量子神经网络的漏洞检测方法及自动驾驶漏洞检测方法
本发明属于量子,具体涉及量子神经网络的漏洞检测方法及自动驾驶漏洞检测方法。
背景技术:
1、量子神经网络模型是一种针对近期有噪中规量子计算设备提出的混合量子-经典机器学习模型,通过优化参数向量上的损失函数使其减少至收敛来解决一些特定的有监督和无监督学习任务,包括分类和回归、生成建模任务;随着量子计算机的发展,量子神经网络模型在学习能力和资源消耗上的潜在量子优势具有广阔的释放空间。
2、量子神经网络模型在量子技术领域中发挥着重要的作用,因此在实际应用中,对于量子神经网络模型的可靠性提出要求,针对量子神经网络模型进行漏洞检测,对于提高模型的可靠性具有十分的必要性。
3、目前,尚不存在一种针对量子神经网络模型的漏洞检测方法。
4、当下的自动驾驶领域中所采用的经典机器学习技术在进行模型训练时,往往需要大量的数据样本支持,同时也面临巨大的训练开销,将量子神经网络模型应用到自动驾驶系统中,能够通过其并行性与相干性有效地解决机器学习模型训练时资源开销大、学习效率低下的问题,提升自动驾驶的性能;但是,使用了量子神经网络模型的自动驾驶系统仍存在可靠性无法完全满足所需要求的问题,系统仍容易受到影响因素的干扰,进而使得系统整体的准确性下降。
5、综上所述,目前大部分的量子神经网络模型仍需解决可靠性不足的问题,同时使用量子神经网络用于自动驾驶系统中,也给自动驾驶系统带来了影响。
技术实现思路
1、本发明的目的之一在于提供一种可靠性提升、准确度增加的量子神经网络的漏洞检测方法。
2、本发明的目的之二在于提供一种可靠性增强、稳健性提升的自动驾驶漏洞检测方法。
3、本发明提供的这种量子神经网络的漏洞检测方法,包括如下步骤:
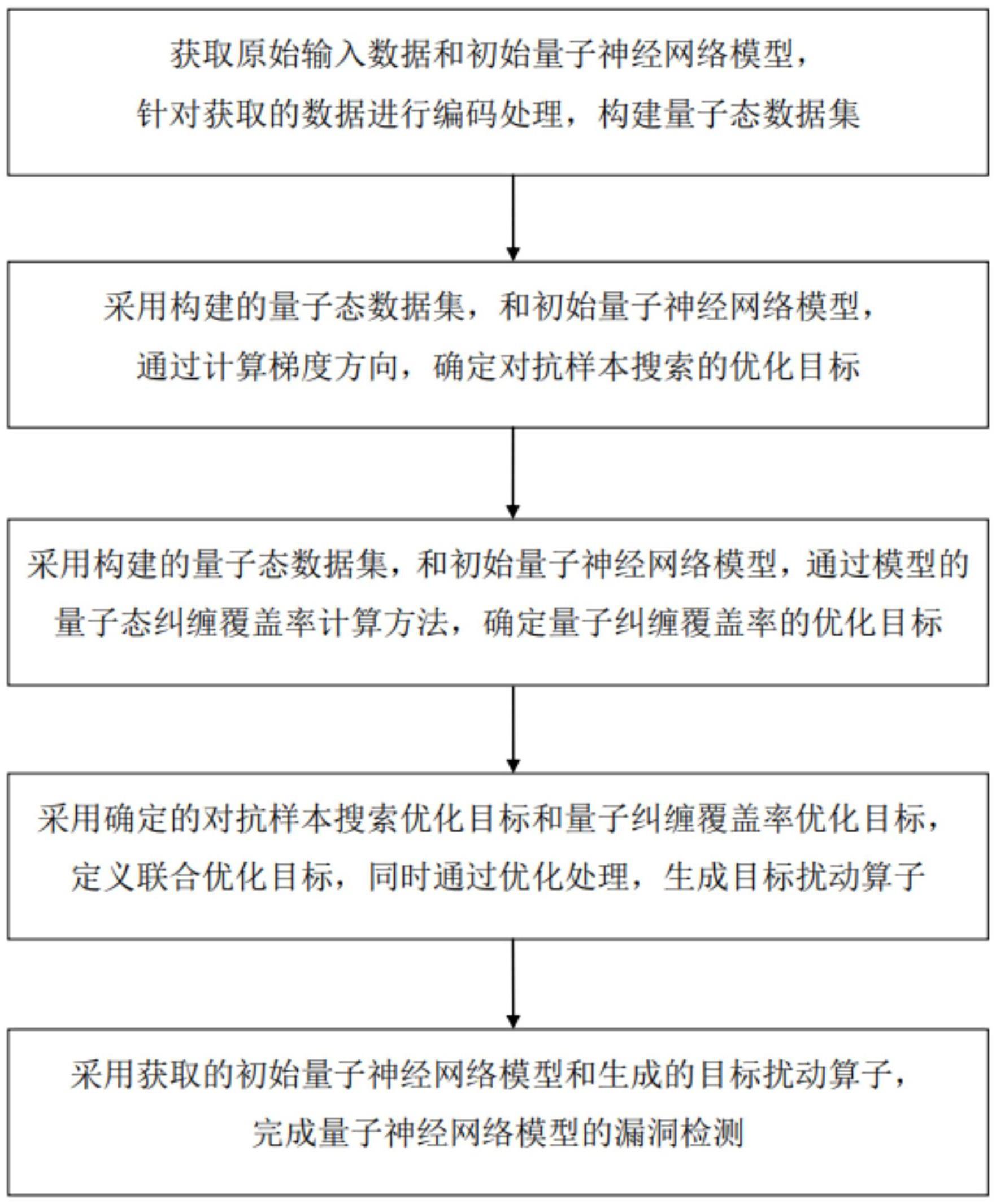
4、s1.获取原始输入数据和初始量子神经网络模型,针对获取的数据进行编码处理,构建量子态数据集;
5、s2.采用步骤s1构建的量子态数据集,和初始量子神经网络模型,通过计算梯度方向,确定对抗样本搜索的优化目标;
6、s3.采用步骤s1构建的量子态数据集,和初始量子神经网络模型,通过模型的量子态纠缠覆盖率计算方法,确定量子纠缠覆盖率的优化目标;
7、s4.采用步骤s2确定的对抗样本搜索优化目标和步骤s3确定的量子纠缠覆盖率优化目标,定义联合优化目标,同时通过优化处理,生成目标扰动算子;
8、s5.采用步骤s1获取的初始量子神经网络模型和步骤s4生成的目标扰动算子,完成量子神经网络模型的漏洞检测。
9、步骤s1所述的获取原始输入数据和初始量子神经网络模型,针对获取的数据进行编码处理,构建量子态数据集,具体包括:
10、初始量子神经网络模型为训练完备的待测试神经网络,具体包括:
11、“训练完备”表示为:待测试的量子神经网络模型通过训练数据的学习,在测试数据中表现为各项学习指标均收敛于设定的范围,基于训练结果固定模型参数;
12、量子神经网络拟设表现为一种由编码线路和变分线路两部分组成的参数化量子线路,具体包括:
13、变分线路由一组含参旋转门和固定门以特定模型排列的方式组成,其中,含参旋转门用于遍历希尔伯特空间中存在的酉变换,固定门为提供相干性的受控门;
14、编码线路的结构通过选择将环境图像数据编码为量子态的态制备方案确定;基于数据集的维度、计算资源的关系确定态制备方案;
15、选择角度编码作为态制备方案;编码线路由若干含参旋转门排列组成,其中旋转门的参数由图像数据的信息决定;
16、整个量子神经网络拟设的宽度依赖于编码输入数据集所需的量子比特数,输入数据的维度越高,线路的规模越大;
17、步骤s2所述的采用步骤s1构建的量子态数据集,和初始量子神经网络模型,通过计算梯度方向,确定对抗样本搜索的优化目标,具体包括:
18、(2-1)通过测量操作针对量子系统进行观测投影处理,获取预测标签;
19、(2-2)获取模型中输入量子态与步骤(2-1)获取的预测标签之间的梯度与各个分类结果的梯度方向;
20、(2-3)选择通过观测处理得到的观测概率最高、且不同于原预测类别的前n个类别对应的梯度方向,通过将前n个类别的梯度方向累加并与原预测类别方向相减的方式取得预测差的张量表达式,确定对抗样本搜索的优化目标,采用下述公式表示对抗样本搜索的优化目标:
21、
22、其中,yi为预测概率最高且不同于原预测类别的前n个标签类别,y为测试输入的原始标签;
23、(2-4)针对预测标签进行损失函数的计算:
24、采用下述公式表示损失函数的计算过程:
25、
26、其中,<x|k表示量子态数据集中第k个数据;yk表示量子态数据集中第k个数据对应的标签;e表示单位矩阵;
27、通过梯度上升算法提升原类别标签与量子神经网络模型的损失函数值,通过梯度下降算法减少其他类别标签的损失值,进而实现差异行为的最大化处理;
28、步骤s3所述的采用步骤s1构建的量子态数据集,和初始量子神经网络模型,通过模型的量子态纠缠覆盖率计算方法,确定量子纠缠覆盖率的优化目标,具体包括:
29、选择一种多粒子纠缠的多项式全局度量方法,计算量子神经网络模型的量子纠缠覆盖率,将多项式全局度量记作纠缠度量q;
30、采用下述公式表示作用于计算基上的线性映射过程:
31、
32、其中,j=1,…,n;表示第个量子比特缺失;δ表示克罗内克符号;
33、采用下述公式计算对于量子态|ψ>的纠缠度量q:
34、
35、其中,0≤q≤1,q的值越大,对应的纠缠程度越高;d表示广义距离,对于给定的量子态|u>和|v>,对应的广义距离d的计算公式如下所示:
36、
37、|u>=∑ui|i>
38、|v>=σvi|i>
39、计算输入量子神经网络前的量子态纠缠度量与输入量子神经网络后的量子态纠缠度量的差值,同时以增大差值为目标求解对于量子纠缠覆盖率的梯度方向,进而确定量子纠缠覆盖率的优化目标,采用下述公式表示优化目标:
40、
41、其中,表示从量子神经网络中输出的量子态的纠缠度;q(|x>)表示从量子神经网络中输入的量子态的纠缠度;
42、步骤s4所述的采用步骤s2确定的对抗样本搜索优化目标和步骤s3确定的量子纠缠覆盖率优化目标,定义联合优化目标,同时通过优化处理,生成目标扰动算子,具体包括:
43、采用步骤s2确定的对抗样本搜索优化目标和步骤s3确定的量子纠缠覆盖率优化目标,采用下述公式定义用于变异的梯度搜索联合优化目标:
44、obj=λ1×obja+λ2×obje
45、其中,obj表示梯度搜索联合优化目标;obja表示对抗样本搜索部分的优化目标,λ1表示控制权重的超参数;obje表示量子纠缠覆盖率部分的优化目标;λ2表示平衡两个部分的优化目标权重的超参数;
46、通过梯度上升算法搜索扰动算子up,不断变异原测试输入|x>,直到迭代结束,对优化目标完成最大化处理;
47、步骤s5所述的采用步骤s1获取的初始量子神经网络模型和步骤s4生成的目标扰动算子,完成量子神经网络模型的漏洞检测,具体包括:
48、将步骤s4生成的目标扰动算子up作用于原输入|x>上得到变异输入|x′>,将|x′>重新输入到步骤s1获取的初始量子神经网络模型中,如果输出的预测结果与原输入|x>的预测结果不一致,说明生成了对于原输入|x>的对抗测试输入;如果输出的预测结果与原输入|x>的预测结果相同,将输出的预测结果中能够提升量子纠缠覆盖率并且扰动大小符合预设要求的变异输入存储到种子队列中继续进行变异;通过判断是否生成对抗测试输入完成量子神经网络模型的漏洞检测,如果生成对抗测试输入,表示模型存在漏洞;
49、本发明还提供一种自动驾驶漏洞检测方法,包括如下步骤:
50、a1.获取自动驾驶系统在行驶场景下的环境图像数据、自动驾驶系统适用的初始量子神经网络模型;
51、a2.采用步骤a1获取的图像数据、初始模型,通过量子神经网络的漏洞检测方法进行初始模型的漏洞检测;
52、a3.采用步骤a2检测后得到的结果完成自动驾驶系统的漏洞检测。
53、本发明提供的这种量子神经网络的漏洞检测方法,通过对初始量子神经网络模型进行训练、并优化处理,确定目标扰动算子,进而完成模型的漏洞检测;本发明提供的自动驾驶漏洞检测方法,通过将量子神经网络的漏洞检测方法应用于自动驾驶系统中,完成针对自动驾驶系统的漏洞检测;本发明提出的量子神经网络的漏洞检测方法可靠性高、准确度强;本发明提出的自动驾驶的漏洞检测方法也提升了自动驾驶系统的可靠性和稳健性。
- 还没有人留言评论。精彩留言会获得点赞!