基于计算机视觉的灯丝质量智能检测方法与流程
本发明涉及灯丝照明,具体涉及一种基于计算机视觉的灯丝质量智能检测方法。
背景技术:
1、灯丝是电子器件中常用的电子元件之一,它在电路中起着导电、连接等作用。在灯丝安装过程中受一些外力作用的影响,灯丝容易发生弯曲或扭曲变形,弯曲的灯丝可能会影响其使用寿命和性能稳定性,导致不能正常工作。因此,需要检查灯丝的结构有无缺陷,具体为察看灯丝是否弯曲。
2、现有通常利用图像配准法检测灯丝是否发生弯曲变形,具体为采集的待检测灯丝图像与预设的模板图像的像素分布情况进行比较,从而判断灯丝是否存在质量问题。虽然图像配准法可以通过一个合适的多项式拟合两个图像之间的平移和旋转,但是受采集图像设备的影响,平移和旋转变换容易造成图像畸变,图像畸变改变了待检测灯丝图像中目标物体的像素分布。此时,再进行多项式拟合时会出现部分像素点无法对应的情况,导致图像矫正效果不佳,影响灯丝质量检测结果的准确性。
技术实现思路
1、为了解决上述灯丝质量检测结果的准确性较差的技术问题,本发明的目的在于提供一种基于计算机视觉的灯丝质量智能检测方法,所采用的技术方案具体如下:
2、本发明一个实施例提供了一种基于计算机视觉的灯丝质量智能检测方法,该方法包括以下步骤:
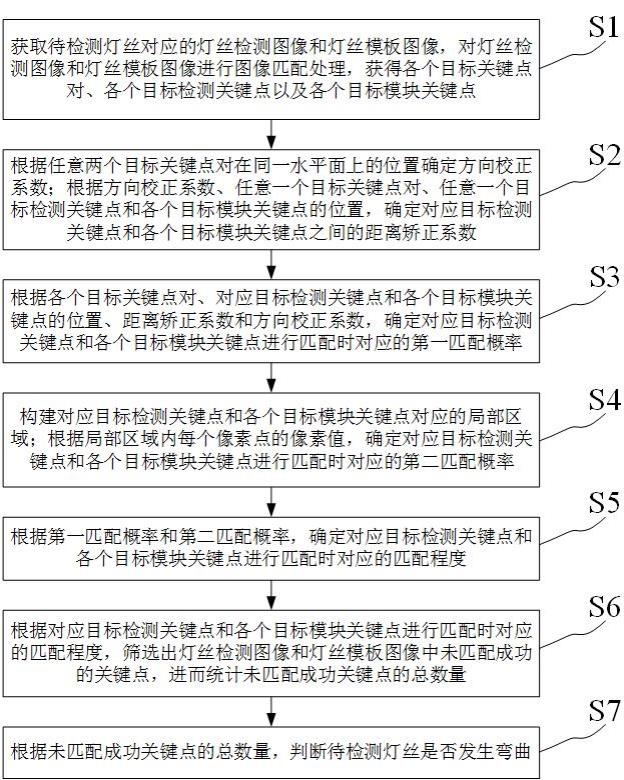
3、获取待检测灯丝对应的灯丝检测图像和灯丝模板图像,对所述灯丝检测图像和灯丝模板图像进行图像匹配处理,获得各个目标关键点对、各个目标检测关键点以及各个目标模块关键点;
4、根据任意两个目标关键点对在同一水平面上的位置确定方向校正系数;根据方向校正系数、任意一个目标关键点对、任意一个目标检测关键点和各个目标模块关键点的位置,确定对应目标检测关键点和各个目标模块关键点之间的距离矫正系数;
5、根据各个目标关键点对、对应目标检测关键点和各个目标模块关键点的位置、距离矫正系数和方向校正系数,确定对应目标检测关键点和各个目标模块关键点进行匹配时对应的第一匹配概率;
6、构建对应目标检测关键点和各个目标模块关键点对应的局部区域;根据所述局部区域内每个像素点的像素值,确定对应目标检测关键点和各个目标模块关键点进行匹配时对应的第二匹配概率;
7、根据所述第一匹配概率和所述第二匹配概率,确定对应目标检测关键点和各个目标模块关键点进行匹配时对应的匹配程度;
8、根据对应目标检测关键点和各个目标模块关键点进行匹配时对应的匹配程度,筛选出灯丝检测图像和灯丝模板图像中未匹配成功的关键点,进而统计未匹配成功关键点的总数量;
9、根据所述未匹配成功关键点的总数量,判断待检测灯丝是否发生弯曲。
10、进一步地,所述目标关键点对为灯丝检测图像中关键点和灯丝模板图像中与其相匹配的匹配关键点构成的关键点对;所述目标检测关键点为灯丝检测图像中初次匹配未匹配成功的关键点;所述目标模块关键点为灯丝模板图像中初次匹配未匹配成功的关键点。
11、进一步地,根据任意两个目标关键点对在同一水平面上的位置确定方向校正系数,包括:
12、根据任意两个目标关键点对在同一水平面上的位置,确定对应两个目标关键点对之间的距离,进而计算对应两个目标关键点之间的距离的比值,利用反正切函数对所述比值进行数据处理,将反正切函数处理后的比值确定为方向矫正系数。
13、进一步地,所述距离矫正系数的计算公式为:
14、
15、其中,为灯丝检测图像中初次匹配未匹配成功的关键点与灯丝模板图像中初次匹配未匹配成功的关键点之间的距离矫正系数,为方向校正系数,为方向校正系数的正弦值,为灯丝检测图像中匹配成功的关键点与未匹配成功的关键点之间的距离,为灯丝模板图像中匹配成功的关键点与未匹配成功的关键点之间的距离,为方向校正系数的余弦值。
16、进一步地,所述第一匹配概率的计算公式为:
17、
18、其中,为灯丝检测图像中初次匹配未匹配成功的关键点与灯丝模板图像中初次匹配未匹配成功的关键点进行匹配时对应的第一匹配概率,n为灯丝检测图像中匹配成功的关键点的数量,j为匹配成功的关键点的序号,为灯丝检测图像中第j个匹配成功的关键点与灯丝模板图像中第j个匹配成功的关键点之间的距离,灯丝检测图像中第j个匹配成功的关键点在灯丝模板图像中的匹配关键点为,为灯丝检测图像中第j个匹配成功的关键点与灯丝模板图像中第j个匹配成功的关键点之间的连线与水平方向的夹角,为180度,为灯丝检测图像中初次匹配未匹配成功的关键点与灯丝模板图像中初次匹配未匹配成功的关键点之间的距离,为灯丝检测图像中初次匹配未匹配成功的关键点与灯丝模板图像中初次匹配未匹配成功的关键点之间的距离矫正系数,为灯丝检测图像中初次匹配未匹配成功的关键点与灯丝模板图像中初次匹配未匹配成功的关键点之间的连线与水平方向的夹角,为方向校正系数,exp为指数函数。
19、进一步地,根据所述局部区域内每个像素点的像素值,确定对应目标检测关键点和各个目标模块关键点进行匹配时对应的第二匹配概率,包括:
20、对于对应目标检测关键点和任意一个目标模块关键点,对目标检测关键点和目标模块关键点对应的局部区域进行边缘检测,获得所述局部区域内的边缘像素点个数和相邻边缘像素点的连线斜率;
21、将目标检测关键点对应的局部区域内的边缘像素点个数与目标模块关键点对应的局部区域内的边缘像素点个数之间的差值,确定为对应目标检测关键点的第一差值;
22、将目标检测关键点对应的局部区域内所有连线斜率的累加和确定为第一累加和,将目标模块关键点对应的局部区域内所有连线斜率的累加和确定为第二累加和,将所述第一累加和与所述第二累加和之间的差值,确定为对应目标检测关键点的第二差值;
23、将目标检测关键点对应的局部区域内所有像素点的像素值的平均值确定为第一像素平均值,将目标模块关键点对应的局部区域内所有像素点的像素值的平均值确定为第二像素平均值,将所述第一像素平均值与所述第二像素平均值之间的差值,确定为对应目标检测关键点的第三差值;
24、计算对应目标检测关键点的第一差值、第二差值和第三差值的乘积,将所述乘积的绝对值进行反比例的归一化处理,将反比例归一化处理后的数值确定为对应目标检测关键点和对应目标模块关键点进行匹配时对应的第二匹配概率。
25、进一步地,根据所述第一匹配概率和所述第二匹配概率,确定对应目标检测关键点和各个目标模块关键点进行匹配时对应的匹配程度,包括:
26、对于对应目标检测关键点和任意一个目标模块关键点,计算目标检测关键点和目标模块关键点进行匹配时第一匹配概率和第二匹配概率的乘积,将所述第一匹配概率和第二匹配概率的乘积确定为对应目标检测关键点和对应目标模块关键点进行匹配时对应的匹配程度。
27、进一步地,根据对应目标检测关键点和各个目标模块关键点进行匹配时对应的匹配程度,筛选出灯丝检测图像和灯丝模板图像中未匹配成功的关键点,包括:
28、将对应目标检测关键点和各个目标模块关键点进行匹配时对应的匹配程度与最小匹配程度阈值进行比对;若任意一个匹配程度大于最小匹配程度阈值,则将最大匹配程度对应的目标模块关键点确定为对应目标检测关键点的匹配关键点,否则,将对应目标检测关键点确定为灯丝检测图像中未匹配成功的关键点;
29、对灯丝检测图像和灯丝模板图像中匹配成功的关键点进行标记,剔除灯丝检测图像和灯丝模板图像中的标记关键点,将灯丝检测图像和灯丝模板图像中的剩余关键点确定为未匹配成功的关键点。
30、进一步地,根据所述未匹配成功关键点的总数量,判断待检测灯丝是否发生弯曲,包括:
31、若未匹配成功关键点的总数量大于关键点数量阈值,则判定待检测灯丝发生弯曲,否则,判定待检测灯丝没有发生弯曲。
32、进一步地,构建对应目标检测关键点和各个目标模块关键点对应的局部区域,包括:
33、对于目标检测关键点,以对应目标检测关键点为中心,构建中心对应的预设尺寸的窗口区域,将所述窗口区域确定为对应目标检测关键点的局域区域,从而获得对应目标检测关键点和各个目标模块关键点对应的局部区域。
34、本发明具有如下有益效果:
35、本发明提供了一种基于计算机视觉的灯丝质量智能检测方法,该方法通过分析灯丝检测图像中初次匹配时对应的各个目标检测关键点以及各个目标模块关键点之间的图像特征信息,获得每个目标检测关键点和各个目标模块关键点进行匹配时对应的匹配程度,根据匹配程度对灯丝检测图像中初次匹配时未匹配成功的关键点再次进行匹配,获得未匹配成功关键点的总数量,进而判断待检测灯丝是否发生弯曲,主要应用于灯丝质量检测领域。相比现有图像配准法,本发明确定的方向校正系数和距离矫正系数,有效提升了灯丝检测图像的矫正效果;通过方向校正系数和距离矫正系数获得的第一匹配概率,可以更准确地描述发生偏移或旋转的灯丝模板图像中的各个目标模块关键点为灯丝检测图像中目标检测关键点的匹配关键点的可能性;确定第二匹配概率可以有效克服灯丝检测图像中目标物体像素分布发生改变而导致匹配准确性降低的缺陷;从两个角度分析对应目标检测关键点和各个目标模块关键点进行匹配时对应的匹配程度,即第一匹配概率和第二匹配概率,有助于提高匹配程度的精准性;更精准的匹配程度,可以获得更准确的未匹配成功关键点的总数量,通过更准确的未匹配成功关键点的总数量,判断待检测灯丝是否发生弯曲,提高了灯丝质量检测结果的准确性。
- 还没有人留言评论。精彩留言会获得点赞!