无人机的识别方法、装置及存储介质与流程
本发明属于图像识别,具体涉及一种无人机的识别方法、装置及存储介质。
背景技术:
1、无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
2、由于无人机具有体积小、造价低、使用方便等优点常被用于军事对抗,而不同类型的无人机其功能也存在一定差异,因此在军事对抗过程中,对对方无人机类型的识别也显得十分有必要。而由于无人机的体积和外界天气因素的影响,所获取到的无人机图像往往并不清晰,从而导致常常无法准确识别出图像中无人机的型号。
3、因此,如何提供一种有效的方案以便准确识别出无人机的型号,已成为现有技术中一亟待解决的难题。
技术实现思路
1、本发明的目的是提供一种无人机的识别方法、装置及存储介质,用以解决现有技术中存在的上述问题。
2、为了实现上述目的,本发明采用以下技术方案:
3、第一方面,本发明提供了一种无人机的识别方法,包括:
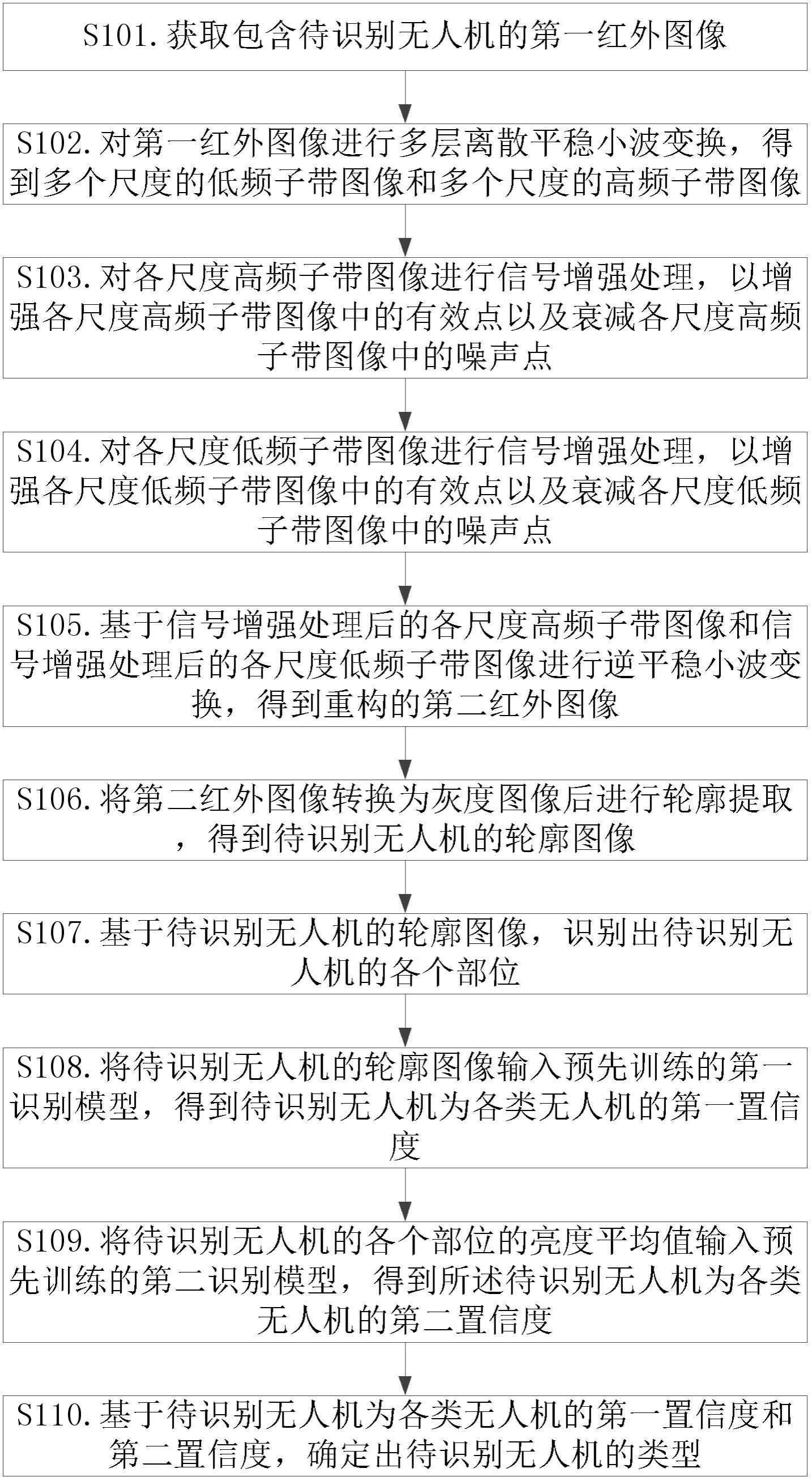
4、获取包含待识别无人机的第一红外图像;
5、对所述第一红外图像进行多层离散平稳小波变换,得到多个尺度的低频子带图像和多个尺度的高频子带图像;
6、对各尺度高频子带图像进行信号增强处理,以增强各尺度高频子带图像中的有效点以及衰减各尺度高频子带图像中的噪声点;
7、对各尺度低频子带图像进行信号增强处理,以增强各尺度低频子带图像中的有效点以及衰减各尺度低频子带图像中的噪声点;
8、基于信号增强处理后的各尺度高频子带图像和信号增强处理后的各尺度低频子带图像进行逆平稳小波变换,得到重构的第二红外图像;
9、将所述第二红外图像转换为灰度图像后进行轮廓提取,得到所述待识别无人机的轮廓图像;
10、基于所述待识别无人机的轮廓图像,识别出所述待识别无人机的各个部位;
11、将所述待识别无人机的轮廓图像输入预先训练的第一识别模型,得到所述待识别无人机为各类无人机的第一置信度;
12、将所述待识别无人机的各个部位的亮度平均值输入预先训练的第二识别模型,得到所述待识别无人机为各类无人机的第二置信度;
13、基于所述待识别无人机为各类无人机的第一置信度和第二置信度,确定出所述待识别无人机的类型。
14、基于上述公开的内容,本发明通过获取包含待识别无人机的第一红外图像;对第一红外图像进行多层离散平稳小波变换,得到多个尺度的低频子带图像和多个尺度的高频子带图像;对各尺度高频子带图像进行信号增强处理,以增强各尺度高频子带图像中的有效点以及衰减各尺度高频子带图像中的噪声点;对各尺度低频子带图像进行信号增强处理,以增强各尺度低频子带图像中的有效点以及衰减各尺度低频子带图像中的噪声点;基于信号增强处理后的各尺度高频子带图像和信号增强处理后的各尺度低频子带图像进行逆平稳小波变换,得到重构的第二红外图像。如此,可通过多层离散平稳小波变换实现对红外图像中的目标增强以及对红外图像中的噪点进行衰减,使得在红外图像中能够更清晰的显示无人机轮廓。然后将第二红外图像转换为灰度图像后进行轮廓提取,得到待识别无人机的轮廓图像;基于待识别无人机的轮廓图像,识别出待识别无人机的各个部位;将待识别无人机的轮廓图像输入预先训练的第一识别模型,得到待识别无人机为各类无人机的第一置信度;将待识别无人机的各个部位的亮度平均值输入预先训练的第二识别模型,得到待识别无人机为各类无人机的第二置信度;基于待识别无人机为各类无人机的第一置信度和第二置信度,确定出待识别无人机的类型。如此,可结合无人机的轮廓及无人机飞行过程中各部位的红外辐射亮度准确识别出无人机的类型。
15、通过上述的设计,本发明可先通过多层离散平稳小波变换实现对红外图像中的目标增强以及对红外图像中的噪点进行衰减,使得在红外图像中能够更清晰的显示无人机轮廓,在此基础上结合无人机的轮廓及无人机飞行过程中各部位的红外辐射亮度准确识别出无人机的类型,如此可准确的识别出无人机的机型,进而识别出对我方无人机,便于实际应用和推广。
16、在一个可能的设计中,所述对各尺度高频子带图像进行信号增强处理,以增强各尺度高频子带图像中的有效点以及衰减各尺度高频子带图像中的噪声点,包括:
17、确定出用于信号与噪声分割的第一分割阈值;
18、基于所述第一分割阈值对所述各尺度高频子带图像中的高频小波系数进行分割,以识别出各尺度高频子带图像中有效点和噪声点;
19、采用不同的增强系数对各尺度高频子带图像中的每个像素点的高频小波系数幅值进行增强处理。
20、在一个可能的设计中,采用如下公式对各尺度高频子带图像中的每个像素点的高频小波系数幅值进行增强处理:
21、
22、其中,t为第一分割阈值,和分别为增强系数且>1,0<<1,为第k个方向中第j个尺度的高频子带图像中像素坐标为(x,y)的像素点在增强处理前的高频小波系数幅值,为第k个方向中第j个尺度的高频子带图像中像素坐标为(x,y)的像素点在增强处理后的高频小波系数幅值。
23、在一个可能的设计中,所述对各尺度低频子带图像进行信号增强处理,以增强各尺度低频子带图像中的有效点以及衰减各尺度低频子带图像中的噪声点,包括:
24、计算各尺度低频子带图像中像素点的低频小波系数幅值的平均值;
25、基于各尺度低频子带图像中像素点的低频小波系数幅值的平均值识别出各尺度低频子带图像中的背景区域和目标区域;
26、将各尺度低频子带图像中的背景区域所对应低频小波系数幅值的平均值,作为对应尺度低频子带图像所对应的第二分割阈值;
27、基于各尺度低频子带图像所对应的第二分割阈值,对各尺度低频子带图像中的低频小波系数进行分割,以识别出各尺度低频子带图像中有效点和噪声点;
28、基于各尺度低频子带图像中所有低频小波系数幅值的绝对值,确定出各尺度低频子带图像所对应的增强系数;
29、基于各尺度低频子带图像所对应的增强系数对各尺度低频子带图像中每个像素点的低频小波系数幅值进行增强处理。
30、在一个可能的设计中,所述基于各尺度低频子带图像中像素点的低频小波系数幅值的平均值识别出各尺度低频子带图像中的背景区域和目标区域,包括:
31、将各尺度低频子带图像进行网格划分;
32、针对任一尺度的低频子带图像,计算各网格中像素点的低频小波系数幅值的平均值;
33、若某一网格中像素点的低频小波系数幅值的平均值,低于对应尺度低频子带图像中像素点的低频小波系数幅值的平均值,则判定所述某一网格所在区域为背景区域;
34、否则,判断所述某一网格所在区域为目标区域。
35、在一个可能的设计中,采用如下公式对各尺度低频子带图像中每个像素点的低频小波系数幅值进行增强处理:
36、
37、其中,sign()为符号函数,为第j个尺度的低频子带图像中像素坐标为(x,y)的像素点在增强处理前的低频小波系数幅值,为第j个尺度的低频子带图像中像素坐标为(x,y)的像素点在增强处理后的低频小波系数幅值,为第j个尺度的低频子带图像所对应的第二分割阈值,k为指数因子,,。
38、在一个可能的设计中,所述第一识别模型和所述第二识别模型均为卷积神经网络模型。
39、第二方面,本发明提供了一种无人机的识别装置,包括获取单元、变换单元、处理单元、提取单元、识别单元、运算单元和确定单元;
40、获取单元用于获取包含待识别无人机的第一红外图像;
41、变换单元用于对所述第一红外图像进行多层离散平稳小波变换,得到多个尺度的低频子带图像和多个尺度的高频子带图像;
42、处理单元用于对各尺度高频子带图像进行信号增强处理,以增强各尺度高频子带图像中的有效点以及衰减各尺度高频子带图像中的噪声点;
43、处理单元还用于对各尺度低频子带图像进行信号增强处理,以增强各尺度低频子带图像中的有效点以及衰减各尺度低频子带图像中的噪声点;
44、变换单元还用于基于信号增强处理后的各尺度高频子带图像和信号增强处理后的各尺度低频子带图像进行逆平稳小波变换,得到重构的第二红外图像;
45、提取单元用于将所述第二红外图像转换为灰度图像后进行轮廓提取,得到所述待识别无人机的轮廓图像;
46、识别单元用于基于所述待识别无人机的轮廓图像,识别出所述待识别无人机的各个部位;
47、运算单元用于将所述待识别无人机的轮廓图像输入预先训练的第一识别模型,得到所述待识别无人机为各类无人机的第一置信度;
48、运算单元还用于将所述待识别无人机的各个部位的亮度平均值输入预先训练的第二识别模型,得到所述待识别无人机为各类无人机的第二置信度;
49、确定单元用于基于所述待识别无人机为各类无人机的第一置信度和第二置信度,确定出所述待识别无人机的类型。
50、第三方面,本发明提供了一种无人机的识别装置,包括依次通信相连的存储器、处理器和收发器,其中,所述存储器用于存储计算机程序,所述收发器用于收发消息,所述处理器用于读取所述计算机程序,执行如上述第一方面所述的无人机的识别方法。
51、第四方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,执行第一方面所述的无人机的识别方法。
52、第五方面,本发明提供了一种包含指令的计算机程序产品,当所述指令在计算机上运行时,使所述计算机执行如第一方面所述的无人机的识别方法。
53、有益效果:
54、本发明提供的无人机的识别方法、装置及存储介质,可先通过多层离散平稳小波变换实现对红外图像中的目标增强以及对红外图像中的噪点进行衰减,使得在红外图像中能够更清晰的显示无人机轮廓,在此基础上结合无人机的轮廓及无人机飞行过程中各部位的红外辐射亮度准确识别出无人机的类型,如此可准确的识别出无人机的机型,进而识别出对我方无人机,便于实际应用和推广。
- 还没有人留言评论。精彩留言会获得点赞!