一种用于大间距、无公共视场的相机外参标定装置及方法与流程
本发明涉及相机标定领域,具体涉及一种用于大间距、无公共视场的相机外参标定装置及方法。
背景技术:
1、目前,视觉检测已经被广泛应用于智能加工制造领域,由于单个相机的视场有限,在对大型工件测量时(如高铁列车、汽车、轮船、飞机等),需要增加多个相机以扩充视场。当存在多个相机时,需要标定相机之间的外参,并且相机外参的标定结果会直接影响视觉检测结果的精度。
2、现有的相机外参标定方法通常是在相机的公共视场内寻找或设置标志点,通过图像中相同标记点作为约束,获得两部相机之间的旋转平移矩阵。然而,当相机之间无公共视场时,该方法会失效。针对这一问题,现有方案需要增加额外的辅助设备:
3、如专利文献cn114373019a公开了一种利用最优化方法对无公共视场相机进行标定的方法,增加了与左右两相机均具有公共视场的第三个相机k作为中介,求取公共视场i、公共视场ⅱ范围内各标志点在相机k坐标系中的三维坐标,当待标定相机镜头朝向几乎背离时,例如:轮对检测系统,如图1所示,相机一、相机二分别安装在左右两侧轨道内侧,镜头朝向轨道外侧,其光轴夹角大于150°,并且两部相机之间的间距超过50cm,此时,第三个相机的安放位置会非常远,这样会为标记点的选择增加困难,标定精度也会下降。
4、又如罗明在论文《多传感器机器视觉测量系统的研究与应用》中引入了双经纬仪建立空间三维坐标测量系统,直接测量光平面上控制点的三维坐标,实现多相机视觉测量系统的全局标定;专利文献cn112308926a中引入了摄影测量系统辅助测量编码点空间坐标,进而求取无公共视场相机之间的外参。此类方法,需要引入高精度测量设备,造价高,并且,当相机安装在户外,如轮对检测传感器的相机一、相机二分别安装在左右两侧列车轨道内侧,此时,标定场地为户外,标定场地受限、环境差,并不适合引入大型的辅助标定设备。
技术实现思路
1、为了解决上述技术问题,本发明提供用于大间距、无公共视场的相机外参标定装置及方法,通过相机外参标定装置实现靶标或者平面板在标定空间中可移动,能够在不同相机视场中的成像,无需引入大型辅助设备,也能得出无公共视场相机之间的外参矩阵,本发明技术方案能够适配镜头几乎背离的、大间距的相机之间外参标定,并且降低了对标定环境的要求,具有设计简单,易于搭建,成本低、标定效率高的特点。
2、为此,本发明的技术方案如下:
3、一种用于大间距、无公共视场的相机外参标定装置,所述相机有两部,位置固定,间距至少为50cm,镜头朝向相反,光轴之间的夹角为120°~180°;
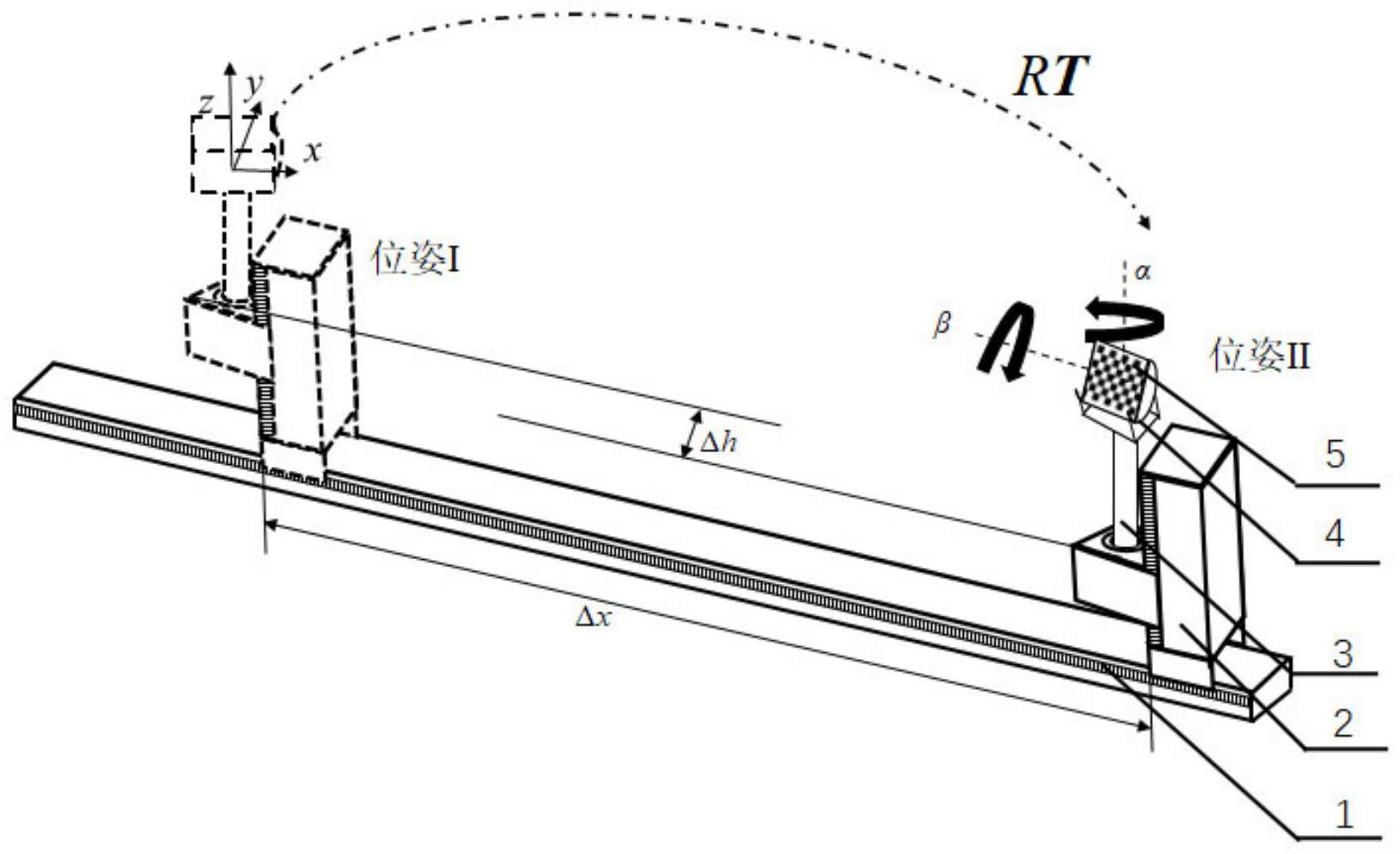
4、所述相机外参标定装置包括平移轨道和安装在平移轨道上的调节座,所述调节座能够在平移轨道上滑动,其包括具有连接关系的升降杆、旋转座和俯仰台;所述调节座用于固定安装靶标或平面板;
5、所述平移轨道、升降杆、旋转座和俯仰台分别用于调节靶标或平面板的水平位置、垂直位置、旋转角度以及俯仰角度,且能够分别记录旋转、平移以及俯仰角度的位姿变化量。
6、本发明还公开一种利用相机外参标定装置对大间距、无公共视场的相机进行标定的方法,所述调节座上安装靶标,标定时,调节靶标位姿,使一部相机能清晰采集靶标图像,记此时调节座的位姿为位姿i,根据采集的靶标图像中的多个标志点在相机坐标系下、靶标坐标系下的坐标,解算该相机与当前靶标坐标系之间的旋转平移关系;
7、移动调节座,调节靶标位姿,使另一部相机能够清晰成像,记此时调节座的位姿为位姿ii,根据相机采集到的靶标图像中的多个标志点在相机坐标系、靶标坐标系下的坐标,解算该相机与当前靶标坐标系之间的旋转平移关系;
8、基于相机外参标定装置所记载的从位姿i到位姿ii的位姿变化量,获取两部相机之间的旋转平移关系,记为外参矩阵。
9、进一步,所述标志点至少包括6个,其为棋盘格角点、同心圆或圆;
10、所述靶标坐标系原点设置于靶标几何中心处或者靶标角点处。
11、本发明还公开另一种利用相机外参标定装置对大间距、无公共视场的相机进行标定的方法,所述相机一侧均配套固定有多线激光器,预先标定相机与配套多线激光器的旋转平移关系;其特征在于:
12、所述调节座上安装平面板;预先建立全局坐标系,记平面板在初始位姿处在全局坐标系下的平面方程为初始平面方程;
13、所述标定的方法步骤如下:
14、s1、将平面板调至一部相机视场,多线激光器向平面板表面投射多线激光条,调节位姿,相机采集清晰的激光条图像;在激光条图像中选取不同激光条上的多个三维点拟合平面板在相机坐标系中的空间平面方程,记为平面方程a1;
15、记录调节座当前位姿相对于初始位姿产生的旋转、平移以及俯仰角度的位姿变化量,根据位姿变化量以及初始平面方程,求解当前位姿处平面板在全局坐标系中的空间平面方程,记为平面方程a2;
16、多次变换所述平面板的位姿,每次变换位姿,均获取一对平面方程a1和平面方程a2;
17、联立多对平面方程a1和平面方程a2,求取相机坐标系与全局坐标系之间的旋转平移关系;
18、s2、对另一部相机重复步骤s1,获得另一部相机坐标系与全局坐标系之间的旋转平移关系;
19、s3、以全局坐标系为媒介,获取两部相机之间的旋转平移关系,记为外参矩阵。
20、进一步,初始平面方程的计算方式包括以下两种:
21、方式一:在平面板上选取至少3个不共线的特征点,所述特征点其包括角点、棱边点和孔;根据平面板的加工尺寸,在初始位姿处获取多个特征点在全局坐标系下的三维坐标,利用得出的多个三维坐标拟合空间平面方程记为初始平面方程;
22、方式二:在初始位姿处,根据平面板的加工尺寸,获取平面板在全局坐标系下的法向量以及单个特征点在全局坐标系下的三维坐标,利用法向量以及特征点的三维坐标拟合空间平面方程记为初始平面方程。
23、进一步,求解当前位姿处平面板在全局坐标系中的空间平面方程,记为平面方程a2;方式如下:
24、记初始平面方程的方程系数为[ab c d];
25、则平面方程a2的方程系数[a’b’c’d’]=[a b c d]·[rt1]-1;
26、其中,rt1表示根据调节座当前位姿相对于初始位姿产生的旋转、平移以及俯仰角度的位姿变化量,得出的旋转平移关系,其由旋转角度调节变化量α、俯仰角度调节变化量β、沿水平方向平移的变化量δx和沿竖直方向平移的变化量δh组成。
27、优选,所述平面板为多边形平面板或者表面有孔的圆形平面板;
28、优选为正多边形平面板,如正方形平面板、正三角形平面板、正五边形;
29、所述平面板的表面为纯色无图案,其颜色与激光条的颜色灰度差大于100。
30、进一步,所述多线激光器至少投射两条激光条;
31、所述全局坐标系的原点设置在不发生位置改变的空间点。
32、进一步,步骤s1中,变换所述平面板的位姿至少三次,每次变换位姿,均获取一对平面方程a1和平面方程a2。
33、进一步,所述平移轨道固定安装在标定场地内;所述升降杆垂直安装在平移轨道上、能够在平移轨道上左右滑动;
34、所述旋转座安装在升降杆上、所述升降杆用于调节旋转座的高度;所述俯仰台安装在旋转座上,所述旋转座用于旋转俯仰台的安装角度;所述俯仰台用于安装靶标/平面板、调节靶标/平面板的俯仰角度;
35、或者,所述俯仰台安装在升降杆上、所述升降杆用于调节俯仰台的高度;所述旋转座安装在俯仰台上,所述俯仰台用于调节旋转座的俯仰角度;所述旋转座用于安装靶标/平面板、调节靶标/平面板的安装角度。
36、本发明具有以下有益效果:
37、①无需引入造价昂贵的大型辅助设备,降低了设备成本;
38、通过相机外参标定装置实现了靶标或者平面板在标定空间中可移动,能够在不同相机视场中的成像,并且通过获知不同位姿下的转换关系,得出无公共视场相机之间的外参矩阵。
39、②降低了对标定环境的要求,能够在户外进行,相机外参标定装置设计简单,易于搭建,标定效率高。
40、③能够胜任相机镜头几乎背离、并且大间距的两部相机之间的外参标定;例如图1所示的轮对检测系统,其在左右两侧轨道处分别安装两部传感器(内含相机),形成多对无公共视场的相机组,并且无公共视场的两部相机镜头近乎背离。
- 还没有人留言评论。精彩留言会获得点赞!