一种用于光钟物理部分的探测光学系统的隔振系统设计方法与流程
本发明涉及光钟隔振,具体来说为一种应用于光钟物理部分的探测光学系统的隔振系统设计方法。
背景技术:
1、目前测量精度最高的物理量是时间(频率),铯原子喷泉钟定义了其现行的国际制单位“秒”。而近十多年来,利用中性原子或离子内禀高q值的光频跃迁研制的光学原子钟(以下简称为光钟)也备受关注,实现了快速发展,有望为“秒”单位提供更具有更好频率稳定度的定义方案。目前光钟的稳定性水平已超越了原子喷泉钟,频率不确定度进入10-19量级。
2、对可移动光钟而言,移动平台及外界环境的振动噪声是影响光钟物理部分的探测光学系统的工作性能的重要因素,振动对光钟的影响主要包括对激光参考腔的影响和对原子冷却光路的影响,是限制光钟频率稳定度的重要因素。
3、因此为了使可移动光钟的稳定度满足设计要求,应对光钟物理部分的探测光学系统基座的振动情况提出约束,对移动平台的振动噪声进行详细分析,建立从平台的振动加速度到探测光学系统的出光光束偏转角的定量关系,设计合适的隔振系统,以尽可能减小移动平台振动对探测光学系统的影响。隔振系统可以分为水平隔振系统和垂直隔振系统,从原理上继续细分为被动式和主动式,理论上可以通过合理设计实现以光钟为负载的三维隔振系统。但目前国内外尚无针对可移动光钟物理部分的探测光学系统的隔振系统。
4、基于以上原因,本发明设计了一种用于光钟物理部分的探测光学系统的隔振系统设计方法,通过对计算和仿真隔振系统环境输入和输出指标并进行验证,实现实际隔振系统的设计、搭建、调试和优化,有利于提高可移动光钟的长期稳定性。
技术实现思路
1、本发明目的为通过克服现有技术的不足,提供一种用于光钟物理部分的探测光学系统的隔振系统设计方法,通过对计算和仿真隔振系统环境输入和输出指标并进行验证,实现实际隔振系统的设计、搭建、调试和优化,有利于提高可移动光钟的长期稳定性。
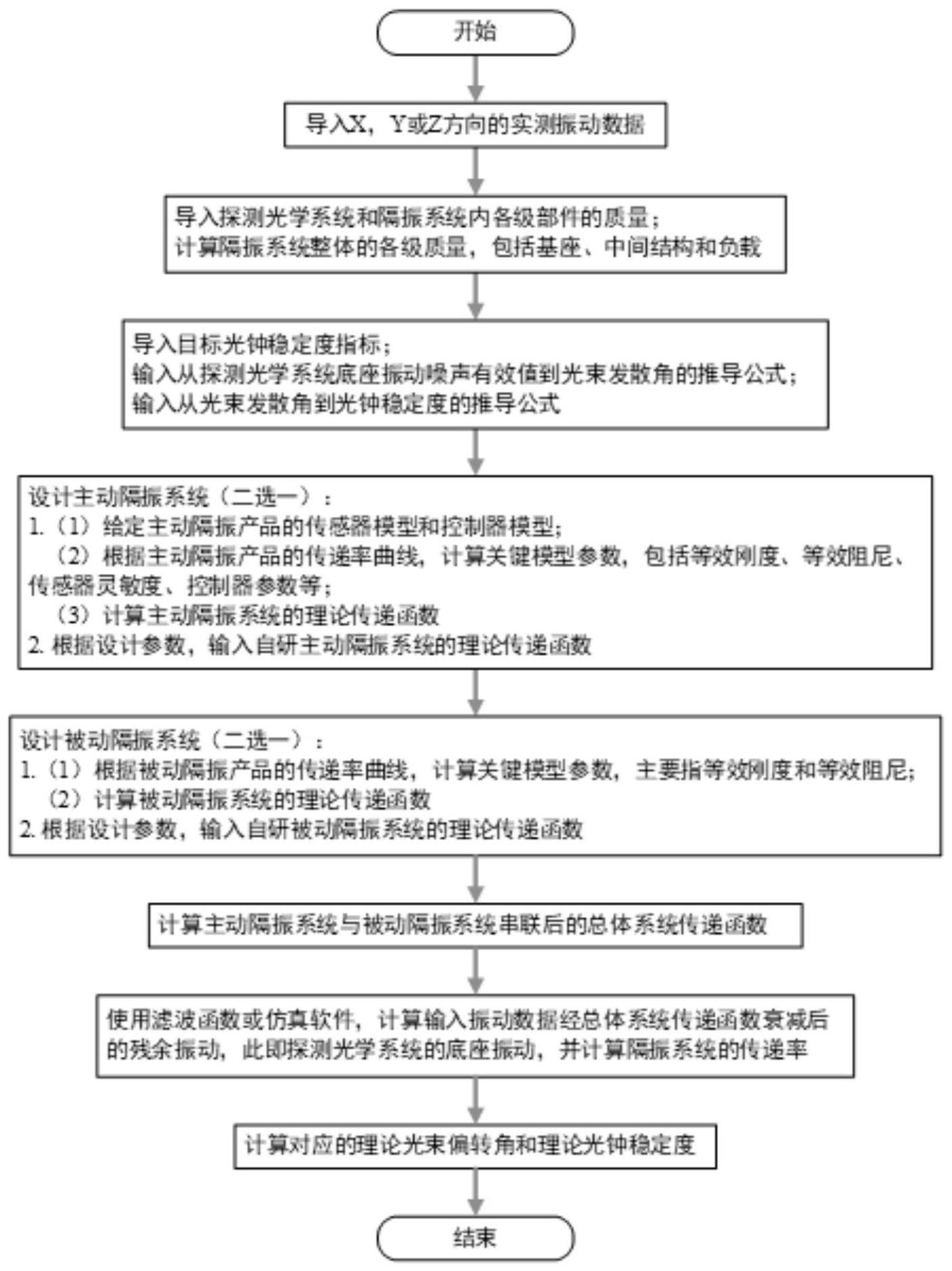
2、为了达到上述目的,本发明提供一种用于光钟物理部分的探测光学系统的隔振系统设计方法,包括以下步骤:
3、a、分析隔振系统的输出指标:
4、s1,对超稳光学系统进行建模和前处理,通过有限元分析软件计算出系统的结构模态和特定振动输入下系统及其内各光学元件的结构变形;
5、s2,基于主要光学元件的微小位移及偏转,利用光学分析软件求解出光口处的光束偏转角;
6、s3,实测出光钟频率漂移随光束偏转角的变化曲线,在曲线上找出可移动光钟的稳定度达到目标值时对应的光束偏转角;
7、b、获取隔振系统的背景振动输入:使用振动传感器测量可移动光钟的目标工作环境的背景振动噪声,传感器为三轴布置,同时测量水平和垂直方向的单轴振动,测试过程中平台内应按照光钟的目标工作环境进行质量布置,具体步骤如下:
8、s4,确定待测位置:如果光钟的放置位置确定,则直接测量该处的振动噪声;如果位置不定,挑选出若干待定的位置,分别测量其振动噪声,选取其中噪声最小的位置作为光钟的放置处;
9、s5,确定环境振源状态:一般情况下光钟工作时需要恒温环境,因此其所在的移动平台上有必要包含空调等控温设备,这些设备都将作为振源产生影响,应测量并对比振源关闭或开启、以及振源改变时的振动噪声作为隔振系统设计的依据;
10、s6,确定平台运动状态:一般情况下光钟仅在平台静止时工作,因此只需测量此时的振动噪声,如果将光钟放置在无法静止的平台上,仍需测量平台按照规定要求缓慢移动时的振动噪声;
11、振动噪声测量应重复多次,以测量结果的平均值为计算依据;获取所需的背景振动噪声信号后,以振动加速度幅值的有效值作为隔振系统设计的输入参数,如有特殊要求,也可以采用其他定量化指标;
12、在已知全部振源及其振动特征的精确值的情况下,也可以直接对移动平台进行有限元分析,计算或仿真得到隔振系统所在工作背景的振动输入,不必进行实际测量;
13、c、设计隔振系统的组合方案:
14、依据a~b获取的数据,计算符合小角度近似规则的条件下,可移动光钟超稳光学系统中的光束在水平及垂直方向上的偏转角的最大值θ和光钟放置位置的振动噪声有效值a之间的比例系数(k=θ/a);因此,当光束偏转角达到目标值θo时,光钟基座的振动噪声有效值应为(ao=θo/k);
15、根据b步骤获得的振动噪声测量结果,取所有轴向上、每次测试过程中出现的最大振动噪声有效值为不使用隔振系统时光钟可能遇到的最大振动噪声,记为ai;
16、由此可得隔振系统对机械振动有效值的传递率应为(t=20×log10(ao/ai));
17、使用商用或自研的三维隔振系统同时实现三个轴向上的目标传递率;
18、d、计算隔振系统的关键参数和理论隔振效果:
19、分别在三个轴向上计算单轴隔振系统的系统参数,放置在顶部平板上的传感器对平台相对于惯性系的绝对加速度信号进行探测,输出的电压信号进入控制器中,音圈电机根据该控制器的输出对顶部平台施加作用力f(t),抑制其绝对位移zout(t);
20、易得被隔振物体的运动方程为:
21、
22、对上式进行拉普拉斯变换,可得:
23、m1s2zout(s)+β1szout(s)+k1zout(s)=β1szin(s)+k1zin(s)+f(s)
24、不施加反馈力f的情况下,系统等效于原被动式隔振系统,相应的开环传递函数为
25、
26、施加反馈力f的情况下,反馈力为
27、f(s)=-ga(s)h(s)kdrive·s2zout(s)
28、可得系统的闭环传递函数为
29、
30、假设此时被隔振物体的质量为m2、等效弹簧的刚度和阻尼分别为其传递函数为k1和β1,可以得到该系统的传递函数为
31、
32、其中,地面输入的振动位移为zin(t),被隔振物体及与其固连的所有物体的振动位移为zout(t)、总质量为m1,支撑弹簧的等效刚度为k1、等效阻尼为β1;
33、ga(s)为传感器自身的传递函数,h(s)为控制器的传递函数,kdrive为驱动器的力常数;
34、先将系统整体转换为一个物理模型,列写被隔振物体的运动方程,得到系统整体的传递函数;
35、采用加速度计作为振动传感器时上述传递函数将发生变化,但计算流程不变;使用其他隔振产品或自研隔振系统时,可以通过测定系统的谐振周期、阻尼比、加速度功率谱密度等手段得到上述参数值,进行定量计算;
36、可以直接用软件计算所设计的单轴隔振系统的理论隔振效果,以实测的背景振动噪声数据为输入ai,通过计算软件计算隔振后的振动噪声ao,可以判断系统的传递率t是否满足设计要求,进而推算出此时光钟物理部分的探测光学系统的光束偏转角和光钟的频率稳定度;
37、e、通过仿真优化隔振系统的设计结果:
38、通过仿真计算单轴和三轴上的隔振效果,仍以实测的背景振动噪声数据为输入ai,通过仿真软件计算隔振后的振动噪声ao,可以判断单轴上隔振系统的传递率t是否满足设计要求,进而推算出此时光钟物理部分的探测光学系统的光束偏转角和光钟的频率稳定度;仿真分析的好处是能够通过较为简单的过程直接将单轴隔振系统的仿真模型改造为三维隔振系统的仿真模型,进而完成传递率t的计算;
39、如果仿真得到的系统的传递率不符合要求,可以通过更改设计参数持续优化,指导满足要求为止;
40、f、设计、搭建、调试实际的隔振系统样机:
41、完成上述a~e个步骤后即可开始采购商用隔振产品和各类配件,或自行设计隔振系统;完成系统搭建后将光钟物理部分的探测光学系统固定在系统的被隔振平台上,调试系统的机械参数和控制参数;使用振动台测量隔振系统的传递率,判断其是否满足设计要求,不满足则继续优化参数或更改设计方案;最后在目标移动平台如测试车上进行试验,考察探测光学系统的光束偏转角和光钟的频率稳定度是否满足设计要求,不满足则重复隔振系统的优化过程。
42、本发明同现有技术相比,解决了现有技术中尚未有应用于可移动光钟物理部分的探测光学系统的隔振系统,通过对计算和仿真隔振系统环境输入和输出指标并进行验证,实现实际隔振系统的设计、搭建、调试和优化,有利于提高可移动光钟的长期稳定性。
- 还没有人留言评论。精彩留言会获得点赞!