窗口,确定为所述目标边缘点集合中的每个目标边缘点对应的搜索窗口;
18、将每个目标边缘点对应的搜索窗口中梯度大小相同的边缘像素点,划分为一个边缘像素点组,得到所述目标边缘点在所述预设搜索窗口对应的边缘像素点组集合;
19、将所述边缘像素点组集合中边缘像素点组的数量,确定为所述目标边缘点在所述预设搜索窗口对应的梯度类型数量;
20、根据所述边缘像素点组集合和所述目标边缘点对应的搜索窗口,确定所述目标边缘点在所述预设搜索窗口对应的梯度复杂熵;
21、将所述目标边缘点集合中所有目标边缘点在所述预设搜索窗口对应的梯度复杂熵的方差,确定为所述预设搜索窗口对应的参考复杂指标;
22、将所述目标边缘点集合中目标边缘点的数量,确定为第一数量;
23、将所述目标边缘点集合中的各个目标边缘点在所述预设搜索窗口对应的梯度类型数量的累加值,确定为所述预设搜索窗口对应的第二数量;
24、将所述预设搜索窗口对应的第二数量与所述第一数量的比值,确定为所述预设搜索窗口对应的第一滤波指标;
25、根据所述预设搜索窗口对应的第一滤波指标和参考复杂指标,确定所述预设搜索窗口对应的噪声干扰指标,其中,第一滤波指标与噪声干扰指标呈负相关,参考复杂指标与噪声干扰指标呈正相关。
26、可选地,所述根据所述边缘像素点组集合和所述目标边缘点对应的搜索窗口,确定所述目标边缘点在所述预设搜索窗口对应的梯度复杂熵,包括:
27、将所述边缘像素点组集合中的每个边缘像素点组中边缘像素点的数量,在所述目标边缘点对应的搜索窗口中边缘像素点的数量中的占比,确定为目标占比,得到所述目标边缘点在所述预设搜索窗口对应的目标占比集合;
28、根据所述目标占比集合,确定所述目标边缘点在所述预设搜索窗口对应的梯度复杂熵。
29、可选地,所述对每个目标像素点和每个参考像素点对应的邻域窗口进行差异分析处理,得到所述目标像素点和所述参考像素点之间的目标差异指标,包括:
30、将所述目标像素点对应的邻域窗口和所述参考像素点对应的邻域窗口内,相同位置处的像素点对应的灰度值的差值的平方,确定为第一差异,得到所述目标像素点和所述参考像素点之间的第一差异集合;
31、根据所述第一差异集合,确定所述目标像素点和所述参考像素点之间的目标差异指标,其中,第一差异集合中的第一差异与目标差异指标呈正相关。
32、可选地,所述根据目标差异指标,确定每个目标像素点对应的相似聚类簇对应的目标权重和差别聚类簇集合中的每个参考像素点对应的目标权重,包括:
33、根据每个目标像素点和每个参考像素点之间的目标差异指标,确定所述参考像素点对应的第一权重,其中,目标差异指标与第一权重呈负相关;
34、将所述差别聚类簇集合中的每个参考像素点对应的第一权重,确定为所述差别聚类簇集合中的每个参考像素点对应的目标权重;
35、根据所述相似聚类簇中的各个参考像素点对应的第一权重,确定所述相似聚类簇对应的目标权重,其中,第一权重与目标权重呈正相关。
36、可选地,所述根据所述目标红外图像中的每个目标像素点对应的相似聚类簇对应的目标权重和差别聚类簇集合中的各个参考像素点对应的目标权重,对所述目标像素点进行自适应非局部均值去噪,得到目标去噪图像,包括:
37、将所述目标像素点对应的相似聚类簇的聚类中心对应的灰度值,确定为所述目标像素点对应的第一灰度指标;
38、将所述目标像素点对应的第一灰度指标和所述目标像素点对应的相似聚类簇对应的目标权重的乘积,确定为所述目标像素点对应的第二灰度指标;
39、将所述目标像素点对应的差别聚类簇集合中的每个参考像素点对应的灰度值和目标权重的乘积,确定为所述差别聚类簇集合中的每个参考像素点对应的第三灰度指标;
40、将所述差别聚类簇集合中的各个参考像素点对应的第三灰度指标的累加值,确定为所述目标像素点对应的第四灰度指标;
41、将所述目标像素点对应的第二灰度指标与第四灰度指标的和,确定为所述目标像素点对应的目标灰度指标;
42、将所述目标红外图像中的各个目标像素点对应的灰度值更新为对应的目标灰度指标,得到目标去噪图像。
43、可选地,所述根据目标差异指标,对每个目标像素点对应的参考像素点集合中的各个参考像素点进行聚类分组处理,得到所述目标像素点对应的相似聚类簇和差别聚类簇集合,包括:
44、将所述目标像素点和每个参考像素点之间的目标差异指标,确定为所述参考像素点对应的聚类指标;
45、从所述目标像素点对应的参考像素点集合中筛选出聚类指标最小的参考像素点,作为所述目标像素点对应的初始聚类中心;
46、根据预设差异阈值和所述目标像素点对应的初始聚类中心,对所述目标像素点对应的参考像素点集合中的各个参考像素点进行聚类,得到所述目标像素点对应的目标聚类簇集合;
47、对所述目标像素点对应的目标聚类簇集合进行分组处理,得到所述目标像素点对应的相似聚类簇和差别聚类簇集合。
48、可选地,所述对所述目标像素点对应的目标聚类簇集合进行分组处理,得到所述目标像素点对应的相似聚类簇和差别聚类簇集合,包括:
49、将所述目标像素点对应的初始聚类中心所在的聚类簇,确定为所述目标像素点对应的相似聚类簇;
50、将所述目标像素点对应的目标聚类簇集合中除了初始聚类中心所在的聚类簇之外的各个聚类簇,确定为差别聚类簇,得到所述目标像素点对应的差别聚类簇集合。
51、可选地,所述从所述目标红外图像中的每个目标像素点对应的最优搜索窗口中筛选出参考像素点集合,包括:
52、将所述目标像素点对应的最优搜索窗口中除了中心像素点之外的各个像素点,确定为参考像素点,得到所述目标像素点对应的参考像素点集合。
53、本发明具有如下有益效果:
54、本发明的一种无人机集群智能调度管理系统,通过对目标红外图像进行去噪,解决了对红外图像进行去噪的效果较差的技术问题,从而提高了对无人机集群进行调度管理的准确度。首先,由于目标红外图像往往包含待调度无人机区域的环境状态信息,因此获取待调度无人机区域对应的目标红外图像可以便于后续基于去噪后的目标红外图像,对无人机集群进行调度管理。接着,由于采用不同的搜索窗口对图像进行非局部均值去噪的效果往往不同,因此基于预设搜索窗口集合中的每个预设搜索窗口,对目标红外图像进行非局部均值去噪效果分析处理,量化了每个预设搜索窗口对应的噪声干扰指标,从而在一定程度上降低了人为的主观影响,进而可以使后续筛选的最优搜索窗口更加的准确,从而可以提高后续对目标红外图像进行去噪的效果。然后,从目标红外图像中的每个目标像素点对应的最优搜索窗口中筛选出参考像素点集合,可以便于后续对每个目标像素点进行精确去噪。之后,综合考虑目标像素点和参考像素点之间的目标差异指标,可以提高相似聚类簇和差别聚类簇集合确定的准确度,并且可以提高目标权重确定的准确度。继续,根据目标权重,对目标红外图像中的每个目标像素点进行自适应非局部均值去噪,提高了对目标红外图像进行去噪的精确度。最后,基于目标去噪图像,实现了对无人机集群的调度管理,并且本发明量化了多个与去噪相关的指标,所以相较于采用人工预设的搜索窗口,对图像进行非局部均值去噪,本发明比较客观的确定了最优搜索窗口,并且综合考虑了参考像素点集合、目标差异指标、相似聚类簇、差别聚类簇集合和目标权重,因此本发明对目标红外图像中的每个目标像素点进行自适应非局部均值去噪,提高了图像去噪的精确度,从而提高了对无人机集群进行调度管理的准确度。
- 还没有人留言评论。精彩留言会获得点赞!