一种考虑连续海浪扰动的船用旋转起重机实时轨迹规划方法
本发明属于欠驱动系统领域,涉及欠驱动起重机系统运动控制技术,具体涉及一种考虑连续海浪扰动的船用旋转起重机实时轨迹规划方法。
背景技术:
1、欠驱动系统是一类输入小于输出的系统。欠驱动系统的控制问题一直是一个具有挑战性的问题,欠驱动系统控制问题的研究有助于不完全约束系统控制理论的发展。许多学者致力于欠驱动系统的研究。船用起重机作为一种必不可少的机电系统,在货物的生产、转移和运输中发挥着越来越重要的作用。作为一种欠驱动系统,船用起重机在执行载荷运输任务时往往表现出复杂的动力学特性。同时,由于工作环境的特殊性,与陆用固定起重机相比,船用起重机会受到更复杂的外部干扰。当船舶受到风、浪等海洋环境的影响时,会产生高达6个自由度方向(偏航、摇摆、浪涌、俯仰、横摇和升沉)的扰动,影响起重机运输载荷的定位效果,使载荷摆角发生晃动,并可能进一步导致安全事故。
2、在过去的几十年里,陆用起重机的控制问题得到了广泛的研究,研究者提出了许多有意义的控制方法,包括轨迹规划、滑模控制、输入整形控制、自适应控制、最优控制等。然而,由于工作环境的复杂性,现有的陆用起重机控制策略不能直接适用于船载起重机的控制问题。因此,有必要对船用起重机在海面扰动作用下的控制方法进行研究。
3、通过对以往针对船用旋转起重机控制算法的分析,我们发现了以下几个需要解决的难点:
4、1)与实际海况对船载起重机平台产生的复杂扰动相比,现有文献简化了扰动的影响,只研究了实际扰动在一个或两个方向上的扰动分量。在恶劣的海况下,所提出的控制算法可能无法进行有效的定位。
5、2)实际的起重机绳长通常是时变的,这是许多控制器设计过程中没有考虑到的。随着钢丝绳长度的变化,起重机系统的固有频率也会发生变化,这大大增加了系统的复杂性。因此,对绳长时变问题进行研究是十分必要的。但是船用旋转起重机是一种常见的欠驱动系统,控制变量多,干扰复杂。如果再考虑绳长的变化,将进一步加强系统的耦合性,使控制问题的研究成为一项非常困难的任务。
6、3)在实验验证中,通常通过在匹配通道中输入干扰信号来模拟实际干扰。实际的扰动往往是复杂的,这种方法通常不能完全验证所提出方法的实用性。
技术实现思路
1、发明目的:为了克服现有技术中存在的不足,提供一种考虑连续海浪扰动的船用旋转起重机实时轨迹规划方法。
2、技术方案:为实现上述目的,本发明提供一种考虑连续海浪扰动的船用旋转起重机实时轨迹规划方法,包括如下步骤:
3、s1:基于拉格朗日动力学方程建立考虑连续海浪扰动的五自由度船用旋转起重机数学模型并分析其动力学特性;
4、s2:根据船用旋转起重机数学模型的动力学特性设计扰动观测器;
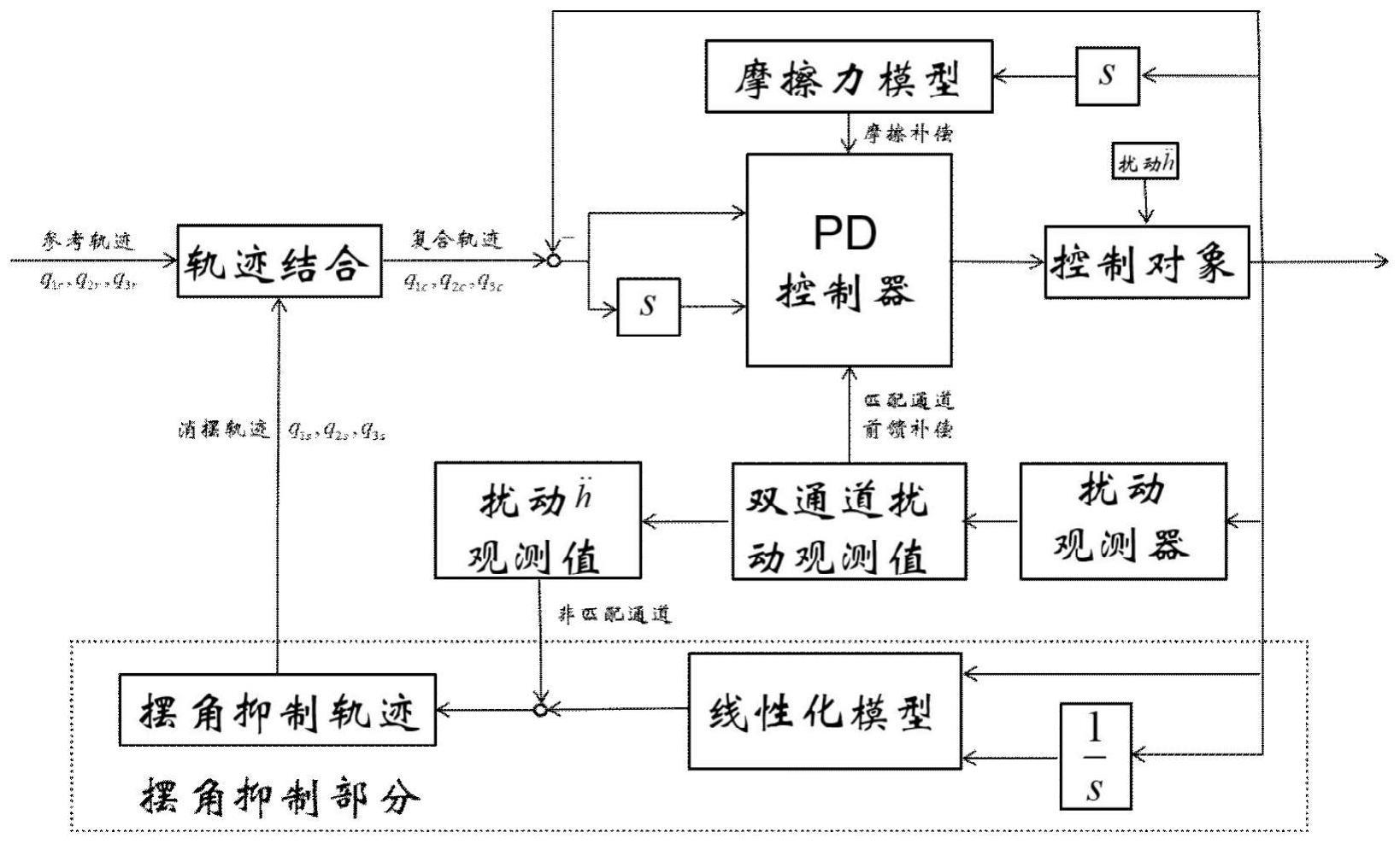
5、s3:选取参考轨迹,并且通过扰动观测器设计摆角抑制轨迹,将参考轨迹和摆角抑制轨迹进行结合形成复合轨迹;
6、s4:基于船用旋转起重机数学模型、扰动观测器设计pd控制器;
7、s5:根据复合轨迹,利用pd控制器输出船用旋转起重机实时轨迹。
8、进一步地,所述步骤s1中考虑连续海浪扰动的五自由度船用旋转起重机数学模型的表示如下:
9、
10、
11、q1=θ1-α,q2=θ2-β,q3=l(t),q4=θ3-α,q5=θ4-β,
12、其中,ms(q)为船用旋转起重机系统的惯性矩阵,为向心-科里奥利矩阵,g(q)为重力矢量,τ为控制输入矢量,τf为船用旋转起重机系统的机械摩擦力,悬臂的变幅角和旋转角分别为θ1和θ2,船舶的横摇角,偏航角以及升沉扰动分别为α,β和h,负载的径向摆角和切向摆角分别为θ3和θ4,q为耦合之后系统新的状态变量,q1和q2为耦合后的悬臂变幅角和旋转角,q4和q5为耦合后的负载的径向摆角和切向摆角,为一阶导数,为其二阶导数;m与m分别为悬臂和负载的质量,l与l分别为悬臂的长度与吊绳的长度,g为重力加速度,对于驱动力/转矩,τ1为悬臂起幅方向驱动扭矩,τ2为悬臂水平旋转方向驱动扭矩,τ3为悬绳垂直方向驱动扭矩,τ1f,τ2f和τ3f分别为悬臂起幅方向和水平旋转方向的机械摩擦力和悬绳垂直方向的机械摩擦力,d*(1,...,5)为船舶升沉引起的扰动。
13、进一步地,所述步骤s1中动力学特性包括悬臂定位特性以及摆角摆动特性;在船用旋转起重机运动过程中,存在两个方向的扭矩,其一个方向是悬臂起幅方向的扭矩,另一个方向是悬臂水平旋转方向的转动扭矩;这时,由于离心运动的参与,使系统动力学特性变得十分复杂,同时,由于海浪运动的干扰,起重机系统的负载摆动特性更加复杂,通过分析海浪扰动对船用旋转起重机各个驱动力方向上的影响,将海浪运动产生的持续偏航角度和悬臂水平旋转方向的角度进行耦合,将海浪运动产生的横摇扰动角度和悬臂起幅方向的角度进行耦合,海浪运动产生的升沉方向的扰动则通过扰动观测器进行跟踪,实现了在海浪影响下的负载精确定位和摆角的抑制目标。
14、进一步地,所述步骤s1中船用旋转起重机数学模型包括摩擦力前馈补偿模型,摩擦力前馈补偿模型的表达如下:
15、
16、
17、
18、其中,f11、f12、f21、f22、f31、f32为摩擦力前馈补偿模型的参数,f11、f12和f13的值与最大静摩擦力对应,f21f22和f23是粘性摩擦系数,ε是静态摩擦系数。
19、进一步地,所述步骤s2中设计的扰动观测器为非线性扰动观测器,具体为:
20、
21、
22、d=ms(q)-1d*
23、其中:p=[p1 p2 p3 p4 p5]t,是对与升沉扰动有关的量d的估计;p是辅助向量,l1是r5×5的常数矩阵,其中p和l1里的都是可选取的常数。
24、进一步地,所述步骤s3中参考轨迹为s型轨迹,表示为:
25、
26、
27、其中,x表示耦合后的悬臂起幅角度q1或者耦合后的水平旋转角度q2;q(x)d,q(x)0和tq(χ)d分别为悬臂起幅角度和旋转目标角度/位置、初始角度/位置和到达时间。
28、进一步地,所述步骤s3中摆角抑制轨迹的设计包括如下:
29、对动力学方程进行线性化处理:
30、
31、
32、
33、
34、
35、设计如下李雅普诺夫函数:
36、
37、对李雅普诺夫方程vt进行求导,并且进行数学转换:
38、
39、为了满足设计了如下的摆角抑制轨迹:
40、
41、
42、其中,q1r(t)、q2r(t)以及q3r(t)分别是起伏角、旋转角以及绳长的参考轨迹,其数学公式是s形轨迹;
43、对上式进行积分,得到:
44、
45、
46、其中,
47、进一步地,所述步骤s3中复合轨迹的表达如下:
48、
49、
50、q3c(t)=q3r(t)。
51、进一步地,扰动观测器还包括李雅普诺夫方程:
52、
53、其中:为扰动估计误差值;
54、对李雅普诺夫方程v1进行求导:
55、
56、得出
57、
58、其中,p1是一个正定对称矩阵,q1是一个正定矩阵,λm是一个可调矩阵。
59、进一步地,所述步骤s4中pd控制器的表达如下:
60、
61、
62、
63、其中,e1=q1-q1c,e2=q2-q2c,e3=q3-q3c为误差信号,是双通道扰动观测器所得的匹配扰动估计值,通过使用上述的pd控制器去跟踪复合轨迹,通过pd控制器中的实现了对匹配扰动的抑制,通过复合轨迹中与有关的量,实现了对升沉扰动引起的摆角的抑制。
64、为了克服背景技术中提出的问题,本发明提供的一种考虑连续海浪扰动的船用旋转起重机实时轨迹规划方法主要包括如下两个方面:
65、1、研究了五自由度船用旋转起重机在连续偏航、横摇和升沉作用下的动力学特性,与以往的模型将波动扰动视为集中扰动不同,该模型在建模中考虑了来自三个不同方向的扰动,使得不同方向的扰动对整个系统的影响非常清晰,这对控制器分析非常有利。
66、2、将扰动观测器与实时轨迹规划相结合,将参考轨迹与摆角抑制轨迹相结合,在精确定位的同时实现了摆角抑制。
67、基于上述内容,本发明主要解决的技术问题是:在受到船舶持续偏航,横摇以及升沉扰动时,船用旋转起重机的负载摆动特性会变得十分复杂,这使得系统动力学模型会变得更加复杂,在实现悬臂与负载的准确定位同时,不能快速抑制负载的摆动。
68、有益效果:本发明与现有技术相比,通过耦合可测量的船舶偏航和横摇扰动,采用的观测器通过对状态变量、辅助变量和控制输入进行积分,克服了标准级联动力学模型无法描述欠驱动系统的困难,实现了对升沉扰动的估计并保证误差值在很小的区间内。在此基础上结合动力学方程,得到实际的升沉扰动加速度信号。同时将参考轨迹与摆角抑制轨迹相结合,最终能够实现高效的轨迹跟踪与摆动抑制,从而达到控制效果。
- 还没有人留言评论。精彩留言会获得点赞!