一种行人与非机动车微观行为建模方法
本公开涉及自动驾驶仿真,具体涉及一种行人与非机动车微观行为建模方法。
背景技术:
1、自动驾驶技术是未来交通的发展趋势及核心,自动驾驶仿真技术可以为自动驾驶汽车提供高保真、高标准的虚拟仿真环境,是推进自动驾驶技术研发和测试中不可或缺的一部分。然而,现有的自动驾驶仿真平台如apollo、carla、51sim-one等,往往更加侧重车辆动力学仿真、车辆传感器仿真以及仿真场景中各类物体的建模仿真,对于交通参与者行为仿真关注较少,其背景交通流大多通过导入交通流仿真平台如vissim、sumo中的数据。一方面这些交通仿真平台往往服务于交通工程领域,并不适用于自动驾驶仿真测试,另一方面都是基于规则的逻辑框架生成的交通流,将交通参与者之间的交互过程简单的划分为跟驰、换道、避让等基本交互行为,对于非车辆的交通参与者与车辆的冲突过程仅通过赋予不同的优先权来规避,交通参与者运行状态理想,优先权明确,无法生成能够与自动驾驶汽车产生较为复杂交互的背景交通参与者,对自动驾驶汽车的决策控制算法训练和测试意义有限。
2、同时针对目前大量的道路交通环境中涵盖着机动车、行人、非机动车等交通参与者的现况,其中行人与骑行者高效灵活的行为运动方式使得城市的交通场景更为复杂且随机、更为难以建模,车辆与行人和非机动车的交互也更加频繁。自上世纪八十年代以来,对行人运动进行建模分析引起许多学者的关注,并相继提出了多种描述行人运动的模型。现有的用于描述行人运动的微观模型主要有社会力模型、元胞自动机模型、磁力模型等,其中社会力模型能在一定程度上描述行人与交通环境之间的作用机理,因此应用广泛。但现有的基于社会力的行人模型仍然存在一定的不足,首先是未考虑车辆对于行人运动行为的影响,或者仅仅将车辆视为障碍物进行考虑,没有考虑行人与机动车驾驶员之间的博弈行为。同时社会力模型没有考虑行人在复杂场景的决策行为,仅凭由力学原理构建的模型难以实现对行人与交通环境微观交互机理的精确描述。而对于非机动车微观模型,目前研究方法与研究体系尚不成熟,一般借鉴机动车或者行人模型中的方法来描述其行为。因此,亟需为自动驾驶仿真软件构建一种能够准确描述城市交通场景下行人和非机动车微观交通行为的仿真模型,为自动驾驶汽车提供真实丰富的道路交通环境,以满足自动驾驶汽车的决策控制算法的训练和测试环境的真实性需求,对加速自动驾驶汽车的落地等方面均具有重要意义。
技术实现思路
1、针对上述问题,本公开的目的是提供一种行人和非机动车微观行为建模方法,通过设计通用框架,贴近人类认知过程,来模拟城市行人和非机动车的交通行为,为自动驾驶汽车提供真实丰富的道路交通环境,以满足其训练和仿真测试的真实性需求。
2、为实现上述目的,本公开采取以下技术方案:
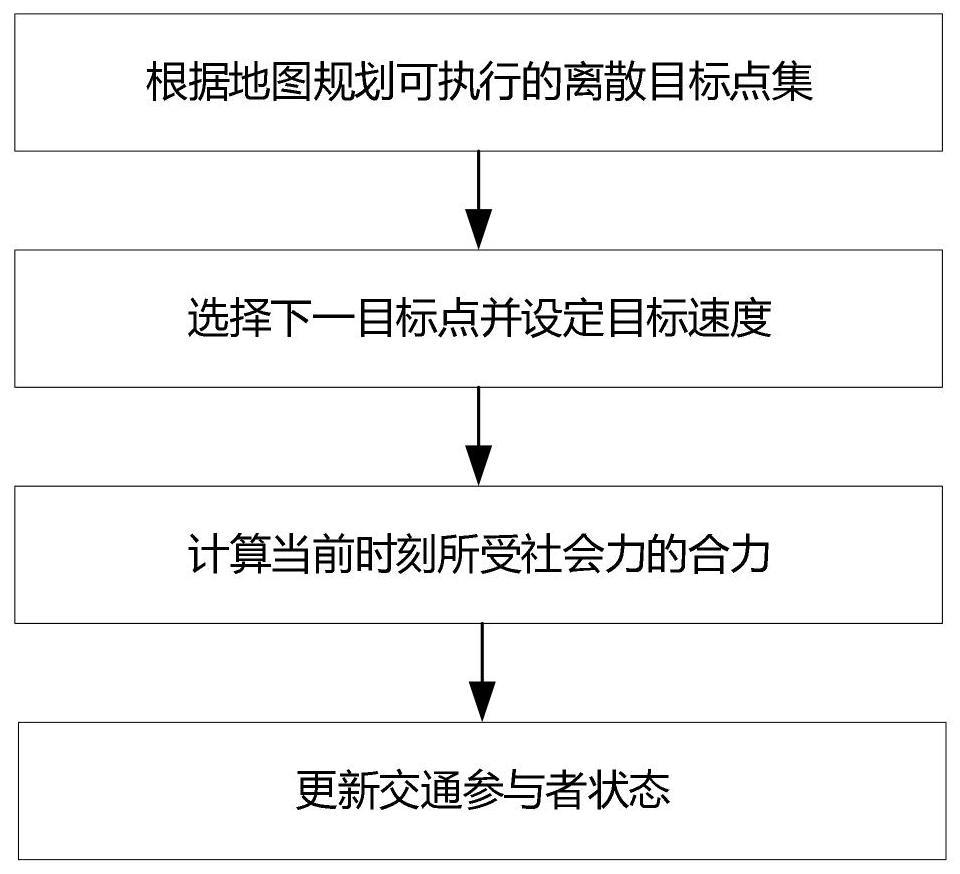
3、本公开第一方面提供的一种行人与非机动车微观行为建模方法,包括:
4、根据道路拓扑结构确定被控交通参与者的可执行的离散目标点集合,根据所述可执行的离散目标点集合中各离散点的连通关系构建有向图并确定有向图的邻接矩阵,所述被控交通参与者包括行人与非机动车;
5、按照以下步骤从所述可执行的离散目标点集合中根据被控交通参与者到达的当前目标点确定下一目标点并设定目标速度:利用根据所述有向图的邻接矩阵得到的与当前目标点具有连通关系的目标点构建候选目标点集合,将所述候选目标点集合中处于交叉路口内且交通信号灯为红灯的目标点从候选目标点集合中删除,得到更新后的候选目标点集合,若所述更新后的候选目标点集合中无元素,则将当前目标点选择为下一目标点并设定目标速度,若所述更新后的候选目标点集合中存在元素,则将所述更新后的候选目标点集合中安全风险最小的目标点选择为下一目标点并设定目标速度;
6、根据所述下一目标点、所述目标速度和当前交通参与者的状态计算被控交通参与者所受的社会力合力,所述被控交通参与者所受的社会力合力包括行人和非机动车对被控交通参与者的社会力、车辆对被控交通参与者的社会力以及被控交通参与者在交通场景中受到的自驱力;所述车辆对被控交通参与者的社会力是通过结合车辆当前位置至未来时刻位置所涵盖的区域投影至被控交通参与者目标点坐标系下形成抽象的车辆形状,同时将横纵向距离较近的车辆合并抽象为一辆车,分开计算车辆对被控交通参与者的横向社会力和纵向社会力,并根据被控交通参与者相对车辆的位置约束横向社会力和纵向社会力的大小所得到的参数;
7、根据所述被控交通参与者所受的社会力合力更新下一时刻的被控交通参与者的状态。
8、可选地,所述目标点坐标系的定义为:若被控交通参与者从初始点p0开始运动,当前目标点为p1,则目标点坐标系的原点为p0,y轴及其正方向为从p0到p1的向量,x轴由y轴顺时针旋转π/2得到;当被控交通参与者选取下一目标点p2时,同步更新目标点坐标系,其原点更新为被控交通参与者当前目标点p1,y轴及其正方向为从p1到p2的向量,x轴由y轴顺时针旋转π/2得到。
9、可选地,设由在被控交通参与者一定感知范围内的行人和非机动车在所述目标点坐标系下的状态构成的集合为状态集合ssur,所述行人和非机动车对被控交通参与者的社会力fsur为在所述目标点坐标系下的值,按照下式计算得到:
10、
11、
12、
13、其中,n是状态集合ssur中行人和非机动车的数量,是状态集合ssur中行人或非机动车的编号,asur是第一强度系数,bsur是第一距离系数,是状态集合ssur中行人或非机动车对被控交通参与者的各向异性系数,是状态集合ssur中行人或非机动车的椭圆力场短半轴长度,β是各向异性参数,是状态集合ssur中行人或非机动车与被控交通参与者位置的连线方向与该被控交通参与者速度方向的夹角,是状态集合ssur中行人或非机动车在当前时刻的速度,是状态集合ssur中行人或非机动车在当前时刻的位置,p是被控交通参与者在当前时刻的位置,δt是预测时间,以和为焦点,做经过p的椭圆,为该椭圆上位于p处方向朝外的法向向量。
14、可选地,设由在被控交通参与者一定感知范围内的车辆在所述目标点坐标系下的状态构成的集合为状态集合sveh,所述车辆对被控交通参与者的社会力fveh为在所述目标点坐标系下的值,按照以下步骤得到:
15、根据状态集合sveh中各车辆的当前状态计算预测时间tp后状态集合sveh中各车辆外形的角点坐标,并更新各车辆的状态,得到更新后的状态集合s′veh;
16、遍历更新后的状态集合s′veh中的各车辆,进行以下车辆形状合并判断:若相邻车辆之间的横向最短距离和纵向最短距离均小于设定的距离阈值,则认为相邻车辆满足形状合并条件,将满足形状合并条件的相邻车辆合并为一个车辆群,并计算车辆群的状态,后续将单个车辆群视为一个车辆参与计算,否则,认为车辆不满足形状合并条件,不对其进行合并处理;从而得到经过车辆形状合并判断的状态集合;
17、按照下式计算状态集合中所有车辆对被控交通参与者的横向力
18、
19、
20、
21、
22、
23、其中,是状态集合中车辆对被控交通参与者的横向力;m为状态集合中所含车辆的数量;aveh是第二强度系数;bveh是第二距离系数;是被控交通参与者所能承受的车辆对其社会力的上限值;是被控交通参与者与状态集合中车辆的横向距离;是状态集合中车辆对被控交通参与者的各向异性系数;是状态集合中车辆对被控交通参与者的横向方向系数,用于计算的方向,当被控交通参与者在状态集合中车辆左侧时取-1,右侧时取1;是状态集合中车辆对被控交通参与者的衰减系数,用于约束的大小,当被控交通参与者相对于状态集合中车辆的横向位置的绝对值小于时,取1,当大于且小于时,按比例衰减,和分别为状态集合中车辆的长和宽,当大于一定距离时,认为被控交通参与者不受状态集合中车辆带来的横向力的影响,取0;是状态集合中车辆的形状轮廓的横向外延距离,用于计算被控交通参与者与车辆边界的纵向距离,是状态集合中车辆的形状轮廓的纵向外延距离,用于计算被控交通参与者与车辆的横向距离;是被控交通参与者相对于状态集合中车辆的纵向位置;
24、按照下式计算状态集合中所有车辆对被控交通参与者的纵向力
25、
26、
27、
28、
29、其中,是状态集合中车辆对被控交通参与者的纵向力;是状态集合中车辆的纵向方向系数,用于计算的方向,当被控交通参与者在状态集合中车辆的下方时取-1,上方时取1;是被控交通参与者与状态集合中车辆的纵向距离;
30、根据状态集合中所有车辆对被控交通参与者的横向力和所有车辆对被控交通参与者的纵向力得到车辆对被控交通参与者的社会力fveh。
31、可选地,设所述更新后的状态集合s′veh中车辆的状态包括车辆的横坐标纵坐标速率、朝向角长和宽其中速率保持不变,其余参数的计算公式如下:
32、
33、
34、
35、
36、
37、其中,分别为更新后车辆的形状在当前时刻和预测时间tp四个角点的横坐标,分别为更新后车辆的形状在当前时刻和预测时间tp四个角点的纵坐标。
38、可选地,设需要进行合并处理构成的单个车辆群的状态为包括车辆群的横坐标x″、纵坐标y″、朝向角长l″和宽w″,按照下式计算得到:
39、
40、
41、
42、
43、
44、
45、其中,分别为车辆群中车辆的横坐标、纵坐标、朝向角、长和宽。
46、可选地,所述被控交通参与者在交通场景中受到的自驱力fself为在所述目标点坐标系下的值,按照以下步骤得到:
47、按照下式计算原始自驱力
48、
49、其中,是当前时刻被控交通参与者的目标点pc中的目标速度,是被控交通参与者的当前位置指向目标点pc的单位向量,v是被控交通参与者在当前时刻的速度,τ是调整时间,是被控交通参与者在交通场景中受到的原始横向自驱力,是被控交通参与者在交通场景中受到的原始纵向自驱力;
50、按照下式对原始自驱力进行修正得到被控交通参与者在交通场景中受到的自驱力fself:
51、
52、
53、
54、其中,sign(·)为符号函数,当数值大于0时取1,等于0时取0,小于0时取-1;和分别为被控交通参与者在交通场景中受到的横向自驱力和纵向自驱力;为车辆纵向力的阈值,由与车辆边界的安全距离dsafe计算得到:aveh是第二强度系数,bveh是第二距离系数。
55、可选地,根据所述被控交通参与者所受的社会力合力更新下一时刻的被控交通参与者的状态,包括:
56、按照下式计算当前时刻被控交通参与者的加速度at:
57、
58、其中,ft是被控交通参与者t时刻受到的社会力合力,m是被控交通参与者的质量;
59、按照下式计算被控交通参与者下一时刻的状态:
60、vt+1=vt+at·t
61、
62、其中,pt是被控交通参与者当前时刻的位置,vt是被控交通参与者当前时刻的速度;
63、按照如下公式对被控交通参与者在下一时刻的状态进行修正:
64、
65、
66、
67、
68、其中,是被控交通参与者的横向最大偏移距离,和分别是修正后被控交通参与者在下一时刻的横向位置和纵向位置,px,t和py,t分别是被控交通参与者在当前时刻的横向位置和纵向位置;
69、将修正后的被控交通参与者在下一时刻的状态转换至大地坐标系下的值。
70、本公开第二方面实施例提供的一种行人与非机动车微观行为建模装置,包括:
71、第一模块,被配置为根据道路拓扑结构确定被控交通参与者的可执行的离散目标点集合,根据所述可执行的离散目标点集合中各离散点的连通关系构建有向图并确定有向图的邻接矩阵,所述被控交通参与者包括行人与非机动车;
72、第二模块,被配置为按照以下步骤从所述可执行的离散目标点集合中根据被控交通参与者到达的当前目标点确定下一目标点并设定目标速度:利用根据所述有向图的邻接矩阵得到的与当前目标点具有连通关系的目标点构建候选目标点集合,将所述候选目标点集合中处于交叉路口内且交通信号灯为红灯的目标点从候选目标点集合中删除,得到更新后的候选目标点集合,若所述更新后的候选目标点集合中无元素,则将当前目标点选择为下一目标点并设定目标速度,若所述更新后的候选目标点集合中存在元素,则将所述更新后的候选目标点集合中安全风险最小的目标点选择为下一目标点并设定目标速度;
73、第三模块,被配置为根据所述下一目标点、所述目标速度和当前交通参与者的状态计算被控交通参与者所受的社会力合力,所述被控交通参与者所受的社会力合力包括行人和非机动车对被控交通参与者的社会力、车辆对被控交通参与者的社会力以及被控交通参与者在交通场景中受到的自驱力;所述车辆对被控交通参与者的社会力是通过结合车辆当前位置至未来时刻位置所涵盖的区域投影至被控交通参与者目标点坐标系下形成抽象的车辆形状,同时将横纵向距离较近的车辆合并抽象为一辆车,分开计算车辆对被控交通参与者的横向社会力和纵向社会力,并根据被控交通参与者相对车辆的位置约束横向社会力和纵向社会力的大小所得到的参数;
74、第四模块,被配置为根据所述被控交通参与者所受的社会力合力更新下一时刻的被控交通参与者的状态。
75、本公开第四方面实施例提供的一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令用于使所述计算机执行根据本公开第一方面任一实施例所述的行人与非机动车微观行为建模方法。
76、本公开的特点及有益效果:
77、本公开提出的一种行人与非机动车微观行为建模方法,其特点在于基于人类的认知过程,与传统的交通流领域中的模型相比,整体逻辑架构清晰明了,易于拓展,具体表现在:其一为构建的交通参与者可执行目标点集时仅考虑地图拓扑信息,简单高效。其二为建立了被控交通参与者选择下一目标点和设定目标速度模块,相较于现有的模型仅通过简单规则描述交通参与者决策的不足,结合被控交通参与者当前交通场景下的安全风险对于其决策的影响,更为接近实际情况。其三为对现有社会力模型进行了修正,通过坐标转换,结合车辆未来轨迹将其外轮廓投影至行人目标点坐标系下形成新的外轮廓,同时合并横纵向距离较近的车辆为同一个车辆群,分开计算车辆对被控交通参与者的横向社会力和纵向社会力,并根据被控交通参与者相对车辆的位置约束横纵向社会力的大小,为防止更新状态时被控交通参与者横向偏移过大以及纵向位置减小等问题,修正了被控交通参与者状态更新方式。
78、综上所述,本公开提出的建模方法仅用少数参数就能描述被控交通参与者的复杂动态的运动,更加符合真实交通场景。
- 还没有人留言评论。精彩留言会获得点赞!