基于激光雷达扫描垃圾储坑建模成像辅助垃圾处理方法与流程
本发明属于垃圾处理,尤其涉及基于激光雷达扫描垃圾储坑建模成像辅助垃圾处理方法。
背景技术:
1、为了实现更好的废物利用,出现了垃圾利用技术,垃圾发电便是其中的一种关键技术。垃圾发电企业的垃圾储坑是用来存放垃圾焚烧炉所需各种生活垃圾的场地,它主要有贮存和发酵两类功能。
2、为了充分发挥垃圾储坑的作用,需要垃圾储坑内的垃圾能够位于正确的位置(通常为按倒入日期依次堆成垃圾堆,并间隔堆放),但除了从倒料口倒入以及储坑内部转料时需要处理外,垃圾在储坑存储发酵的过程中时常会由于在发酵过程中出现塌料等情况,同样需要进行处理。现有技术中,当储坑内有垃圾需要处理时,通常是由人工控制电动吊爪进行相应的处理(如抓沟、塌料填平等)。
3、但是,储坑存储垃圾时出现垃圾需要处理情况的随机性很强,没有规律性,人工处理难以第一时间发现并进行处理,处理效果也依赖于处理人员的经验及精神状态(精神饱满或精力涣散)等个人因素。因此,人工控制电动吊爪进行处理的方式不仅耗费人力,处理的及时性和效果也难以保证。
4、因此,怎样才能及时、准确且减少人力耗费的完成储坑中垃圾的处理,成为目前亟待解决的问题。
技术实现思路
1、针对上述现有技术的不足,本发明提供了一种基于激光雷达扫描垃圾储坑建模成像辅助垃圾处理方法,可以及时、准确且减少人力耗费的完成储坑中垃圾的处理。
2、为了解决上述技术问题,本发明采用了如下的技术方案:
3、基于激光雷达扫描垃圾储坑建模成像辅助垃圾处理方法,包括以下步骤:
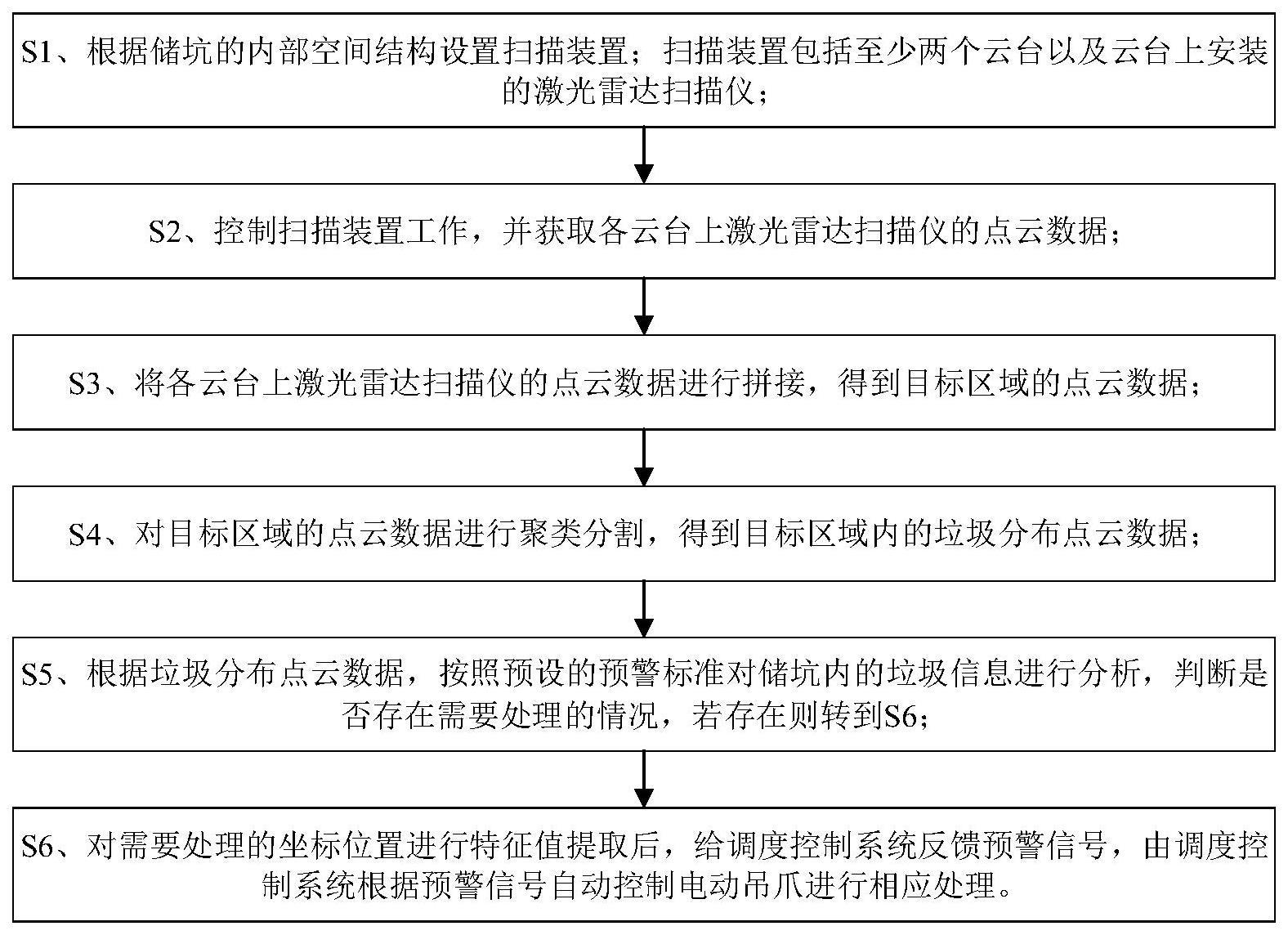
4、s1、根据储坑的内部空间结构设置扫描装置;扫描装置包括至少两个云台以及云台上安装的激光雷达扫描仪;扫描装置工作时,激光雷达扫描仪的扫描范围将目标区域全覆盖,所述目标区域包括储坑内的整个垃圾池区域;
5、s2、控制扫描装置工作,并获取各云台上激光雷达扫描仪的点云数据;
6、s3、将各云台上激光雷达扫描仪的点云数据进行拼接,得到目标区域的点云数据;
7、s4、对目标区域的点云数据进行聚类分割,得到目标区域内的垃圾分布点云数据;
8、s5、根据垃圾分布点云数据,按照预设的预警标准对储坑内的垃圾信息进行分析,判断是否存在需要处理的情况,若存在则转到s6;
9、s6、对需要处理的坐标位置进行特征值提取后,给调度控制系统反馈预警信号,由调度控制系统根据预警信号自动控制电动吊爪进行相应处理。
10、优选地,s3中,进行所述拼接前,还对各云台上激光雷达扫描仪的点云数据进行去噪预处理。
11、优选地,s3中,进行拼接时,采用ndt扫描匹配算法,通过标定激光雷达外参,将各激光雷达扫描仪的点云数据整合到统一坐标系下展示。
12、优选地,s5中,还通过垃圾分布点云数据计算垃圾的堆料体积。
13、优选地,s5中,垃圾的堆料体积的计算过程包括,建立垃圾的三维模型后,分别计算三维模型中各点云格区的堆料体积;其中,所述点云格区是指三维模型中以点云数据中以预设数量的点云坐标作为划分标准所预划定的网格区域;
14、其中,第l个点云格区的堆料体积的计算公式为:
15、
16、ml,rel(x,y)=ml,abs(x,y)-ml,0(x,y);
17、其中,vl表示第l个点云格区的堆料体积,ml,rel(x,y)表示第l个点云格区中对应于点云坐标(x,y)的垃圾堆料高度值,ml,abs(x,y)表示第l个点云格区中对应于点云坐标(x,y)的点云数据绝对高度值,ml,0(x,y)表示第l个点云格区中对应于点云坐标(x,y)的垃圾池地面在点云数据坐标系下的高度值。
18、优选地,s6中,所述警示信号的内容包括处理类型以及处理位置。
19、优选地,s6中,所述处理类型包括抓沟和/或塌料风险处理。
20、优选地,本方法中,目标区域的垃圾分布点云数据的更新频率为10分钟1次。
21、优选地,s1中,还在目标区域设置多个标定物,并存储各标定物的位置信息;且每个激光雷达扫描仪的扫描范围至少包含两个标定物,每个标定物至少属于两个激光雷达扫描仪的扫描范围;
22、s4中,得到目标区域内的垃圾分布点云数据后,还分析各标定物的位置与存储的位置信息是否匹配;若匹配则转到s5;若不匹配,则判断当前为第几次连续重复扫描,若小于n次则转到s2重新扫描,若达到n次则转到s7;
23、s7、依次分析各位置不匹配的标定物的点云数据的来源,将对应的激光雷达扫描仪标记为疑似异常;分析疑似异常的激光雷达扫描仪的扫描范围内是否存在位置匹配的标定物,若存在,则删除该激光雷达扫描仪的疑似异常标记;若不存在,则将该激光雷达扫描仪标记为异常装置;
24、并在所有的激光雷达扫描仪均完成标记后,分析是否每个位置不匹配的标定物,均有对应的标记为异常装置的激光雷达扫描仪,则转到s8;若不是,则将没有对应标记为异常装置的标定物标记为异常标定物,并转到s8;
25、s8、发出异常信号,所述异常信号的内容包括异常装置和/或异常标定物。
26、本发明与现有技术相比,具有如下有益效果:
27、1.使用本方法,(通过后台系统自动控制)扫描装置工作时,可以通过各云台上的激光雷达扫描仪对目标区域进行全覆盖的扫描,之后,通过将扫描得到的点云数据进行拼接及聚类分割,便可以得到目标区域的垃圾分布的点云数据。换个说法,可以得到目标区域的垃圾的分布形态。之后,按照预设的预警标准对储坑内的垃圾信息进行分析,判断是否存在需要处理的情况(如抓沟等)。如果存在,则后台系统给调度控制系统反馈预警信号,由调度控制系统根据预警信号自动控制电动吊爪进行相应处理。通过这样的方式,可以定时对目标区域的垃圾进行监测,并在监测到需要处理的情况时自动对其进行处理。
28、综上,本方法可以及时、准确且减少人力耗费的完成储坑中垃圾的处理。
29、2.本方法使用多台扫描仪的扫描数据进行拼接,极大程度上降低了视角盲区的存在,提高了三维建模的真实性和准确性。
30、3.基于激光扫描垃圾池建模成像方法可以准确反馈抓取位置、堆放位置、是否需要抓沟、是否需要注意塌料,有效避免现场员工视觉疲劳后存在的误判情况,在提高抓垃圾效率的同时也提高了抓斗安全运行的保障。
31、4.在进行异常监测的同时,本方法还会同步对目标区域的垃圾的堆料体积进行测算,从而保证目标区域内垃圾信息的准确性和完整度。
32、5.本方法中,当出现连续n次均存在标定物的位置匹配不上的情况(即,确定扫描装置和/或标定物存在异常)时。首先,会依次分析各位置不匹配的标定物的点云数据的来源,将对应的激光雷达扫描仪标记为疑似异常;之后,分析疑似异常的激光雷达扫描仪的扫描范围内是否存在位置匹配的标定物,若存在,则说明该激光雷达扫描仪不存在问题,导致位置不匹配的局部优化的直接原因,时其他的激光雷达扫描仪或者标定物本身,因此,删除该激光雷达扫描仪的疑似异常标记。若不存在位置匹配的标定物,则说明该激光雷达扫描仪的扫描数据存在问题,因此,将该激光雷达扫描仪标记为异常装置。同时,在所有的激光雷达扫描仪均完成标记后,还会分析是否每个位置不匹配的标定物,均有对应的标记为异常装置的激光雷达扫描仪,则说明各标定物的异常均是由于激光雷达扫描仪产生并已经找到了对应的装置。如果不是,则说明某个(或某些)位置不匹配的标定物,其对应的激光雷达扫描仪均正常,则可以确定时标定物本身出现了异常,因此,将该标定物标记为异常标记物。最后,将异常装置和/或异常标定物通过异常信号的方式发出,让工作人员进行相应的处理,保证本方法的准确性和有效性。
- 还没有人留言评论。精彩留言会获得点赞!