一种基于轮式移动机器人速度和振动状态的地形可通过性预测方法
本发明属于轮式移动机器人感知决策领域,具体涉及一种基于轮式移动机器人速度和振动状态的地形可通过性预测方法。
背景技术:
1、轮式移动机器人在搜救、行星探测、侦察和运输等领域中被广泛应用。然而,在非结构化地形中,轮式移动机器人必须能够预测哪些区域是安全可通过的,并据此规划可行路径。因此,准确预测地形的可通过性对于轮式机器人执行导航和探索任务至关重要。目前,预测地形可通过性的方法主要基于地形外观特征或机器人自身的运动状态构建地形可通过性评估模型。然而,这些方法往往假设机器人速度为固定值或作为运动状态的条件,并很少关注机器人运动速度对地形可通过性程度的影响。尤其对于轮式移动机器人而言,在以不同速度通过相同地形时,地形的可通过性程度显著变化。对于较为平坦的地形,机器人可以以较高速度安全通过;而对于较为崎岖的地形,机器人则需要以较慢的速度通过,而不是简单地绕行。因此,研究轮式移动机器人速度对地形可通过性程度的影响对于实现机器人高效且安全的导航具有重要意义。这种研究将使机器人能够根据地形特征和运动速度来精确预测可通过区域,有效规划路径,并最大程度地提升导航任务的成功率和安全性。
技术实现思路
1、本发明解决的问题是轮式机器人能够根据地形的高程地图,以及不同的指令速度,构建机器人在不同运动速度下,局部地形的可通过性地图,提高轮式机器人在复杂地形下的运动效率。
2、为了解决上述问题,本发明通过以下技术方案实现:本发明提供了一种基于轮式移动机器人速度和振动状态的地形可通过性预测方法,具体包括以下步骤:
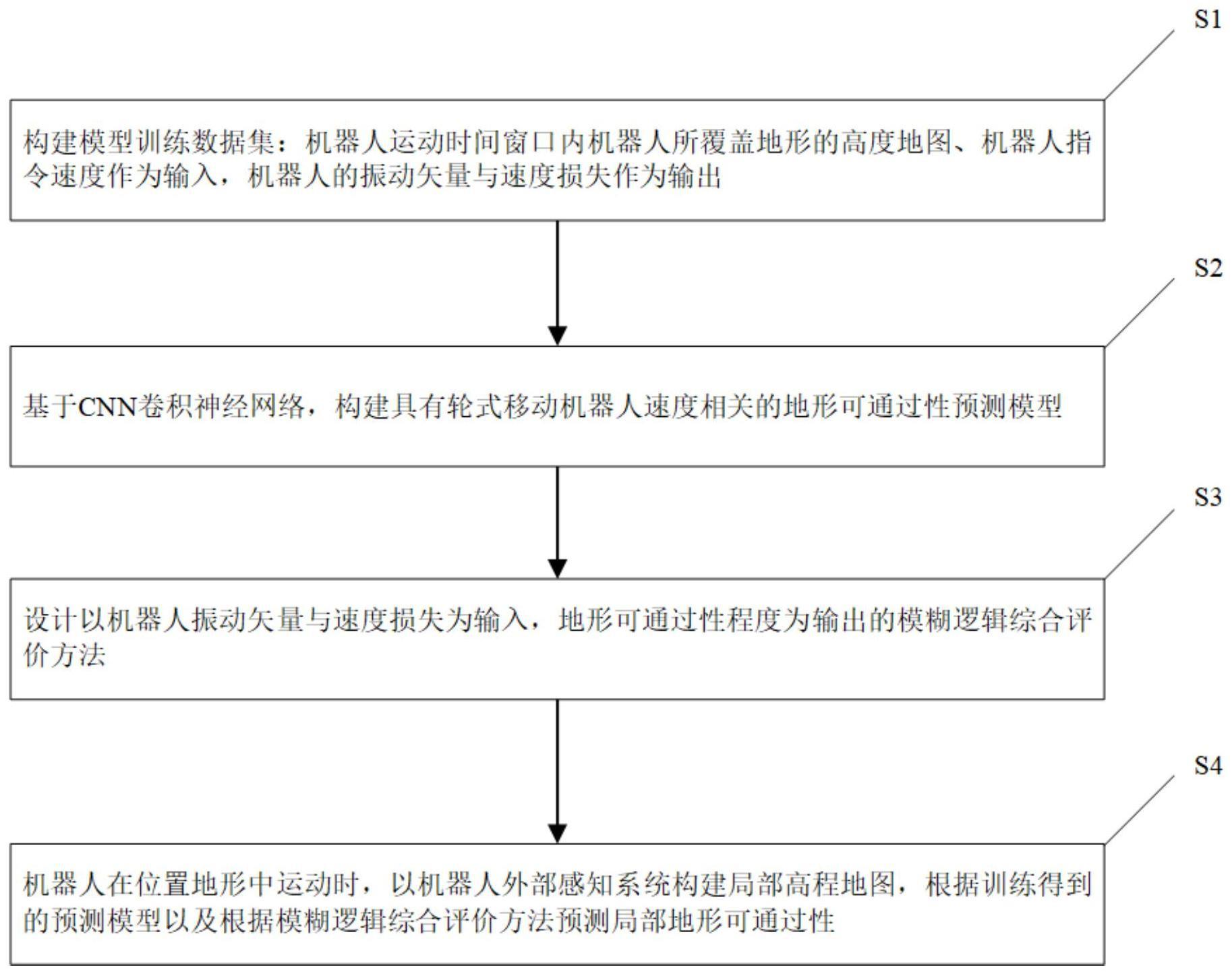
3、步骤1:通过移动机器人在多个根据高度图构建的高保真复杂仿真地形中以不同指令速度持续运动获得样本数据集来训练cnn卷积神经网络,所述的数据集包括机器人运动时间窗口内机器人所覆盖地形的高度地图、机器人指令速度作为输入,以及机器人的振动矢量和速度损失作为输出;
4、具体的训练样本数据集的构建方法主要是在仿真环境中随机未知处生成,并且以随机的行进轨迹即随机的指令速度与方向使机器人在仿真环境中运动,在相同的时间窗口中采集机器人所覆盖地形处的高程地图、机器人当前的运动速度以及机器人振动矢量和速度损失数据,直至机器人运动到地图的边界或出现侧翻、卡住等情况时停止数据采集,其中出现侧翻或卡住等情况时,标记当前的地形为不可通过,即振动矢量和速度损失都为最大值。
5、步骤2:基于cnn卷积神经网络,构建具有轮式移动机器人速度相关的地形可通过性预测模型;将步骤1中得到的训练样本数据集送入到预测模型中进行训练;
6、步骤3:利用模糊逻辑方法综合评价步骤2中的得到的cnn预测模型的振动矢量和速度损失输出,计算地形的可通过性程度;
7、步骤4:机器人在未知地形中运动时,根据机器人外部感知系统获得的深度图像与三维点云数据,构建局部高程地图,并根据步骤2中得到的预测模型以及步骤3中的综合评价方法预测局部地形可通过性;
8、根据构建的局部高程地图,以数据采集时采用的时间窗口大小作为滑动窗口的尺寸,使滑动窗口在高程地图的顶点开始滑动,将滑动窗口中高程地图作为步骤2中训练得到的cnn卷积神经网络模型的输入,同时,将机器人的速度范围离散为k个指令速度,将k个指令速度也作为模型的输入,可以预测出对应滑动窗口处机器人针对对应指令速度的振动矢量和速度损失,再通过步骤3中的综合评价方法,得到对应指令速度的地形可通过性程度。滑动窗口遍历完整个局部高程地图后,便可得到速度相关的局部地形可通过性分布情况。
技术特征:
1.一种基于轮式移动机器人速度和振动状态的地形可通过性预测方法,其构建过程特征在于以下步骤:
2.根据权利要求1所述的一种基于轮式移动机器人速度和振动状态的地形可通过性预测方法,其特征在于,所述步骤1中cnn预测网络模型输入指标的测量或计算方法如下:机器人所覆盖地形的高度地图mheight由高保真地图中机器人所在位置处,尺寸为机器人机体面积大小的高度图块表示;输入指标的测量或计算方法如下:振动矢量定义为机器人行驶时间窗口内滚动和俯仰角加速度的标准偏差即其中为滚动角,为俯仰角,由搭载在机器人中心位置处的imu测得;速度损失定义为时间窗口内机器人实际速度平均值与指令速度绝对差值与指令速度之比,即其中vmean为单位时间窗口内速度标量的平均值,v为机器人实际速度可由安装在机器人底盘中心的惯性测量单元实时给出。模型输入输出数据采集具有以下特征:数据采集在一个时间窗口t内的数据定义为一个样本,采样频率为1hz。
3.根据权利要求1所述的一种基于轮式移动机器人速度和振动状态的地形可通过性预测方法,所述步骤2中的可通过性预测模型采用基于cnn卷积神经网络的深度学习框架,其具体步骤为:
4.根据权利要求1所述的一种基于轮式移动机器人速度和振动状态的地形可通过性预测方法,其特征在于,所述步骤3中,通过模糊逻辑的方法,根据振动矢量与速度损失综合评价得到地形可通过性程度的具体步骤为:
5.根据权利要求1所述的一种基于轮式移动机器人速度和振动状态的地形可通过性预测方法,其特征在于,所述步骤4中预测不同指令速度对应的局部地形可通过性方式如下:
技术总结
本发明属于轮式移动机器人感知决策领域。本发明公开了一种基于轮式移动机器人速度和振动状态的地形可通过性预测方法,解决了轮式机器人以不同指令速度通过地形时,地形可通过性程度不同的问题,具体方法为:以高度地图和指令速度做输入,机器人振动矢量和速度损失做输出,构建用于训练CNN网络的数据集;经训练得到的CNN预测模型的输出作为模糊逻辑算法的输入,综合评价地形可通过性;预测阶段,根据预测模型以及综合评价方法,以不同指令速度和局部高程地图作为输入,预测对应速度下局部地形的可通过性。本发明使机器人在执行运动规划前,提供不同速度对应不同局部地形可通过性的分布情况作为先验条件,提高了轮式机器人导航的高效性和安全性。
技术研发人员:尤波,邵英颉,李佳钰,陈晨,程晨晨
受保护的技术使用者:哈尔滨理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!