用于预测目标对象的运动轨迹的方法、计算设备和系统与流程
本申请涉及轨迹预测。
背景技术:
1、在智能驾驶和辅助驾驶中常使用轨迹预测。
2、一种轨迹预测方案是基于物理模型的预测方案,其通过物理、数学模型(例如,牛顿运动定律和已知车辆动力学参数)来预测车辆的运动轨迹。该方案需要对车辆的物理特性和环境因素进行建模。只要获得的数据准确,该方案就能够产生可靠的预测结果。然而,该方案仅能对自车进行预测,而无法准确预测其他车辆的运动轨迹。
3、另一种轨迹预测方案是基于机器学习的预测方案,其利用神经网络和大量训练数据进行建模,随后使用这些模型来预测未来轨迹。该方案预测结果准确,不仅可对自车进行预测,而且还能够对其他车辆进行预测。然而,该方案中产生的模型参数量大,对于目前的嵌入式计算环境而言模型的运算是一个挑战。
4、本领域中需要一种兼顾轨迹预测的预测准确性和计算资源消耗的方案。
技术实现思路
1、为了提供一种兼顾轨迹预测的准确性和计算资源消耗的方案,提供本发明。
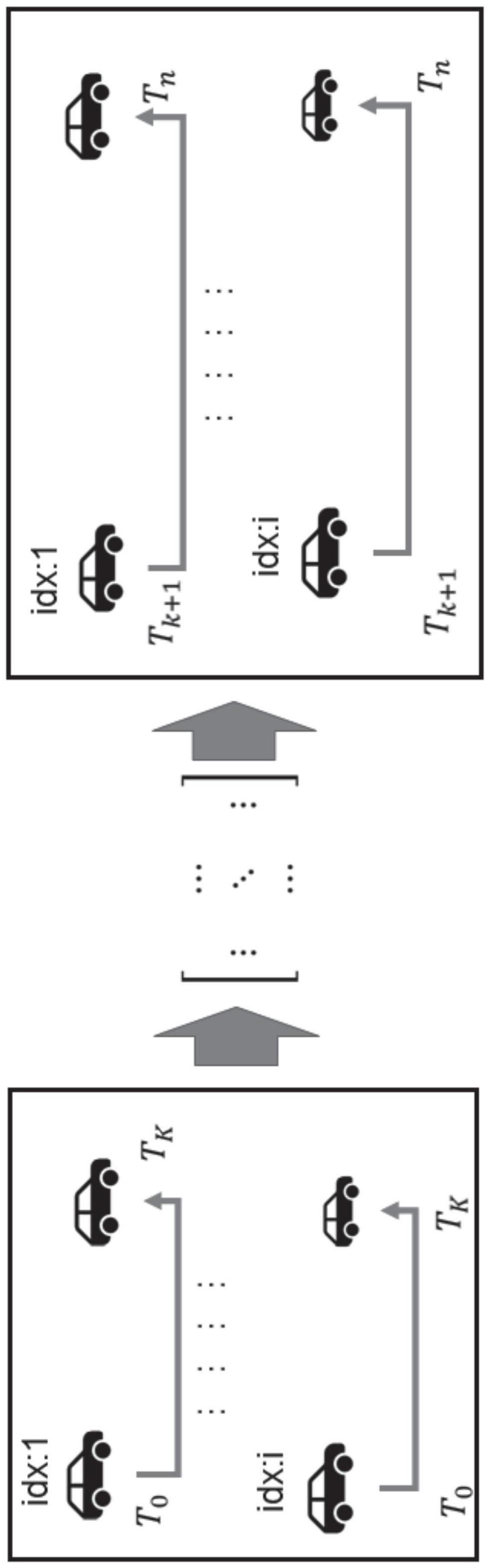
2、根据本发明的一个方面,提供一种用于预测目标对象的运动轨迹的方法,其包括:由交通工具的计算设备采集多个目标对象在预定时间段内的位姿数据,多个目标对象与交通工具在未来时间段内的交通活动有关;以及由计算设备基于位姿数据来预测多个目标对象在未来时间段内的运动轨迹,其中,预测多个目标对象在未来时间段内的运动轨迹包括:根据贝叶斯法则,基于每个目标对象的位姿数据来计算每个目标对象在未来时间段内的未来时刻出现在指定位置时的最大似然估计,作为每个交通工具的状态变量;以及基于状态变量确定运动轨迹。
3、根据本发明的另一方面,提供一种计算机可读存储介质,其上存储有计算机可执行指令,该计算机可执行指令当被执行时用于执行上述方法。
4、根据本发明的另一方面,提供一种计算机程序产品,被有形地存储在计算机可读存储介质上,并且包括计算机可执行指令,该计算机可执行指令当被执行时用于执行上述方法。
5、根据本发明的另一方面,提供一种用于交通工具的计算设备,其包括处理器和存储器,该存储器存储计算机可执行指令,盖计算机可执行指令当被执行时使处理器执行上述方法。
6、根据本发明的另一方面,提供一种用于交通工具的系统,其包括传感器和上述计算设备,传感器用于感测交通工具的环境数据。
7、根据本发明的实施例的方法、计算设备和系统能够在不过多地消耗计算资源的情况下获得可接受的运动轨迹的预测准确性。
技术特征:
1.一种用于预测目标对象的运动轨迹的方法,包括:
2.如权利要求1所述的方法,其特征在于,计算每个目标对象在所述未来时间段内的未来时刻出现在指定位置时的最大似然估计包括:
3.如权利要求2所述的方法,其特征在于,使用关于所述状态变量的高斯型分布密度函数包括:
4.如权利要求3所述的方法,其特征在于,执行最小二乘计算包括:
5.如权利要求3所述的方法,其特征在于,执行最小二乘计算包括:
6.如权利要求5所述的方法,其特征在于,所述函数为:其中,e是自然对数的底,a、b、c、d是参数,x是状态变量。
7.如权利要求1所述的方法,其特征在于,还包括:
8.如权利要求1所述的方法,其特征在于,还包括:
9.如权利要求1所述的方法,其特征在于,还包括:
10.如权利要求1所述的方法,其特征在于,所述位姿数据从所述交通工具的传感器感测的环境数据中采集。
11.一种计算机可读存储介质,其上存储有计算机可执行指令,所述计算机可执行指令当被执行时用于执行如权利要求1-10中的任一项所述的方法。
12.一种计算机程序产品,被有形地存储在计算机可读存储介质上,并且包括计算机可执行指令,所述计算机可执行指令当被执行时用于执行如权利要求1-10中的任一项所述的方法。
13.一种用于交通工具的计算设备,包括:
14.如权利要求13所述的计算设备,其特征在于,所述处理器还用于:
15.如权利要求13所述的计算设备,其特征在于,所述计算设备是嵌入式计算设备。
16.一种用于交通工具的系统,包括:
17.如权利要求16所述的系统,其特征在于,所述传感器包括前置摄像头和/或前置雷达。
技术总结
本申请公开了用于预测目标对象的运动轨迹的方法、计算设备和系统。一种用于预测目标对象的运动轨迹的方法,包括:由交通工具的计算设备采集多个目标对象在预定时间段内的位姿数据,该多个目标对象与交通工具在未来时间段内的交通活动有关;以及由计算设备基于位姿数据来预测多个目标对象在未来时间段内的运动轨迹,其中,预测多个目标对象在未来时间段内的运动轨迹包括:根据贝叶斯法则,基于每个目标对象的位姿数据来计算每个目标对象在未来时间段内的未来时刻出现在指定位置时的最大似然估计,作为每个交通工具的状态变量;以及基于状态变量确定运动轨迹。
技术研发人员:沈蔚桦,张冬鹏
受保护的技术使用者:安波福电子(苏州)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!