一种自由面港内耦合水动力的船舶运动预报方法及预报系统
本发明涉及船舶运动预报,具体是涉及一种自由面港内耦合水动力的船舶运动预报方法及预报系统。
背景技术:
1、船舶在自由面港口中的运动比在开放水域中的运动要复杂得多,因为除了船舶固有频率外,港口自身也存在固有频率,这可能会导致漂浮在自由面港口内的船舶产生大幅度的运动响应。此时可能会影响货物装卸效率,甚至对港口或船舶安全性构成威胁。因此,准确预测船舶在自由面港口内的运动行为具有重要意义。
2、已有许多学者对自由面港口内波浪运动做出了大量研究,主要分为两类:一是偏向于波浪/自由面港口的相互作用。二是采用域分解法研究漂浮在自由面港口内物体的运动。此外,自由面港内船舶与波浪相互作用问题,主要集中在如何为港口内自由漂浮的船舶提供精确解的问题。然而对于波浪与港口内船舶耦合水动力及船舶运动机理、水波散射特性等研究相对匮乏,其内尚有诸多水动力现象与机理未被掲示,同时存在着计算量大计算复杂等问题。因此需要一种更简单的域分解方法来解决波浪、自由面港口和港内自由漂浮船舶相互作用的问题。
3、当前,对于应用较多的基于格林函数rankine源和自由面格林函数的单流域法是比较传统的三维船舶运动预报方法,应用场景比较局限,不适用于大型自由面港内的船舶水动力特性分析,以及无法实现有效实现港内船舶运动预报。
技术实现思路
1、发明目的:针对以上问题,本发明提供一种确保船舶在自由面港内作业安全的自由面港内耦合水动力的船舶运动预报方法及预报系统。
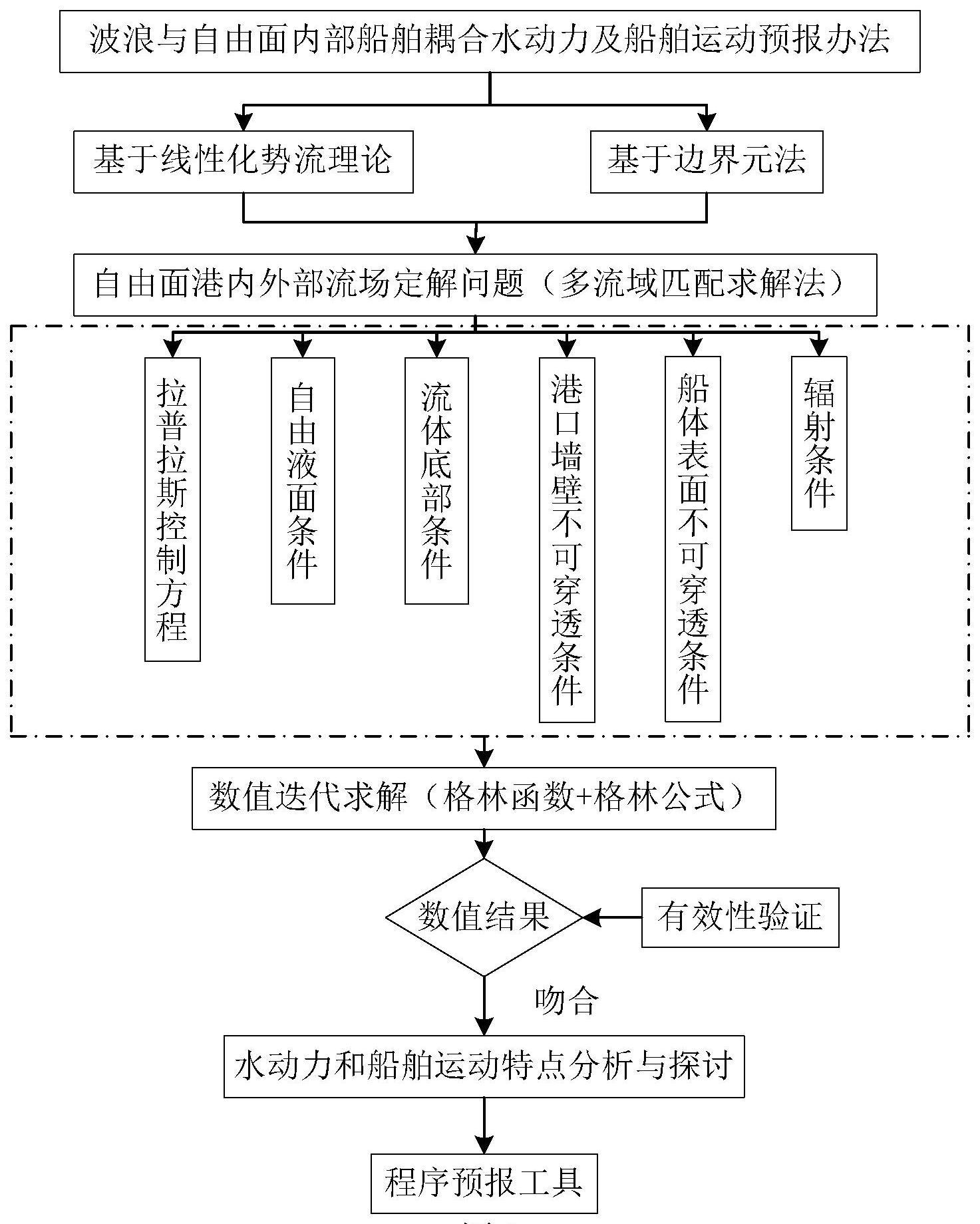
2、技术方案:为解决上述问题,本发明采用一种自由面港内耦合水动力的船舶运动预报方法,包括以下步骤:
3、(1)对自由面港的流域进行分解,分解为自由面港内部子域和自由面港外部子域,基于线性势流理论给出满足自由面港整个流域的速度势拉普拉斯控制方程和边界条件,并在自由面港内部子域和自由面港外部子域的边界面上施加匹配条件以确保速度和压力的连续性;
4、(2)利用格林公式与格林函数,分别构建自由面港内部子域和自由面港外部子域的边界积分方程;
5、(3)将自由面港内部子域和自由面港外部子域的边界离散成单元,同时求解所有单元上的速度势,根据得到的速度势通过线性化的伯努利方程获得压力;
6、(4)根据获得的压力,通过对船体湿表面上的压力进行积分计算作用在船体上的水动力;
7、(5)根据作用在船体上的水动力得到船舶的六自由度运动方程,根据得到的船舶运动方程对船舶运动进行预报。
8、进一步的,所述步骤(1)中:自由面港整个流域的速度势为:
9、
10、其中,re为实部;i为虚数单位;ω为原频率;(x,y,z)为以自由面港内部子域和自由面港外部子域交界面一点为原点的坐标系;t为时刻;(x′,y′,z′)为以船体中心为原点的坐标系;为散射势;为辐射势;j=1,2,3分别对应于船体x′,y′,z′三个方向上的平移运动;j=4,5,6分别对应于船体绕x′,y′,z′三个方向上的旋转运动;为船体运动第j模态下的复振幅;
11、速度势在自由面港整个流域中满足拉普拉斯方程:
12、。
13、进一步的,所述步骤(1)中的边界条件包括:
14、自由表面的边界条件sf为:
15、
16、其中,ν=ω2/g,g是重力加速度;
17、流体底部的边界条件sb为:
18、。
19、进一步的,在自由面港内部子域,港口墙壁的不可穿透条件sw为:
20、
21、其中,n表示曲面的向外单位法向量;
22、船体表面的边界条件sh表示为:
23、
24、其中为船体表面单位法向量,
25、(n1,n2,n3)=(nx′,ny′,nz′)and(n4,n5,n6)=(x′,y′,z′)×(nx′,ny′,nz′);
26、在自由面港外部子域,满足自由表面的边界条件sf;海岸墙的边界条件sy为沿着y轴延伸到无穷远,表示为:
27、
28、此时,速度势也满足在无穷远处上的辐射条件sr,表示为:
29、
30、其中,r2=x2+y2,k0是以下色散方程的纯正实根:
31、k0tanh(k0h)=v
32、其中,h为水深。在自由面港内部子域与自由面港外部子域的交界面sa上的x=0处,保证速度和压力的连续性的连续性条件为:
33、
34、其中,为自由面港内部子域的辐射势;为自由面港外部子域的辐射势。
35、进一步的,在自由面港内部子域,根据格林函数将流域中的拉普拉斯方程转化为边界积分方程,即:
36、
37、其中,α(1)(p)是自由面港内部子域中场点p(x,y,z)处的立体角,在源点q(ξ,η,ζ)处积分,g(1)(p,q)是自由面港内部子域中的格林函数。
38、进一步的,在自由面港外部子域,根据格林函数得到的边界积分方程为:
39、
40、其中,α(2)(pa)是自由面港外部子域中场点pa的固角系数,场点pa位于交界面sa上。
41、进一步的,自由面港内部子域的边界积分方程离散成单元后的方程为:
42、
43、其中,n是单元总数,sm是单元m的表面;
44、自由面港外部子域的边界积分方程离散成单元后的方程为:
45、
46、其中,na是单元总数。
47、进一步的,所述步骤(4)中作用在船体上的水动力包括波浪激励力和辐射力;波浪激励力fj计算公式为:
48、
49、其中,ρ0表示流体密度;
50、辐射力可以写成附加质量ajk和阻尼系数bjk公式为:
51、
52、进一步的,船舶运动三维复数幅值ηj可通过浮体六自由度运动方程求得:
53、
54、其中,k表示第k个自由度,mjk为质量系数,cjk为静水恢复力系数。
55、本发明还采用一种船舶运动预报系统,包括第一机构单元、第二机构单元和预报机构单元;所述第一机构单元用于对自由面港的流域进行分解,分解为自由面港内部子域和自由面港外部子域,基于线性势流理论给出满足自由面港整个流域的速度势拉普拉斯控制方程和边界条件,并在自由面港内部子域和自由面港外部子域的边界面上施加匹配条件以确保速度和压力的连续性;且利用格林公式与格林函数,分别构建自由面港内部子域和自由面港外部子域的边界积分方程;所述第二机构单元用于将自由面港内部子域和自由面港外部子域的边界离散成单元,同时求解所有单元上的速度势,根据得到的速度势通过线性化的伯努利方程获得压力;并根据获得的压力,通过对船体湿表面上的压力进行积分计算作用在船体上的水动力,根据作用在船体上的水动力得到船舶的六自由度运动方程;所述预报机构单元用于根据得到的船舶运动方程对船舶运动进行预报。
56、有益效果:本发明相对于现有技术,其显著优点是基于流域分解法,结合格林函数法,考虑了船、波浪、自由面港口三者耦合作用下的水动力问题,在整个计算频率范围内,对自由面港口内船舶的水动力和运动的预测也能够实现的较高的数值精度。同时,该预报方法的使用也很大程度上提高了计算效率。
- 还没有人留言评论。精彩留言会获得点赞!