车辆在环仿真测试方法、系统、电子设备及存储介质与流程
本发明属于仿真测试,具体而言,涉及一种车辆在环仿真测试方法、系统、电子设备及存储介质。
背景技术:
1、随着国家政策扶持力度的不断加大、相关产业的日趋成熟,我国的车辆网技术飞速发展,并逐步应用到工业生产、智慧交通、物流运输以及信息化服务方面。在智能网联汽车领域,自动驾驶产品的不断升级迭代给我们的开发以及测试工作均带来了巨大的挑战。随着自动驾驶等级的升高,无论是产品的研发还是性能的测试,都需要大量的实车测试支撑,因此,实车测试所需要协调的外部条件也越来越复杂。与此同时,为了提升自动驾驶系统的测试覆盖率以满足不同测试场景的需求,则需在测试过程中,投入大量的时间、人力和物力成本以保障自动驾驶功能的安全性和可靠性。针对实车测试存在的以上各种问题,当前普遍采用硬件在环仿真测试的技术手段来解决。
2、目前已有的在环测试方法中采用视频注入的方式为车辆注入虚拟测试用例,该测试方法需要从车辆后方的仿真测试模组接线至车辆前方的前视摄像头,为前视摄像头进行虚拟测试用例注入。然而,在进行注入时,受传输线缆长度影响存在数据传输不稳定的情况,进而导致虚拟测试用例注入失败,仿真测试过程受到影响。
技术实现思路
1、本发明实施例提供了一种车辆在环仿真测试方法、系统、电子设备及存储介质,以至少解决虚拟测试用例注入失败,仿真测试过程受到影响的技术问题。
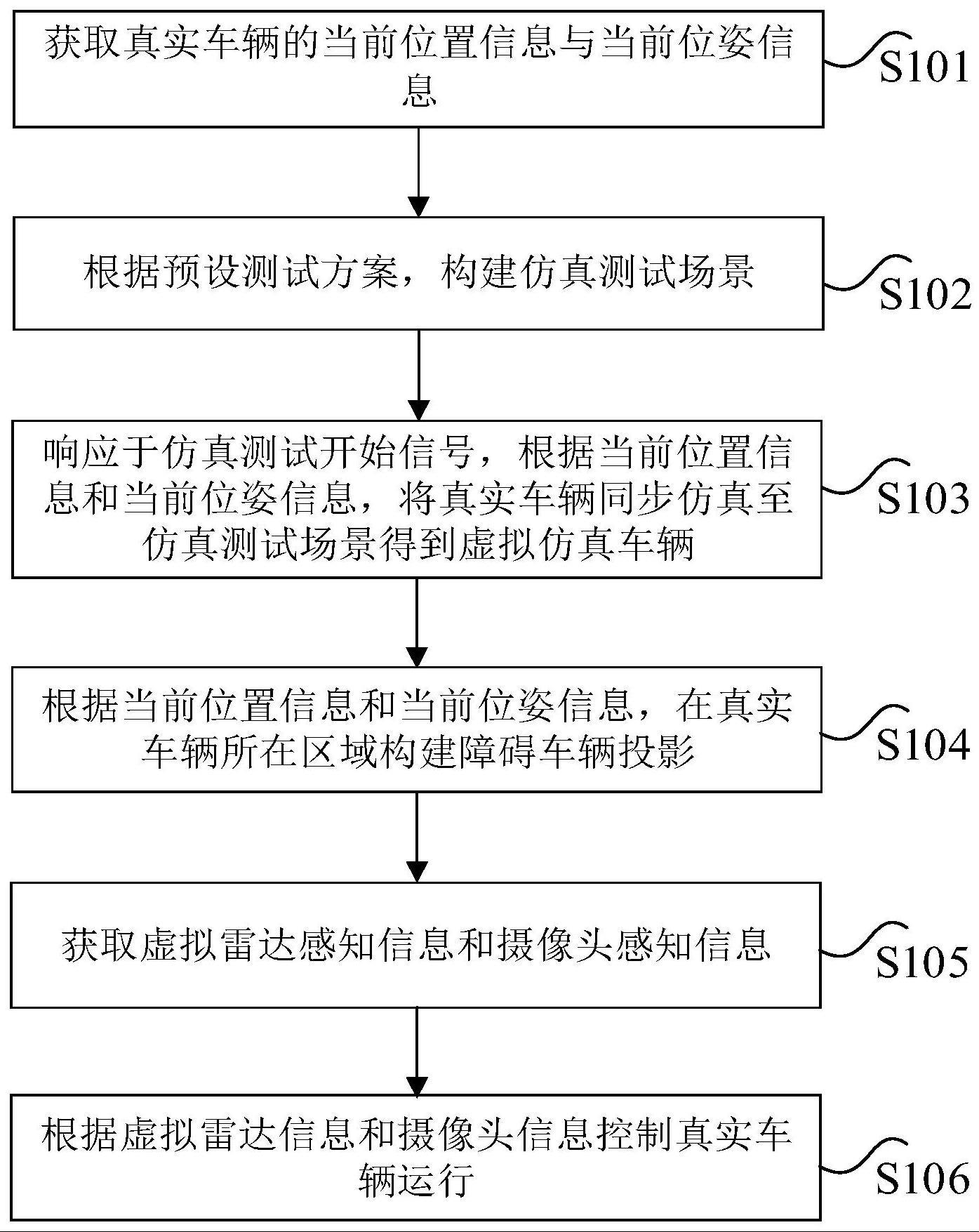
2、根据本发明实施例的第一个方面,提供了一种车辆在环仿真测试方法,包括:获取真实车辆的当前位置信息与当前位姿信息;根据预设测试方案,构建仿真测试场景;响应于仿真测试开始信号,根据当前位置信息和当前位姿信息,将真实车辆同步仿真至仿真测试场景得到虚拟仿真车辆,其中,虚拟仿真车辆包括虚拟雷达;根据当前位置信息和当前位姿信息,在真实车辆所在区域构建障碍车辆投影;获取虚拟雷达感知信息和摄像头感知信息,其中,虚拟雷达感知信息通过虚拟雷达感知仿真测试场景得到,摄像头设置于真实车辆,摄像头感知信息通过摄像头感知障碍车辆投影得到;根据虚拟雷达感知信息和摄像头感知信息控制真实车辆运行。
3、可选的,获取真实车辆的当前位置信息与当前位姿信息包括:获取真实车辆的中惯性导航系统的系统信号;对系统信号进行格式转换处理,得到当前位置信息和当前位姿信息。
4、可选的,根据预设测试方案,构建仿真测试场景包括:根据预设测试方案,构建天气环境仿真场景、道路仿真场景和车流仿真场景;结合天气环境仿真场景、道路仿真场景和车流仿真场景,确定仿真测试场景。
5、可选的,响应于仿真测试开始信号,根据当前位置信息和当前位姿信息,将真实车辆同步仿真至仿真测试场景得到虚拟仿真车辆包括:建立当前位置信息和当前位姿信息与虚拟位置和虚拟位姿的对应关系;根据虚拟位置和虚拟位姿,在仿真测试场景中仿真得到虚拟仿真车辆。
6、可选的,根据当前位置信息和当前位姿信息,在真实车辆所在区域构建障碍车辆投影包括:根据当前位置信息、当前位姿信息和预设投影参数,确定投影初始位置和投影初始位姿;根据投影初始位置和投影初始位姿,在真实车辆所在区域构建障碍车辆投影。
7、可选的,根据投影初始位置和投影初始位姿,在真实车辆所在区域构建障碍车辆投影包括:根据预设投影参数和预设三维渲染模型,确定三维车辆投影信息;根据三维车辆投影信息、投影初始位置和投影初始位姿,在真实车辆所在区域进行投影得到障碍车辆投影。
8、可选的,根据虚拟雷达感知信息和摄像头感知信息控制真实车辆运行包括:根据虚拟雷达感知信息和摄像头感知信息,利用预设决策模型确定车辆决策;根据车辆决策确定真实车辆控制信号;根据真实车辆控制信号控制真实车辆运行。
9、根据本发明实施例的第二方面,还提供一种车辆在环仿真测试系统,包括:
10、第一获取模块,用于获取真实车辆的当前位置信息与当前位姿信息;构建模块,用于根据预设测试方案,构建仿真测试场景;仿真模块,用于响应于仿真测试开始信号,根据当前位置信息和当前位姿信息,将真实车辆同步仿真至仿真测试场景得到虚拟仿真车辆,其中,虚拟仿真车辆包括虚拟雷达;投影模块,用于根据当前位置信息和当前位姿信息,在真实车辆所在区域构建障碍车辆投影;第二获取模块,用于获取虚拟雷达感知信息和摄像头感知信息,其中,虚拟雷达感知信息通过虚拟雷达感知仿真测试场景得到,摄像头设置于真实车辆,摄像头感知信息通过摄像头感知障碍车辆投影得到;控制模块,用于根据虚拟雷达感知信息和摄像头感知信息控制真实车辆运行。
11、可选的,第一获取模块还用于:获取真实车辆的中惯性导航系统的系统信号;对系统信号进行格式转换处理,得到当前位置信息和当前位姿信息。
12、可选的,构建模块还用于:根据预设测试方案,构建天气环境仿真场景、道路仿真场景和车流仿真场景;结合天气环境仿真场景、道路仿真场景和车流仿真场景,确定仿真测试场景。
13、可选的,仿真模块还用于:建立当前位置信息和当前位姿信息与虚拟位置和虚拟位姿的对应关系;根据虚拟位置和虚拟位姿,在仿真测试场景中仿真得到虚拟仿真车辆。
14、可选的,投影模块还用于:根据当前位置信息、当前位姿信息和预设投影参数,确定投影初始位置和投影初始位姿;根据投影初始位置和投影初始位姿,在真实车辆所在区域构建障碍车辆投影。
15、可选的,投影模块还用于:根据预设投影参数和预设三维渲染模型,确定三维车辆投影信息;根据三维车辆投影信息、投影初始位置和投影初始位姿,在真实车辆所在区域进行投影得到障碍车辆投影。
16、可选的,控制模块还用于:根据虚拟雷达感知信息和摄像头感知信息,利用预设决策模型确定车辆决策;根据车辆决策确定真实车辆控制信号;根据真实车辆控制信号控制真实车辆运行。
17、根据本发明实施例的第三方面,还提供了一种电子设备,包括存储器和处理器,存储器中存储有计算机程序,处理器被设置为运行计算机程序以执行上述第一方面任一实施例中所述的车辆在环仿真测试方法。
18、根据本发明实施例的第四方面,还提供了一种非易失性存储介质,非易失性存储介质中存储有计算机程序,其中,计算机程序被设置为在计算机或处理器上运行时,执行上述第一方面任一实施例中所述的车辆在环仿真测试方法。
19、在本发明实施例中,获取真实车辆的当前位置信息与当前位姿信息;根据预设测试方案,构建仿真测试场景;响应于仿真测试开始信号,根据当前位置信息和当前位姿信息,将真实车辆同步仿真至仿真测试场景得到虚拟仿真车辆,其中,虚拟仿真车辆包括虚拟雷达;根据当前位置信息和当前位姿信息,在真实车辆所在区域构建障碍车辆投影;获取虚拟雷达感知信息和摄像头感知信息,其中,虚拟雷达感知信息通过虚拟雷达感知仿真测试场景得到,摄像头设置于真实车辆,摄像头感知信息通过摄像头感知障碍车辆投影得到;根据虚拟雷达感知信息和摄像头感知信息控制真实车辆运行。通过在真实车辆前构建障碍车辆投影,使仿真测试过程中,虚拟雷达在感知仿真测试场景的同时,真实的摄像头感知障碍物投影,真实摄像头直接感知的信息更加准确,同时不再需要对摄像头进行虚拟测试用例注入,进而可以解决虚拟测试用例注入失败,仿真测试过程受到影响的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!