基于高精点云的隔离开关分合状态识别方法及相关装置与流程
本发明涉及图像处理领域,尤其涉及一种基于高精点云的隔离开关分合状态识别方法及相关装置。
背景技术:
1、隔离开关是否分合闸到位对于输配电安全以及电网稳定运行至关重要,随着电网数字化、智能化操作模式的推广,日常智能巡检、一键顺控等应用场景对于隔离开关的智能识别提出了更高的要求。
2、目前,变电站/换流站的隔离开关分合通过辅助遥信信号用于指示分合位置,基于此单一判据,容易出现隔离开关分合状态的误报,而第二判据主要依靠人工眼识别、可见光照片算法识别、基于点云数据的深度学习识别算法等。人工识别需要人员在现场利用肉眼或者望远镜进行观测,人工只是简单判断,耗费人工且精度不好保证;基于可见光照片算法识别受图像采集的角度、光照和环境影响,尤其是夜晚,识别准确率普遍不高,已达到技术瓶颈;基于点云数据的深度学习算法,对于点云的精度要求非常高,否则会出现误判,此外,该方法还需要前期采集大量的数据采集、标注和模型训练工作,不太适合电网中种类繁多的隔离开关的推广使用。为提高变电站智能化操作及第二判据的准确性和便捷性,亟需寻找新的技术手段来解决。
技术实现思路
1、本发明提供了一种基于高精点云的隔离开关分合状态识别方法及相关装置,用于提高对隔离开关分合状态识别的准确率。
2、本发明第一方面提供了一种基于高精点云的隔离开关分合状态识别方法,所述基于高精点云的隔离开关分合状态识别方法包括:
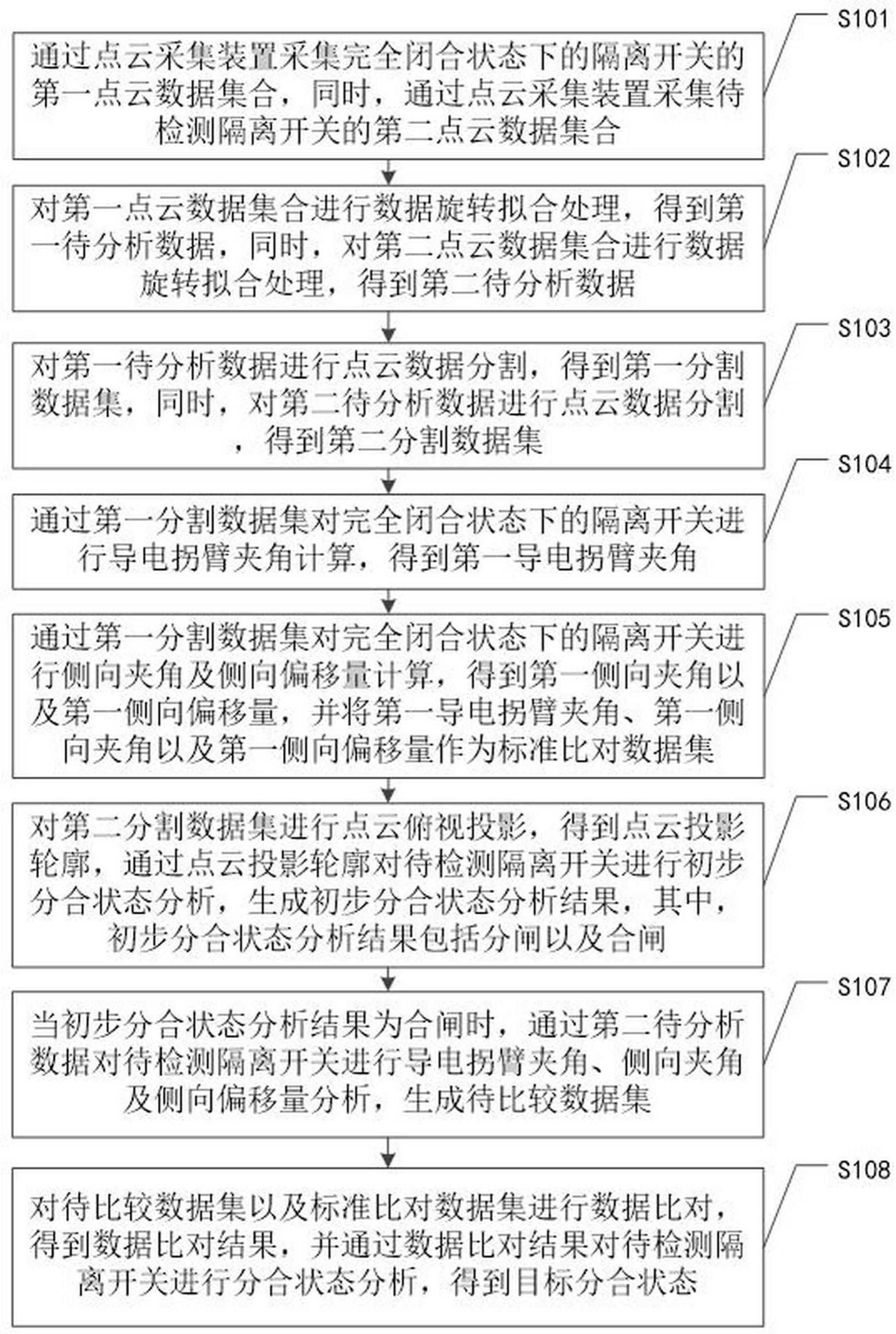
3、通过点云采集装置采集完全闭合状态下的隔离开关的第一点云数据集合,同时,通过所述点云采集装置采集待检测隔离开关的第二点云数据集合;
4、对所述第一点云数据集合进行数据旋转拟合处理,得到第一待分析数据,同时,对所述第二点云数据集合进行数据旋转拟合处理,得到第二待分析数据;
5、对所述第一待分析数据进行点云数据分割,得到第一分割数据集,同时,对所述第二待分析数据进行点云数据分割,得到第二分割数据集;
6、通过所述第一分割数据集对所述完全闭合状态下的隔离开关进行导电拐臂夹角计算,得到第一导电拐臂夹角;
7、通过所述第一分割数据集对所述完全闭合状态下的隔离开关进行侧向夹角及侧向偏移量计算,得到第一侧向夹角以及第一侧向偏移量,并将所述第一导电拐臂夹角、所述第一侧向夹角以及所述第一侧向偏移量作为标准比对数据集;
8、对所述第二分割数据集进行点云俯视投影,得到点云投影轮廓,通过所述点云投影轮廓对所述待检测隔离开关进行初步分合状态分析,生成初步分合状态分析结果,其中,所述初步分合状态分析结果包括分闸以及合闸;
9、当所述初步分合状态分析结果为合闸时,通过所述第二待分析数据对所述待检测隔离开关进行导电拐臂夹角、侧向夹角及侧向偏移量分析,生成待比较数据集;
10、对所述待比较数据集以及所述标准比对数据集进行数据比对,得到数据比对结果,并通过所述数据比对结果对所述待检测隔离开关进行分合状态分析,得到目标分合状态。
11、结合第一方面,在本发明第一方面的第一实施方式中,所述对所述第一点云数据集合进行数据旋转拟合处理,得到第一待分析数据,同时,对所述第二点云数据集合进行数据旋转拟合处理,得到第二待分析数据,包括:
12、对所述第一点云数据集合进行拟合角度分析,生成第一拟合角度;
13、通过所述第一拟合角度对所述第一点云数据集合进行数据旋转拟合处理,得到第一待分析数据;
14、对所述第二点云数据集合进行拟合角度分析,生成第二拟合角度;
15、通过所述第二拟合角度对所述第二点云数据集合进行数据旋转拟合处理,得到第二待分析数据。
16、结合第一方面,在本发明第一方面的第二实施方式中,所述对所述第一待分析数据进行点云数据分割,得到第一分割数据集,同时,对所述第二待分析数据进行点云数据分割,得到第二分割数据集,包括:
17、对所述第一待分析数据进行点云数据分割,得到第一分割数据集,其中,所述第一分割数据集包括:第一隔离柱点云数据、第一导电拐臂点云数据、第一导电拐臂的左半支点云数据以及第一导电拐臂的右半支点云数据;
18、对所述第二待分析数据进行点云数据分割,得到第二分割数据集,其中,所述第二分割数据集包括:第二隔离柱点云数据、第二导电拐臂点云数据、第二导电拐臂的左半支点云数据以及第二导电拐臂的右半支点云数据。
19、结合第一方面的第二实施方式,在本发明第一方面的第三实施方式中,所述通过所述第一分割数据集对所述完全闭合状态下的隔离开关进行导电拐臂夹角计算,得到第一导电拐臂夹角,包括:
20、基于所述第一点云数据集合,将所述第一导电拐臂的左半支点云数据以及所述第一导电拐臂的右半支点云数据投影至预设的立体坐标系的第一平面中,得到第一点云投影图像;
21、通过所述点云投影图像计算所述完全闭合状态下的隔离开关的导电拐臂左半支与所述立体坐标系的x轴的夹角,得到左半支夹角,同时,通过所述点云投影图像计算所述完全闭合状态下的隔离开关的导电拐臂右半支与所述立体坐标系的x轴的夹角,得到右半支夹角;
22、通过所述左半支夹角以及所述右半支夹角进行导电拐臂夹角计算,得到第一导电拐臂夹角。
23、结合第一方面的第二实施方式,在本发明第一方面的第四实施方式中,所述通过所述第一分割数据集对所述完全闭合状态下的隔离开关进行侧向夹角及侧向偏移量计算,得到第一侧向夹角以及第一侧向偏移量,并将所述第一导电拐臂夹角、所述第一侧向夹角以及所述第一侧向偏移量作为标准比对数据集,包括:
24、基于所述第一点云数据集合,将所述第一导电拐臂点云数据以及所述第一隔离柱点云数据投影至预设的立体坐标系的第二平面中,得到第二点云投影图像;
25、通过所述第二点云投影图像计算所述完全闭合状态下的隔离开关的导电拐臂与所述立体坐标系的x轴的夹角,得到x轴夹角,同时,通过所述第二点云投影图像计算所述完全闭合状态下的隔离开关的隔离柱中心连线与所述立体坐标系的x轴的夹角,得到隔离柱夹角;
26、通过所述x轴夹角、所述隔离柱夹角以及两个隔离柱的距离对所述完全闭合状态下的隔离开关进行侧向夹角及侧向偏移量计算,得到第一侧向夹角以及第一侧向偏移量,其中,两个隔离柱的距离根据隔离开关的型号确定;
27、将所述第一导电拐臂夹角、所述第一侧向夹角以及所述第一侧向偏移量作为标准比对数据集。
28、结合第一方面的第二实施方式,在本发明第一方面的第五实施方式中,所述对所述第二分割数据集进行点云俯视投影,得到点云投影轮廓,通过所述点云投影轮廓对所述待检测隔离开关进行初步分合状态分析,生成初步分合状态分析结果,其中,所述初步分合状态分析结果包括分闸以及合闸,包括:
29、将所述第二分割数据集中所述第二导电拐臂点云数据以及所述第二隔离柱点云数据投影至预设的立体坐标系的第二平面中,得到第三点云投影图像;
30、对所述第三点云投影图像进行轮廓分析,得到点云投影轮廓;
31、对所述点云投影轮廓进行轮廓数量分析,得到数量分析结果;
32、通过所述数量分析结果对所述待检测隔离开关进行初步分合状态分析,生成初步分合状态分析结果,其中,所述初步分合状态分析结果包括分闸以及合闸。
33、结合第一方面,在本发明第一方面的第六实施方式中,所述对所述待比较数据集以及所述标准比对数据集进行数据比对,得到数据比对结果,并通过所述数据比对结果对所述待检测隔离开关进行分合状态分析,得到目标分合状态,包括:
34、对所述待比较数据集以及所述标准比对数据集进行数据拆分匹配,得到同一类型的待比较数据以及标准比对数据;
35、对所述待比较数据以及所述标准比对数据进行对比分析,得到数据比对结果,其中,所述数据比对结果包括数据百分比数据;
36、基于预设的阈值,通过所述数据百分比数据对所述待检测隔离开关进行分合状态分析,得到目标分合状态。
37、本发明第二方面提供了一种基于高精点云的隔离开关分合状态识别装置,所述基于高精点云的隔离开关分合状态识别装置包括:
38、采集模块,用于通过点云采集装置采集完全闭合状态下的隔离开关的第一点云数据集合,同时,通过所述点云采集装置采集待检测隔离开关的第二点云数据集合;
39、数据预处理模块,用于对所述第一点云数据集合进行数据旋转拟合处理,得到第一待分析数据,同时,对所述第二点云数据集合进行数据旋转拟合处理,得到第二待分析数据;
40、数据分割模块,用于对所述第一待分析数据进行点云数据分割,得到第一分割数据集,同时,对所述第二待分析数据进行点云数据分割,得到第二分割数据集;
41、拐臂夹角计算模块,用于通过所述第一分割数据集对所述完全闭合状态下的隔离开关进行导电拐臂夹角计算,得到第一导电拐臂夹角;
42、侧向偏移量计算模块,用于通过所述第一分割数据集对所述完全闭合状态下的隔离开关进行侧向夹角及侧向偏移量计算,得到第一侧向夹角以及第一侧向偏移量,并将所述第一导电拐臂夹角、所述第一侧向夹角以及所述第一侧向偏移量作为标准比对数据集;
43、轮廓分析模块,用于对所述第二分割数据集进行点云俯视投影,得到点云投影轮廓,通过所述点云投影轮廓对所述待检测隔离开关进行初步分合状态分析,生成初步分合状态分析结果,其中,所述初步分合状态分析结果包括分闸以及合闸;
44、综合生成模块,用于当所述初步分合状态分析结果为合闸时,通过所述第二待分析数据对所述待检测隔离开关进行拐臂夹角、侧向夹角及侧向偏移量分析,生成待比较数据集;
45、比对模块,用于对所述待比较数据集以及所述标准比对数据集进行数据比对,得到数据比对结果,并通过所述数据比对结果对所述待检测隔离开关进行分合状态分析,得到目标分合状态。
46、本发明第三方面提供了一种基于高精点云的隔离开关分合状态识别设备,包括:存储器和至少一个处理器,所述存储器中存储有指令;所述至少一个处理器调用所述存储器中的所述指令,以使得所述基于高精点云的隔离开关分合状态识别设备执行上述的基于高精点云的隔离开关分合状态识别方法。
47、本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述的基于高精点云的隔离开关分合状态识别方法。
48、本发明提供的技术方案中,通过点云采集装置采集完全闭合状态下的隔离开关的第一点云数据集合,同时,通过点云采集装置采集待检测隔离开关的第二点云数据集合;对第一点云数据集合进行数据旋转拟合处理,得到第一待分析数据,同时,对第二点云数据集合进行数据旋转拟合处理,得到第二待分析数据;对第一待分析数据进行点云数据分割,得到第一分割数据集,同时,对第二待分析数据进行点云数据分割,得到第二分割数据集;通过第一分割数据集对完全闭合状态下的隔离开关进行导电拐臂夹角计算,得到第一导电拐臂夹角;通过第一分割数据集对完全闭合状态下的隔离开关进行侧向夹角及侧向偏移量计算,得到第一侧向夹角以及第一侧向偏移量,并将第一导电拐臂夹角、第一侧向夹角以及第一侧向偏移量作为标准比对数据集;对第二分割数据集进行点云俯视投影,得到点云投影轮廓,通过点云投影轮廓对待检测隔离开关进行初步分合状态分析,生成初步分合状态分析结果,其中,初步分合状态分析结果包括分闸以及合闸;当初步分合状态分析结果为合闸时,通过第二待分析数据对待检测隔离开关进行导电拐臂夹角、侧向夹角及侧向偏移量分析,生成待比较数据集;对待比较数据集以及标准比对数据集进行数据比对,得到数据比对结果,并通过数据比对结果对待检测隔离开关进行分合状态分析,得到目标分合状态,在本发明中,利用点云数据来识别隔离开关的分合状态,不需要大量的点云数据进行模型训练,能够基于少量点云数据(2个及以上)即可进行隔离开关的识别,节省了大量的数据准备和模型训练时间;分别从导电拐臂的伸展方向和侧向偏移量两个角度综合判断隔离开关的分合状态,状态识别更全面、更准确;该方法还可以进一步推广到其它类型的隔离开关的分合状态识别领域,应用于变电站、换流站的日常巡检和一键顺控的实际应用。
- 还没有人留言评论。精彩留言会获得点赞!