一种基于高斯过程的多传感器布局方法及装置
本发明涉及传感器布局,特别是指一种基于高斯过程的多传感器布局方法及装置。
背景技术:
1、传感器网络在环境监测中发挥着越来越重要的作用,如探索海洋和陆地上的生态系统变化、监测空气质量和污染、监测森林火灾、监测室内环境等。众所周知,传感器节点部署越密集,传感器网络越能全面感知整个目标区域,但当在监测位置部署过多的传感器时,这些传感器会生成类似的数据样本,从而在测量数据中产生较大的冗余。在长期监测的过程中,过多的传感器数量以及冗余测量会给传感器网络带来许多问题,如较高的安装维护成本、较高的能耗,并且会极大的提高数据分析的复杂性,增加计算成本。因此如何将较少数量的传感器布局在合适的节点,从而高效监测目标区域,收集有效信息是传感器研究的一大目标。
技术实现思路
1、本发明提供了一种基于高斯过程的多传感器布局方法及装置。所述技术方案如下:
2、一方面,提供了一种基于高斯过程的多传感器布局方法,该方法由电子设备实现,该方法包括:
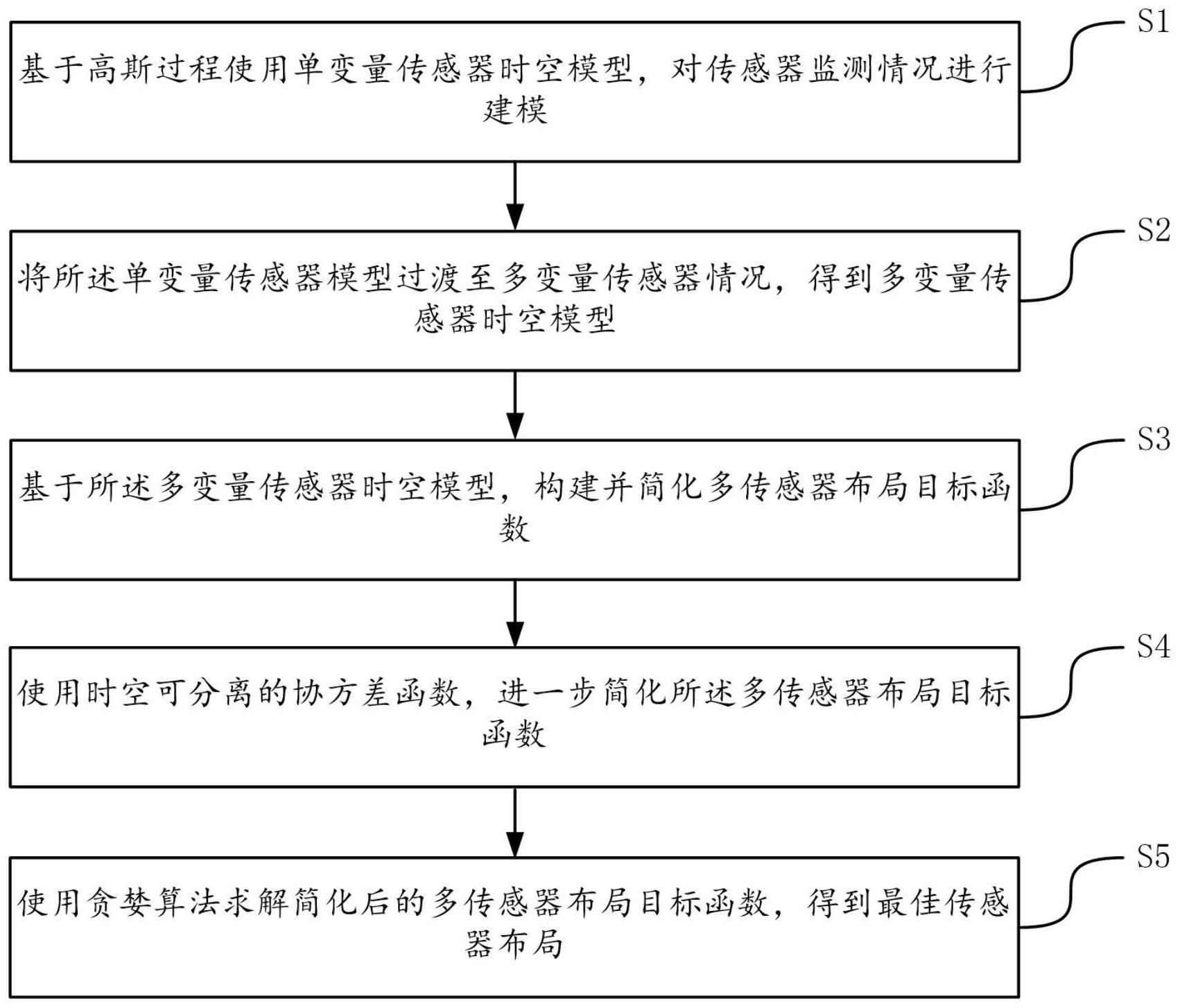
3、s1、基于高斯过程使用单变量传感器时空模型,对传感器监测情况进行建模;
4、s2、将所述单变量传感器模型过渡至多变量传感器情况,得到多变量传感器时空模型;
5、s3、基于所述多变量传感器时空模型,构建并简化多传感器布局目标函数;
6、s4、使用时空可分离的协方差函数,进一步简化所述多传感器布局目标函数;
7、s5、使用贪婪算法求解简化后的多传感器布局目标函数,得到最佳传感器布局。
8、可选地,所述s1,具体包括:
9、令g为目标区域所有传感器候选位置个数,n为已部署传感器的位置个数,n为未部署传感器的位置个数,g=n+n;假设有n个同类型的传感器位于位置传感器进行测量的时间定义为传感器在所有时刻收集的测量值为其中表示在时刻tu所有位置的测量值,表示在时刻tu和位置sp的测量值;
10、使用单变量传感器时空模型来对传感器监测情况进行建模:
11、yt,s=xt,sβ+wt,s+εt,s (1-1)
12、式(1-1)中:yt,s为传感器的测量值;xt,s为参考协变量;β为协变量的系数;wt,s是由零均值高斯过程建模的潜在随机变量;εt,s为一个独立且均匀分布的噪声,其遵循具有零均值和方差τ2的正态分布。
13、可选地,所述s2,具体包括:
14、假设有k种不同类型的传感器监测k个不同的变量,并且每种类型的传感器都有n个,所有类型的传感器都嵌入在同一块板上,不同类型的传感器都位于同一位置s,所收集的测量值表示为:
15、yt,s=xt,sβ+wt,s+εt,s (1-2)
16、式(1-2)中:表示k个类型传感器在时间t和位置s处的测量值,其中为第i个类型传感器的测量值,yt,s服从多元高斯分布mgd,yt,s~mgd(μ,σ),μ=e(yt,s)为均值,σ为多元协方差矩阵,表示为:
17、
18、
19、
20、协方差矩阵表示观测值在时间和空间上的相关性;其中表示第i个协变量对应的系数;协变量矩阵xt,s表示为:
21、
22、其中:表示第i个变量所对应的协变量值;
23、wt,s是一个过程向量,通过多变量高斯过程mvgp进行建模,wt,s~mvgp(0,ψ),其均值为0,协方差矩阵ψ表示为:
24、
25、式(1-7)中:i为单位矩阵;表示第i个变量的方差;εt,s~n(0,τ2)是由高斯白噪声所定义的测量误差。
26、可选地,所述s3,具体包括:
27、设分别表示空间和时间中未监测的,需要利用已有传感器监测数据进行预测的位置和时刻,一般情况下,需进行预测的位置数量远大于已观测的位置数量,n>>n,设表示所需预测时间和位置的潜在随机过程,其与观测值yt,s具有联合分布,由于yt,s服从多元高斯分布,由多元高斯边缘分布得到:
28、
29、式(1-8)中:μ和σ分别为yt,s的均值和协方差矩阵;μz和分别为的均值向量和协方差矩阵;为表示yt,s和之间相关性的互协方差矩阵,根据式(1-8),在给定观测值yt,s的条件下,推出的条件分布,如式(1-9)所示:
30、
31、其中:
32、
33、
34、传感器布局优化的关键在于能够最大程度的减少未监测位置处的预测误差,由式(1-9)可以推出,在给定观测值yt,s的条件下,未观测位置时间(tm,sn)处的预测不确定性与协方差矩阵有关,式(1-11)表明,协方差矩阵的对角线元素表示预测方差值,因此,传感器布局优化问题转化为最小化协方差矩阵的对角线元素值问题;
35、设g为一个包含了传感器所有可能放置位置的集合,g的基数为g,c为g的子集,c的基数为n,传感器布局优化的目标是在g中找到子集c,当传感器位于c中的位置时能够最多的减少未观测位置处的预测误差,因此传感器布局优化的目标函数表示为:
36、
37、其中:copt是传感器最佳布局位置的集合,式(1-11)中,由于是未观测时空位置(tm,sn)处的协方差矩阵,因此其不依赖于c,同时由于前为负号,因此将式(1-12)简化为:
38、
39、因为tr(ab)=tr(ba),式(1-13)简化为:
40、
41、可选地,所述s4,具体包括:
42、如果数据之间的相关性在空间和时间上是可分离的,则其协方差矩阵σ表示为:
43、
44、其中:σ(s)是一个只包含空间协方差值的纯空间协方差矩阵;σ(t)是一个只包含时间协方差值的纯时间协方差矩阵;
45、因为时空协方差函数是可分离的,因此互协方差矩阵σyz改写为:
46、
47、其中:和分别表示yt,s和之间的纯空间和纯时间互协方差矩阵,根据克罗内克积将式(1-14)中迹的表达式进行改写:
48、
49、因此得到:
50、
51、因为是纯时间协方差矩阵,当传感器的位置在空间上变化时,不会改变,因此,传感器布局优化问题仅取决于空间变化,与时间变化无关,由此进一步将传感器布局优化问题的目标函数改写为:
52、
53、可选地,所述s5,具体包括:
54、定义传感器布局优化问题的近似最优子集为假设初始条件下最优子集为空集,
55、从传感器侯选位置集合g中随机选择一个位置si,i=1,...,g,将每一个位置si,i=1,...,g代入公式(1-19)中的均可得到返回值,所有返回值中的最大值所对应的位置si为第一个候选最佳传感器位置,记为s1,此时最优子集
56、将所选位置s1从g中去除,重新从最新集合g中选择一个位置si,i=1,...,g-1,将其临时添加到最优子集此时将每一个位置si,i=1,...,g-1代入公式(1-19)中的均可得到返回值,所有返回值中的最大值所对应的位置si为第二个候选最佳传感器位置,记为s2,此时最优子集
57、算法迭代运行,每次迭代中,所获得的新的候选最佳传感器位置被添加到中,直到的基数为n,得到最佳传感器位置集合
58、另一方面,提供了一种基于高斯过程的多传感器布局装置,所述装置包括:
59、第一建模模块,用于基于高斯过程使用单变量传感器时空模型,对传感器监测情况进行建模;
60、第二建模模块,用于将所述单变量传感器模型过渡至多变量传感器情况,得到多变量传感器时空模型;
61、构建模块,用于基于所述多变量传感器时空模型,构建并简化多传感器布局目标函数;
62、简化模块,用于使用时空可分离的协方差函数,进一步简化所述多传感器布局目标函数;
63、求解模块,用于使用贪婪算法求解简化后的多传感器布局目标函数,得到最佳传感器布局。
64、另一方面,提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现上述基于高斯过程的多传感器布局方法。
65、另一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述基于高斯过程的多传感器布局方法。
66、本发明提供的技术方案带来的有益效果至少包括:
67、本发明能够有效的进行多传感器布局优化,对未监测位置的预测效果最好,所需传感器数量较少且得出布局结果所需计算时间显著降低。
- 还没有人留言评论。精彩留言会获得点赞!