一种基于决策过程的不确定性CPS建模与验证方法
本技术属于信息物理融合,具体涉及一种基于决策过程的不确定性cps建模与验证方法。
背景技术:
1、不确定性理论是建立不确定计算模型的理论基础。经典计算模型主要是指经典自动机,包括有穷自动机和图灵机。自动机理论是计算机科学的基础理论之一,其应用主要体现在程序设计语言、网络技术、自然语言的处理、人工智能等领域。加权自动机是应用比较广泛的一类不确定计算模型,其理论与应用研究较为丰富。在不确定性理论中不确定性信息可以用概率的、可能的、模糊的、粗糙的等测度进行度量。但随着社会的发展,目前已经出现了处理很多不确定性的计算方法,并且是超越图灵机运算的,特别是近几年新兴的物联网,其关键技术之一便是不确定计算与不确定推理。这就推动一些科研工作者尝试将不确定性计算模型用于信息物理融合系统(cyber-physical systems,简称cps)研究领域,也希望在信息物理融合系统的可靠计算和实时智能控制方面发挥一定作用。而不确定性数据管理和智能计算是cps计算系统面临的首要问题。
2、目前不确定cps的建模技术在遇到复杂系统出现的多重可能性分布时,会出现系统行为的不确定性,即导致系统无法正确处理不确定性数据,系统模型的可靠性较低。同时,在建模完成后,现有技术难以验证cps的活性和安全性,缺乏一种对不确定性cps属性的动态验证分析手段。
技术实现思路
1、为此,本技术提供一种基于决策过程的不确定性cps建模与验证方法,有助于解决现有技术在cps建模时会出现系统的不确定性,难以处理不确定性数据,且难以验证cps的活性和安全性的问题。
2、为实现以上目的,本技术采用如下技术方案:
3、本技术提供一种基于决策过程的不确定性cps建模与验证方法,包括:
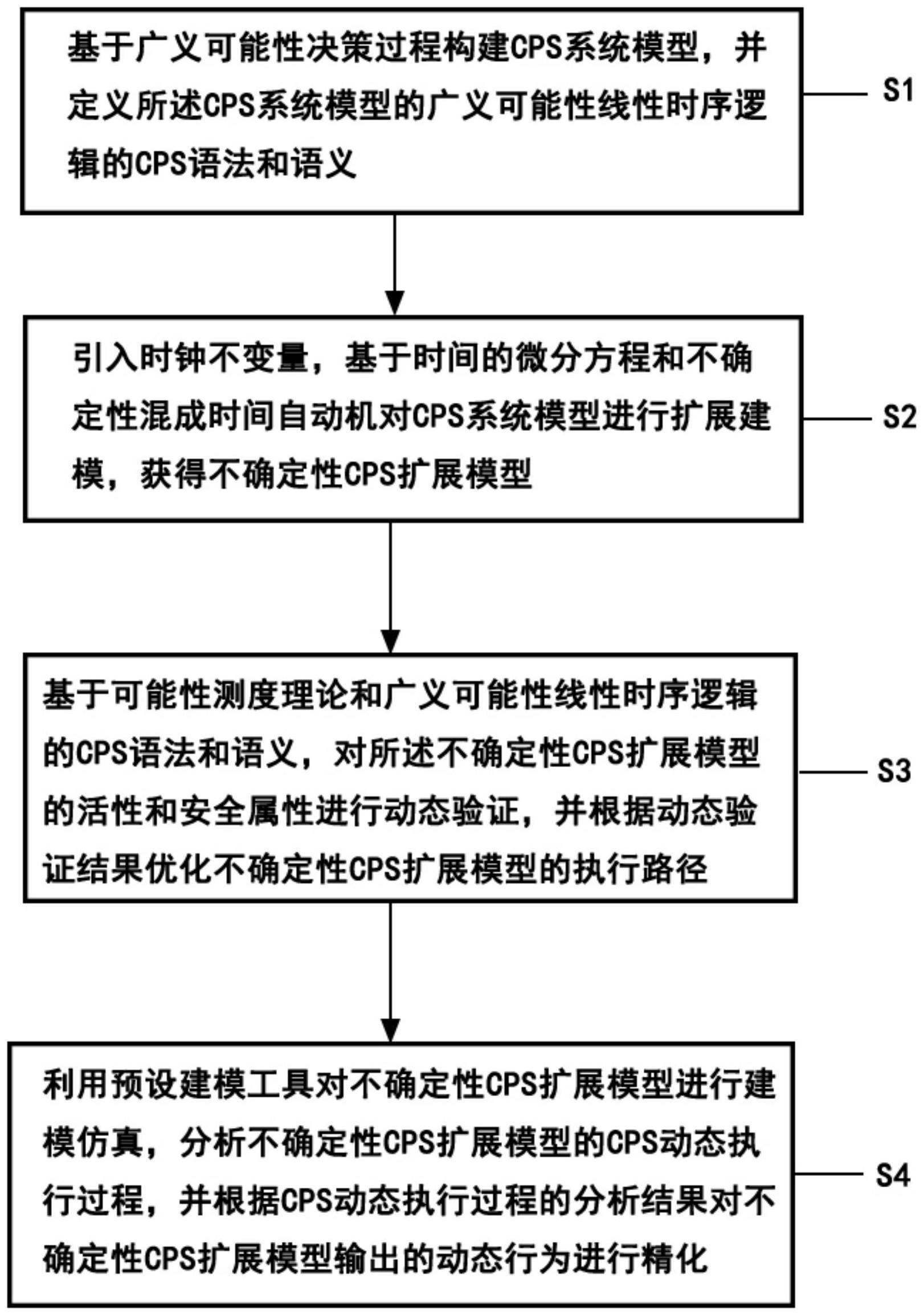
4、基于广义可能性决策过程构建cps系统模型,并定义所述cps系统模型的广义可能性线性时序逻辑的cps语法和语义;
5、引入时钟不变量,基于时间的微分方程和不确定性混成时间自动机对cps系统模型进行扩展建模,获得不确定性cps扩展模型;
6、基于可能性测度理论和广义可能性线性时序逻辑的cps语法和语义,对所述不确定性cps扩展模型的活性和安全属性进行动态验证,并根据动态验证结果优化不确定性cps扩展模型的执行路径;
7、利用预设建模工具对不确定性cps扩展模型进行建模仿真,分析不确定性cps扩展模型的cps动态执行过程,并根据cps动态执行过程的分析结果对不确定性cps扩展模型输出的动态行为进行精化。
8、进一步地,所述基于广义可能性决策过程构建cps系统模型,并定义所述cps系统模型的广义可能性线性时序逻辑的cps语法和语义,具体包括:
9、以广义可能性决策过程为系统模型,构建cps系统模型;所述广义可能性决策过程具体为一个六元组m=(s,act,p,i,ap,l),其中,s是一个可数非空状态之集;act是一个动作集;p是可能性转移函数,p:s×act×t→[0,1],对于每个状态s∈s,t∈t,都存在一个动作α∈act,使得p(s,α,t)>0;i是一个可能性初始分布函数;ap是一组原子命题集;l是一个可能性标签函数;
10、基于状态s,分别确定广义可能性决策过程中以状态s开始的无限路径片段的集合paths(s)和以状态s开始的有限路径片段的集合pathsfin(s);
11、预先设置所述六元组m的策略,并将策略定义为函数ζ;
12、基于原子命题集ap,定义cps系统模型的广义可能性线性时序逻辑的cps语法,cps语法如下式所示:
13、其中r是可能性的区间取值,r∈[0,1],a∈ap;
14、依据所述cps语法,分别定义广义可能性线性时序逻辑的语言语义和路径语义。
15、进一步地,所述引入时钟不变量,基于时间的微分方程和不确定性混成时间自动机对cps系统模型进行扩展建模,获得不确定性cps扩展模型,具体包括:
16、基于时间的微分方程,对不确定性cps系统动态行为建模,描述系统的动态性;
17、将时钟不变量和可能性引入混成自动机,获得不确定性混成时间自动机,并基于不确定性混成时间自动机构建不确定性混成时间自动机系统模型;
18、所述不确定性混成时间自动机具体为一个九元组hp,如下式所示:
19、hp=(i,o,t,init,mcon,{ax|x∈i},{ay|y∈o},a,ci)
20、其中,i为输入端口可能值的集合;o为输出端口所有可能值的集合;t为状态变量集合,定义状态集合为qt;init是可能性初始化分布操作,定义可能性初始状态集合[init]≤qt;mcon为控制模式之集;a为内部动作之集;ci为一个时钟不变量;
21、结合不确定性cps系统动态行为建模结果和不确定性混成时间自动机系统模型,获得不确定性cps扩展模型。
22、进一步地,所述基于可能性测度理论和广义可能性线性时序逻辑的cps语法和语义,对所述不确定性cps扩展模型的活性和安全属性进行动态验证,并根据动态验证结果优化不确定性cps扩展模型的执行路径具体包括:
23、利用广义可能性线性时序逻辑的cps语法和语义刻画描述不确定性cps扩展模型在表达执行过程中状态标签之间的活性;所述活性包括最终可达性、总是可达性、重复可达性和持久可达性;
24、基于可能性测度,计算不确定性cps扩展模型中带策略的执行路径满足广义可能性线性时序逻辑的cps语法和语义刻画描述的最终可达性、总是可达性、重复可达性和持久可达性的可能性,该过程具体包括:
25、计算模型满足最终可达性的广义可能性测度,表示为:
26、
27、计算模型满足总是可达性的广义可能性测度,表示为:
28、
29、计算系统满足重复可达性的广义可能性测度,表示为:
30、
31、计算系统满足持久可达性的广义可能性测度,表示为:
32、
33、其中,poζ表示不确定性系统模型q的广义可能性测度;s是一个可数非空状态之集,s表示不确定性cps系统的一个状态;π表示不确定性cps系统的动态执行轨迹;i和j分别表示带策略的执行路径中的两个位置;si和sj分别表示在不确定性cps系统中,带策略的执行路径中的第i个状态和第j个状态;ζ-path表示带有策略的执行路径;◇b表示最终可达性;b表示总是可达性;◇b表示重复可达性;◇b表示持久可达性;
34、定义不确定性cps扩展模型的模糊正则安全属性psafe,基于可能性测度理论计算模糊正则安全属性psafe的广义可能性测度,并判断模糊正则安全属性psafe中任意无限串σ中是否含有坏的前缀,若含有坏的前缀,则模糊正则安全属性psafe是不安全,对不确定性cps扩展模型存在的不符合要求行为进行优化;若不含有坏的前缀,则模糊正则安全属性psafe是安全的。
35、进一步地,所述预设建模工具具体为ptolemy ii仿真建模工具。
36、进一步地,所述对不确定性cps扩展模型输出的动态行为进行精化具体为:将不确定性cps扩展模型输出的动态行为作为下一个输入动态行为的一个函数。
37、本技术采用以上技术方案,至少具备以下有益效果:
38、通过本技术提供的基于决策过程的不确定性cps建模与验证方法,方法基于广义可能性决策过程构建cps系统模型,并定义所述cps系统模型的广义可能性线性时序逻辑的cps语法和语义;引入时钟不变量,基于时间的微分方程和不确定性混成时间自动机对cps系统模型进行扩展建模,获得不确定性cps扩展模型;基于可能性测度理论和广义可能性线性时序逻辑的cps语法和语义,对所述不确定性cps扩展模型的活性和安全属性进行动态验证,并根据动态验证结果优化不确定性cps扩展模型的执行路径;利用预设建模工具对不确定性cps扩展模型进行建模仿真,分析不确定性cps扩展模型的cps动态执行过程,并根据cps动态执行过程的分析结果对不确定性cps扩展模型输出的动态行为进行精化。本技术引入描述不确定性cps行为,通过策略对不确定性的选择进行决策,同时定义了具有决策过程的广义可能性线性时序逻辑的cps语法和语义,通过可能性测度理论验证了该系统的活性和安全属性,最后通过系统进行建模并对cps系统进行仿真实验,既能有效的将连续时间模型信息化、离散化,又能将离散事件模型物理化、连续化。此时,本技术通过基于时间的微分方程描述系统的动态连续特性和基于时间状态机来表示不确定性混成系统的建模,使每个状态内部能用基于时间的状态精化来描述。
39、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!