基于无人机的农业种植管理系统及其方法与流程
本技术涉及智能识别领域,且更为具体地,涉及一种基于无人机的农业种植管理系统及其方法。
背景技术:
1、农业种植管理系统是指利用计算机、感知技术、云计算和自动控制技术对农田进行实时监测、预警和管理的一种系统。它的主要功能包括农田参数采集、作物识别、智能控制等。农业种植管理系统节省劳动力、提高生产力、保护环境等特点,在现代农业生产中具有重要的意义。
2、现有的农业种植管理系统通常使用图像识别技术来监测病虫害,但是对数据的分析主要依赖人工分析数据,这不仅效率低下,而且容易出错。
3、因此,期待一种优化的基于无人机的农业种植管理方案。
技术实现思路
1、为了解决上述技术问题,提出了本技术。本技术的实施例提供了一种基于无人机的农业种植管理系统及其方法,其利用待检测叶片目标区域图像和数据库中参考叶片图像在高维特征空间中的全局性差异分布信息来判断病虫害的类型并根据判断的病虫害类型来采取对应的防治措施。这样,有效地提高了叶片病虫害识别的效率和准确率,提高了农业生产的效率。
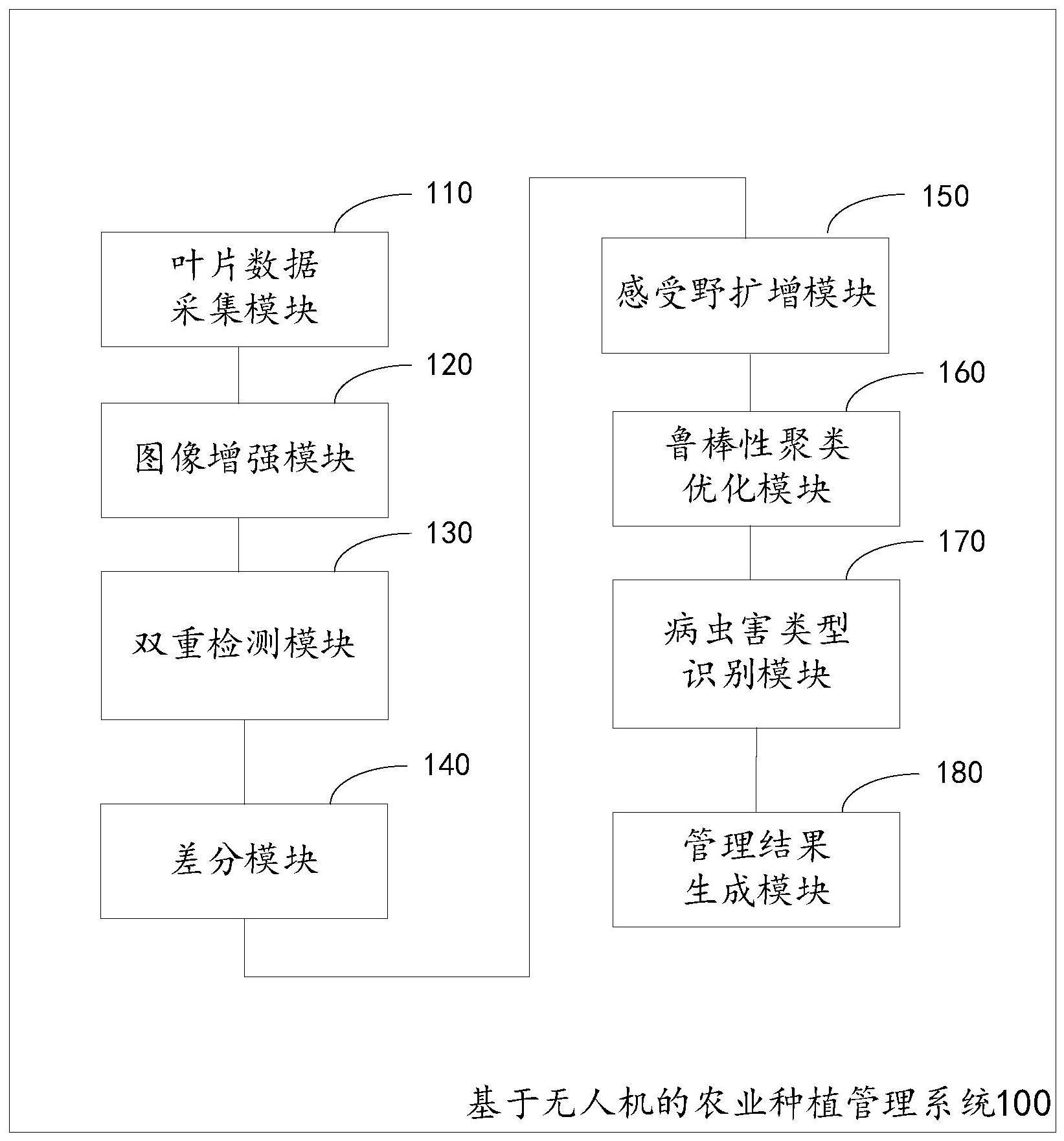
2、根据本技术的一个方面,提供了一种基于无人机的农业种植管理系统,其包括:
3、叶片数据采集模块,用于获取待检测叶片目标区域图像和数据库中的参考叶片图像;
4、图像增强模块,用于将所述待检测叶片目标区域图像通过基于自编解码器的高清图像生成器以得到增强叶片目标区域图像;
5、双重检测模块,用于将所述增强叶片目标区域图像和所述参考叶片图像通过包含第一卷积神经网络和第二卷积神经网络的双重检测模型以得到检测特征图和参考特征图,所述第一卷积神经网络和所述第二卷积神经网络具有相同的网络结构;
6、差分模块,用于计算所述检测特征图和所述参考特征图之间的差分特征图;
7、感受野扩增模块,用于将所述差分特征图通过非局部神经网络模型以得到增强差分特征图;
8、鲁棒性聚类优化模块,用于对所述增强差分特征图进行鲁棒性聚类优化以得到优化增强差分特征图;
9、病虫害类型识别模块,用于将所述优化增强差分特征图通过分类器以得到分类结果,所述分类结果用于表示病虫害类型的标签;以及
10、管理结果生成模块,用于基于所述分类结果,采取对应的病虫害防治措施。
11、在上述基于无人机的农业种植管理系统中,所述图像增强模块,包括:信号编码单元,用于使用所述自编解码器的编码器从所述待检测叶片目标区域图像中提取叶片目标区域特征图,其中,所述自编解码器的编码器为卷积层;以及,信号解码单元,用于使用所述自编解码器的解码器对所述叶片目标区域特征图进行解码以得到所述增强叶片目标区域图像,其中,所述自编解码器的解码器为反卷积层。
12、在上述基于无人机的农业种植管理系统中,所述第一卷积神经网络和所述第二卷积神经网络为使用空间注意力机制的卷积神经网络模型。
13、在上述基于无人机的农业种植管理系统中,所述双重检测模块,用于:使用所述第一卷积神经网络的各层在层的正向传递中分别对输入数据进行:对输入数据进行卷积处理以得到卷积特征图;对所述卷积特征图进行基于局部特征矩阵的池化处理以得到池化特征图;以及,对所述池化特征图进行非线性激活以得到激活特征图;其中,所述第一卷积神经网络的最后一层的输出为所述检测特征图,所述第一卷积神经网络的第一层的输入为所述增强叶片目标区域图像。
14、在上述基于无人机的农业种植管理系统中,所述双重检测模块,还用于:使用所述第二卷积神经网络的各层在层的正向传递中分别对输入数据进行:对输入数据进行卷积处理以得到卷积特征图;对所述卷积特征图进行基于局部特征矩阵的池化处理以得到池化特征图;以及,对所述池化特征图进行非线性激活以得到激活特征图;其中,所述第二卷积神经网络的最后一层的输出为所述参考特征图,所述第二卷积神经网络的第一层的输入为所述参考叶片图像。
15、在上述基于无人机的农业种植管理系统中,所述差分模块,用于:以如下差分公式计算所述检测特征图和所述参考特征图之间的所述差分特征图;其中,所述差分公式为:
16、
17、其中,f1表示所述检测特征图,f2表示所述参考特征图,fc表示所述差分特征图,表示按位置差分。
18、在上述基于无人机的农业种植管理系统中,所述感受野扩增模块,包括:点卷积单元,用于将所述差分特征图分别输入所述非局部神经网络模型的第一点卷积层、第二点卷积层和第三点卷积层以得到第一特征图、第二特征图和第三特征图;第一融合单元,用于计算所述第一特征图和所述第二特征图的按位置加权和以得到中间融合特征图;归一化单元,用于将所述中间融合特征图输入softmax函数以对所述中间融合特征图中各个位置的特征值进行归一化以得到归一化中间融合特征图;第二融合单元,用于计算所述归一化中间融合特征图和所述第三特征图的按位置加权和以得到再融合特征图;全局感知单元,用于将所述再融合特征图通过嵌入高斯相似性函数以计算所述再融合特征图中各个位置的特征值间的相似性以得到全局感知特征图;通道数调整单元,用于将所述全局感知特征图通过所述非局部神经网络模型的第四点卷积层以得到通道调整全局感知特征图;以及,第三融合单元,用于计算所述通道调整全局感知特征图和所述差分特征图的按位置加权和以得到所述增强差分特征图。
19、在上述基于无人机的农业种植管理系统中,所述鲁棒性聚类优化模块,包括:特征展平单元,用于将所述增强差分特征图的沿通道维度的各个局部特征矩阵进行特征展平以得到多个分类局部特征向量;js散度值生成单元,用于分别计算所述增强差分特征图的聚类中心与所述多个分类局部特征向量中的各个分类局部特征向量之间的js散度值以得到多个js散度值;高斯归一化处理单元,用于对所述多个js散度值进行高斯归一化以得到多个归一化js散度值;加权单元,用于以所述各个归一化js散度值作为权重,分别对所述各个分类局部特征向量进行加权以得到多个优化分类局部特征向量;以及,维度重构单元,用于将所述多个优化分类局部特征向量进行维度重构以得到所述优化增强差分特征图。
20、在上述基于无人机的农业种植管理系统中,所述js散度值生成单元,进一步用于:以如下散度值计算公式来分别计算所述增强差分特征图的聚类中心与所述多个分类局部特征向量中的各个分类局部特征向量之间的js散度值以得到所述多个js散度值;其中,所述散度值计算公式为:
21、
22、其中,jsi表示所述多个js散度值中的第i个js散度值,vi表示所述多个分类局部特征向量中的第i个分类局部特征向量,v1,v2,....,vn表示所述多个分类局部特征向量,表示特征训练的按位置加法,n表示所述多个分类局部特征向量的个数,表示所述增强差分特征图的聚类中心,s表示所述增强差分特征图的聚类中心和所述多个分类局部特征向量中的第i个分类局部特征向量的平均分布,kl表示相对熵。
23、根据本技术的另一方面,提供了一种基于无人机的农业种植管理方法,其包括:
24、获取待检测叶片目标区域图像和数据库中的参考叶片图像;
25、将所述待检测叶片目标区域图像通过基于自编解码器的高清图像生成器以得到增强叶片目标区域图像;
26、将所述增强叶片目标区域图像和所述参考叶片图像通过包含第一卷积神经网络和第二卷积神经网络的双重检测模型以得到检测特征图和参考特征图,所述第一卷积神经网络和所述第二卷积神经网络具有相同的网络结构;
27、计算所述检测特征图和所述参考特征图之间的差分特征图;
28、将所述差分特征图通过非局部神经网络模型以得到增强差分特征图;
29、对所述增强差分特征图进行鲁棒性聚类优化以得到优化增强差分特征图;
30、将所述优化增强差分特征图通过分类器以得到分类结果,所述分类结果用于表示病虫害类型的标签;以及
31、基于所述分类结果,采取对应的病虫害防治措施。
32、与现有技术相比,本技术提供的基于无人机的农业种植管理系统及其方法,其利用待检测叶片目标区域图像和数据库中参考叶片图像在高维特征空间中的全局性差异分布信息来判断病虫害的类型并根据判断的病虫害类型来采取对应的防治措施。这样,有效地提高了叶片病虫害识别的效率和准确率,提高了农业生产的效率
- 还没有人留言评论。精彩留言会获得点赞!