一种基于空间结构特征的输电杆塔塔头塔身点云分割方法
本发明涉及输电线路三维建模技术中点云分割领域,尤其是涉及一种基于空间结构特征的输电杆塔塔头塔身点云分割方法。
背景技术:
1、输电工程数字化的重点是三维模型和数据的创建方法,三维模型中的杆塔模型是必不可少的一个部分。目前机载lidar已经广泛的应用在电力巡线中,基础点云不能直接进行仿真模拟分析和模型可视化,需要将点云转化为三维模型。对lidar数据转化为三维模型时,将塔头塔身进行分别建模是当前通用的输电杆塔三维建模的主要方法,所以正确的将塔头塔身进行分割是对杆塔点云进行三维建模过程中必不可少的一个步骤,对后续建模准确度起决定作,所以从机载lidar点云建立三维杆塔模型的自动化方法是非常有必要性的。
2、周提出了基于局部最大密度、局部最小长度的塔头塔身分割方法,该方法面对不同的点云数据需要更改相关阈值(参考:zhour,jiangw,huangw,xub,jiangs.aheuristicmethod forpowerpylonreconstructionfromairbornelidardata[j].remotesensing,2017,9(11):1172.)。陈提出了基于局部最大点密度、高填充率、形状参数的塔头塔身分割方法,该方法引入了填充率特征,增加了判断分割位置的特征降低了分割错误的概率(参考:chens,wangc,daih,zhangh,panf,xix,yany,wangp,yangx,zhux,abena.powerpylon reconstructionbasedonabstracttemplatestructuresusingairbornelidardata[j].remotesensing,2019,11(13):1579.)。习基于局部最大点密度、高填充率的向量凹凸性判别塔头塔身分割的方法,引入了向量计算、角度阈值、凹凸性计算来对杆塔关键位置进行分割(参考:qiaoy,xix,nies,wangp,guoh,wangc.powerpylonreconstructionfrom airbornelidardatabasedoncomponentsegmentationand modelmatching[j].remotesensing,2022,14(19):4905.)。以上三种方法通过分析局部点云数据识别特征进行塔头塔身分割,高度依赖点云的局部特征吗,忽略了杆塔的整体形状结构特征,高度依赖任何一个特征条件。因此,以局部数据统计为基础的杆塔分割是无法满足多样性数据处理的要求。
3、综上,本发明提出的一种基于空间结构特征的输电杆塔塔头塔身点云分割方法,可有效解决输电杆塔自动化建模问题中的杆塔点云塔头和塔身分割问题,对提升输电杆塔建模的效率具有十分重要的意义。
技术实现思路
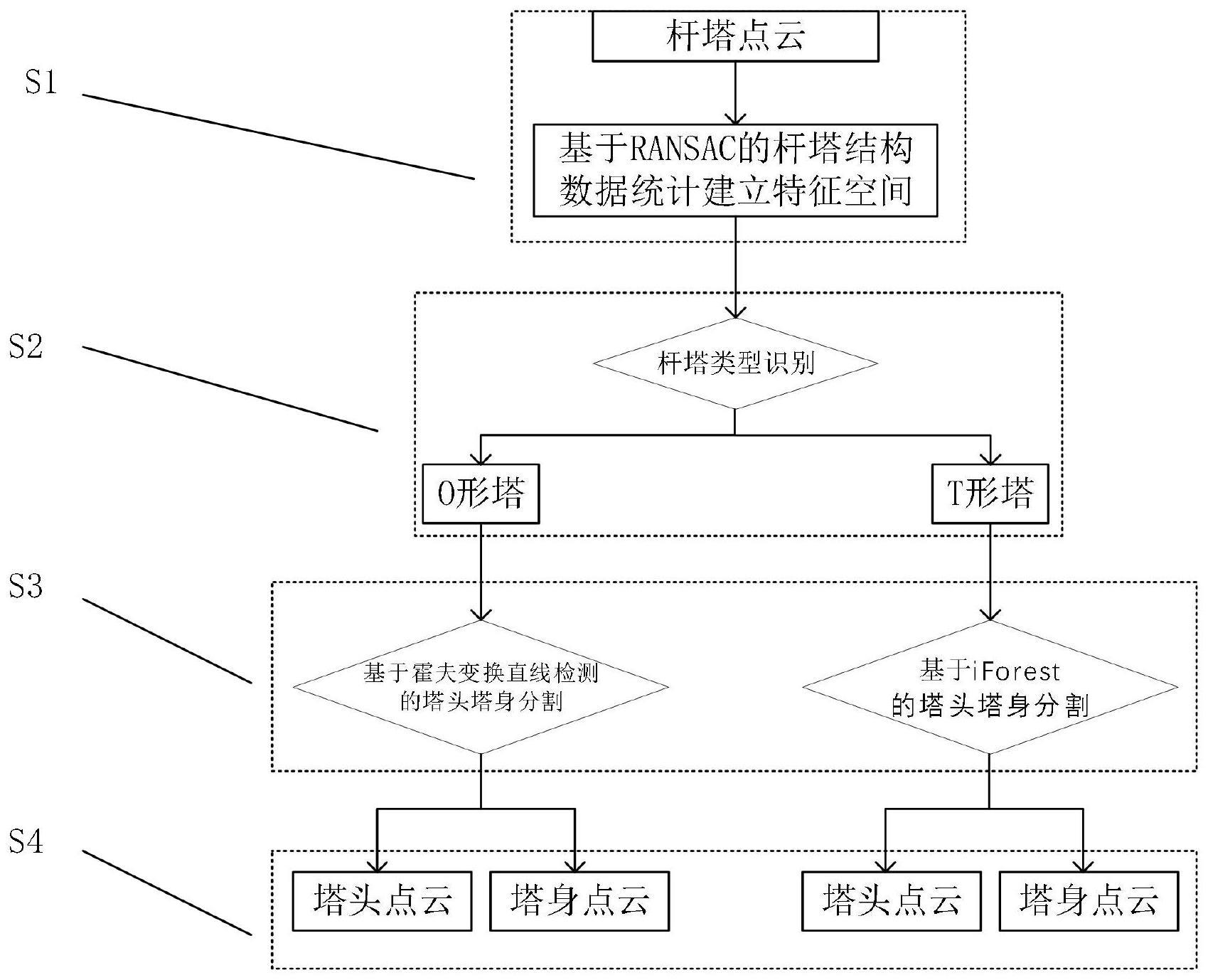
1、针对上述技术问题,本发明的目的在于克服已有技术的不足之处,提出一种基于空间结构特征的输电杆塔塔头塔身点云分割方法,包括对杆塔三维点云建立特征空间;采用形状参数特征将杆塔分为t型和o型两类;对t型塔采用孤立森林异常点检测识别分割位置;对o型塔分别和采用霍夫变换直线检测检测分割位置。实现输电杆塔点云的塔头塔身分割,成果可应用于电网模型构建过程中的三维设计、可视化与管理等领域。
2、为实现上述目的,本发明提供了一种基于空间结构特征的输电杆塔塔头塔身点云分割方法,包括如下步骤:
3、s1:对输电杆塔点云在高度方向平均分层,采用ransac对杆塔四条主腿进行连续线拟合,统计杆塔四条主腿范围之外的点云数量生成统计数据,将杆塔点云结构特征投影到特征空间进行表达;
4、s2:对步骤s1所得结果的分层输电杆塔点云采用基于形状参数方法进行形状识别得到t型塔统计数据和o型塔统计数据;
5、s3:将步骤s2所得结果的t型塔采用孤立森林离散点检测方法获取分割候选位置,o型塔采用基于霍夫变换直线检测方法的变获取分割候选位置;
6、s4:对步骤s3所得结果的分割位置,对输入的杆塔点云按位置进行分割获得塔头点云和塔身点云,根据从特征空间获取的t型塔点云的分割位置数据点和o型塔点云的分割位置数据点,还原到分层点云数据中,获取分割数据点的对应的点云层数,将该层点云下放的所有点云输出为塔身点云,将该层点云及上方所有点云输出为塔头点云。
7、优选的,所述步骤s1中对输电杆塔点云在高度方向平均分层,采用ransac对杆塔四条主腿进行连续线拟合,统计杆塔四条主腿范围之外的点云数量生成统计数据,将杆塔点云结构特征投影到特征空间进行表达,包括以下方法和步骤:
8、(1)对杆塔点云分层:对杆塔点云选取高度h将所有点云安装垂直方向分为多层;
9、(2)ransac拟合主腿:使用凸包算法提取0.5杆塔高度以下的每层点云的多边形,对获得的多边形使用多边形简化算法简化为四边形,对所有层的四边形四个角点按照方向划分为四个子集,使用ransac算法对每个子集拟合直线并延长到塔顶。
10、(3)生成特征空间表达:根据四条拟合好的主腿划定每层点云的范围,统计位于四条主腿范围之外的点云数量,按照层数给出统计数据,对每层的统计结果按照从塔腿到塔顶排序生成特征空间表达。
11、优选的,所述步骤s2中对步骤s1所得结果的分层输电杆塔点云采用基于形状参数方法进行形状识别得到t型塔统计数据和o型塔统计数据,主要包括以下方法和步骤:
12、(1)形状参数计算:选取0.3倍杆塔高度时该层点云的宽度求得上下五层平均宽度,将该宽度范围外的点剔除生成新的点云数据,将生成的新的点云数据获取每层点数,计算点数与宽度的比值为填充率;
13、(2)t、o塔型识别:设定填充率阈值a,设定层数阈值b,当存在连续的小于a填充率且大于等于b层认定该杆塔为o型塔,否则为t型塔。
14、优选的,所述步骤s3中将步骤s2所得结果的t型塔采用孤立森林离散点检测方法获取分割候选位置,o型塔采用基于霍夫变换直线检测方法的变获取分割候选位置,主要包括以下方法和步骤:
15、(1)获取t型塔分割位置:对t型塔统计数据随机选择一个特征和该特征的分割值来创建二叉树,对每个子集递归地重复该过程,计算每个数据点的异常分数,获得所有数据点的异常分数的合集,取-0.2作为异常分数的经验阈值,将定初始阈值将数据分为两类,计算两类数据的方差,当方差最大时取该阈值,选取异常分数大于该阈值的数据点作为分割候选位置,选取第一个数据点为t型塔点云的分割位置数据点;
16、(2)获取o型塔分割位置:使用霍夫变换直线检测对o型塔数据进行直线检测,限定直线为0度直线,检测所有数据点与获得的直线的位置关系,当连续出现数据点位于直线上方,认定第一个数据点为o型塔点云的分割位置数据点。
17、优选的,所述步骤s4中对步骤s3所得结果的分割位置,对输入的杆塔点云按位置进行分割获得塔头点云和塔身点云具体描述为:根据从特征空间获取的t型塔点云的分割位置数据点和o型塔点云的分割位置数据点,还原到分层点云数据中,获取分割数据点的对应的点云层数,将该层点云下放的所有点云输出为塔身点云,将该层点云及上方所有点云输出为塔头点云。
18、由上,本发明的一种基于空间结构特征的输电杆塔塔头塔身点云分割方法,将输电杆塔点云分割为塔头点云和塔身点云,分割精度高、抗鲁棒性强。本发明方法的处理过程没有近似,实现三维点云数据到三维模型的转换,成果可应用于电网模型构建过程中的三维设计、可视化与管理等领域。
- 还没有人留言评论。精彩留言会获得点赞!