一种应用于港口无人集卡的作业仿真测试方法及系统与流程
本发明涉及无人集卡,尤其是涉及一种应用于港口无人集卡的作业仿真测试方法及系统。
背景技术:
1、港口对现代信息化技术应用能力与智慧化程度,在一定意义上体现了一个国家的科学技术发展水平与现代物流的进步程度,也决定了港口的可持续发展能力和国际市场的竞争地位。
2、港口物流的高效、快速运作必须以畅通无阻的车辆行驶为基本保证对于提高码头装卸速度、加强车船周转、确保商品按时送达、缩短商品流通时间为前提。而将港口物流高效的问题,与信息化系统、无人集卡有效地结合起来。通过对码头集装箱业务的日常运作管理、运输调度、堆场管理、车辆管理、船舶停靠、起重装卸等业务、结合港口码头和无人集卡的作业特点,挖掘、分析与应用港口数据资产,通过算法优化,大幅提升港口智慧大脑的运筹优化和智能决策水平,真正做到智慧决策,减少对人力的依赖。
3、目前行业内港口信息化系统已成为研究热点,且有大量的成果发布,但是主要集中在集卡信息管理与分配作业任务应用方面,针于投入集卡运营前的作业测试方案,研究与发布的成果较少。
4、现有技术一中,《一种基于无人驾驶的港口调度系统及方法》(申请公开号:cn110598987a)该系统包括:1)控制中心模块;用于录入计划,管理协调车调模块、岸桥终端模块、龙吊终端模块、理化终端模块以执行所述计划任务,并与车调模块进行信息交互,实时获取车辆状态信息;2)车调模块:用于接受控制中心模块的控制管理,监控车辆状态,进行行驶线路规划,控制车辆运行;3)岸桥终端模块及龙吊终端模块:用于接收装船及卸船指令,按预定顺序进行装船及卸船作业,并反馈执行状态;4)理货终端模块:用于确认集装箱装车任务或卸车任务执行完毕,记录并校验装箱或卸箱信息。
5、该发明实施例中,通过1)控制中心分发计划任务,协调控制车辆、3)岸桥终端及龙吊终端进行装船或卸船作业,通过4)理货终端确认任务执行状态及装箱结果,与2)车调模块交互,对车辆在轨迹路线上运行进行监控跟踪,实时获取车辆运行状态,保障集卡车辆的合理调度, 降低集卡调度成本,同时根据3)岸桥终端、龙吊终端及4)理货终端的任务进度反馈信息,协调集卡、堆场资源,实现港口作业自动衔接,但是在实施前缺乏作业仿真过程,实施的调度方案在实际运营进行优化或更改车辆调度安排的成本较大。
6、现有技术二,《一种基于高精度地图的港口调度仿真系统》(申请公开号:cn114021909 a)该系统包括:1)场景构建模块,用于基于高精度地图获取路网信息、场景信息,并构建港口全要素仿真场景;坐标转换模块,用于将高精度地图中要素坐标转换为unity仿真场景三维坐标;数据更新模块,用于基于物联网大数据技术实时获取港口调度数据,并进行仿真数据更新;展示分析模块,用于监控车辆、塔吊实时状态,仿真展示港口调度作业,并生成分析报告,该发明是通用型的港口无人集卡仿真系统方案,但是缺乏仿真数据源、仿真操作过程、仿真结果分析及仿真后处理等内容,因此该发明中方案,实际工程适用面有限,难以推广。
技术实现思路
1、鉴于以上现有技术的不足,本发明提供了一种应用于港口无人集卡的作业仿真测试方法及系统,不仅与实际运营数据相结合,分析无人集卡在港口不同场景下的作业效率与行驶性能,为无人集卡调度算法开发,提供数据支持,并为实际应用提供对比分析结果,而且工程适用面广,方便推广。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
3、一种应用于港口无人集卡的作业仿真测试方法,所述方法包括:
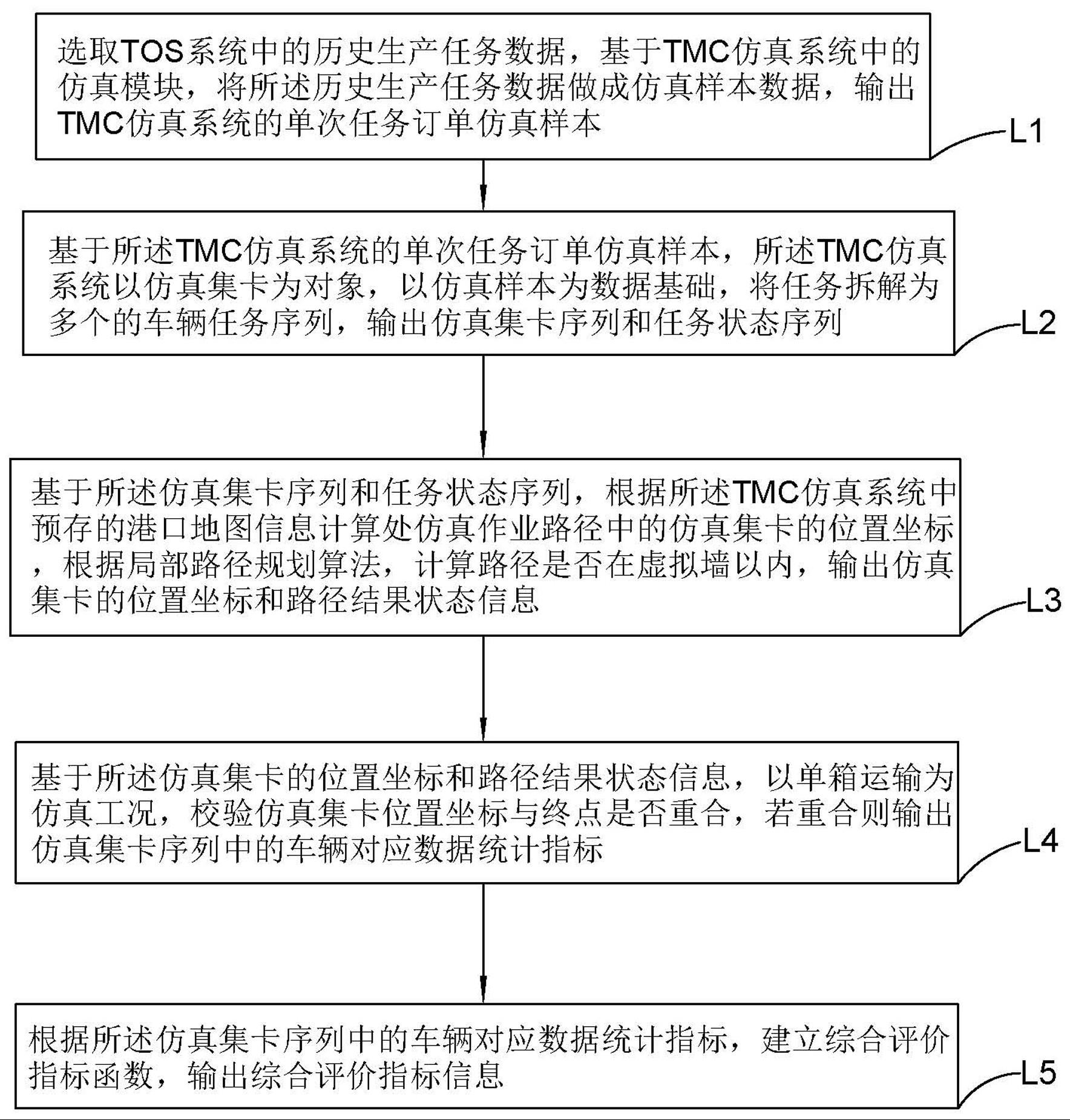
4、l1.选取tos系统中的历史生产任务数据,基于tmc仿真系统中的仿真模块,将所述历史生产任务数据做成仿真样本数据,输出tmc仿真系统的单次任务订单仿真样本;
5、l2.基于所述tmc仿真系统的单次任务订单仿真样本,以仿真集卡为对象,将单次任务订单拆解为多个的车辆任务序列,输出仿真集卡序列和与之对应的任务状态序列;
6、l3.基于所述仿真集卡序列和与之对应的任务状态序列,以所述tmc仿真系统中预存的港口地图信息,得出仿真作业路径中的所述仿真集卡序列的位置坐标,根据局部路径规划算法,计算仿真作业路径是否在虚拟墙以内,输出仿真集卡的位置坐标和路径结果状态信息;
7、l4.基于所述仿真集卡的位置坐标和路径结果状态信息,以单箱运输为仿真工况,校验所述仿真集卡位置坐标与所述路径结果状态信息是否匹配,若匹配则输出仿真集卡序列中的车辆对应数据统计指标;
8、l5.根据所述仿真序列中的车辆对应数据统计指标,建立综合评价指标函数,输出综合评价指标信息。
9、进一步的,在步骤l5中,所述综合评价指标函数为e,
10、,其中adij为第i辆集卡执行第j个任务的自动驾驶性能评价指标,为第i辆集卡执行第j个任务作业调度性能评价指标,m为集卡数量,n为任务数量。
11、进一步的,所述第i辆集卡执行第j个任务的自动驾驶性能评价指标adij为
12、,
13、其中mij为第i辆集卡执行第j个任务的自动驾驶稳定性参数,rij为第i辆集卡执行第j个任务的偏离车道压线次数,sij为第i辆集卡执行第j个任务的停车位置精度参数,m0为自动驾驶常量参数,ro为偏离车道常量参数,s0为停车位置精度常量参数。
14、进一步的,所述第i辆集卡执行第j个任务作业调度性能评价指标为
15、,
16、其中pij为第i辆集卡执行第j个任务的远控台人工介入参数,rij为第i辆集卡执行第j个任务的偏离车道压线次数,jij为第i辆集卡执行第j个任务的路口未能通行次数,tij为第i辆集卡执行第j个任务的执行时间,p0为人工介入常量参数,r0为偏离车道常量参数,j0为集卡未能通行常量参数,t0为执行时间常量参数。
17、进一步的,设置预设阈值,若所述综合评价指标信息大于或等于预设阈值,则代表该工况仿真结束,对应自动驾驶与作业调度策略,满足实施要求;若所述综合评价指标信息小于预设阈值,则表示该工况下的路径规划与调度算法,不满足实施要求,需要优化路径规划算法与调度策略。
18、进一步的,在步骤l4中,所述校验仿真集卡位置坐标与终点是否匹配的停车位置精度函数为:
19、,其中(xij,yij)为第i辆集卡执行第j个任务的任务结束点坐标,(xj0,yj0)为第j个任务的终点坐标。
20、进一步的,若sij等于零,则tmc仿真系统下发任务完成指令,仿真集卡确认该指令,关闭车辆任务信息,车辆状态复位;若sij不等于零,则tmc仿真系统对远控台下发指令,远控台模拟驾驶仿真集卡驶至终点,关闭车辆任务信息,车辆状态复位。
21、为了实现上述目的及其他相关目的,本发明还提供了一种应用于港口无人集卡的作业仿真测试系统,所述系统包括tos系统、tmc仿真系统、tcs系统、远控台和4g/5g移动通信网络;
22、所述tos系统为港口的码头任务计划与分配系统,用于管理和控制码头作业各个环节的计算机管理系统,下发码头的货船停泊、装卸任务与集装箱运输装卸任务,与所述tmc仿真系统通信连接,转发无人集卡的作业任务;
23、所述tmc仿真系统为港口无人集卡信息化系统,集指挥、调度、远程控制、模拟仿真、运维监控、故障处理、大数据分析、网络安全策略设置功能为一体的系统,进行无人集卡的作业仿真测试;
24、所述tcs系统接收港口路侧传感器信息,以及其它交通参与者信息,通过边缘计算部署,实时计算局部的实时交通信息,转发至所述tmc仿真系统作为车辆作业仿真的局部交通信息依据;
25、所述远控台为所述tmc仿真系统的终端,对无人自动驾驶设备进行实时监控及远程操作,为所述tmc仿真系统提供人工接管车辆的数据;
26、所述4g/5g移动通信网络,与所述tos系统、所述tmc仿真系统、所述tcs系统和所述远控台连接,为各系统各组成部分提供无线通信网络。
27、进一步的,所述tcs系统与所述tmc仿真系统5g通信连接。
28、进一步的,所述远控台还包括预警提示模块,用于提示人工接管车辆发出预警信号。
29、本发明具有以下积极效果:
30、1.本发明以云后台为仿真系统的基础,与实际运营数据相结合,分析无人集卡在港口不同场景下的作业效率与行驶性能,为无人集卡调度算法开发,提供数据支持,并为实际应用提供对比分析结果。
31、2.本发明通过综合评价指标函数对港口无人集卡的运输过程进行评价和分析,不仅提高了无人集卡运输货物的精确度,而且降低了无人集卡的出错率,进一步提高了无人集卡的运输效率和安全性。
- 还没有人留言评论。精彩留言会获得点赞!