基于关键工厂的航天构件分布式柔性车间调度方法及系统
本发明涉及一种车间调度方法及系统,尤其是基于关键工厂的航天构件分布式柔性车间调度方法及系统。
背景技术:
1、航空构件作为飞机的重要部件,在生产过程中需严格把关,部分航空构件包含精工序,需高技能员工操作高精度机器完成加工。因此,对该类航空构件进行生产调度时,不仅要考虑机器约束,还要兼顾操作员工的技能约束,具有双资源约束特性。面对航空构件的大规模订单,若由一个工厂独立完成难以满足订单的交货期要求,因此需要分布式工厂协作完成,通过多个工厂并行生产不仅可以缩短生产周期,还可以充分发挥每个分布式工厂的优势,提高生产效率。
2、但目前的分布式柔性车间调度方法无法同时考虑双资源约束和分布式车间的要求,只能针对单一条件进行求解,并且现有的进化算法在求解过程中对种群采取相同操作,忽视不同状态下个体进化程度差异,过强的个体竞争易使算法早熟陷入局部最优,从而导致整体的搜索过程随机性较大,搜索效率下降,收敛速度较慢。
技术实现思路
1、发明目的:本发明的目的是提供一种同时考虑双资源约束特性和分布式工厂,能提升种群多样性和搜索能力的航天构件分布式柔性车间调度方法及系统。
2、技术方案:本发明所述的基于关键工厂的航天构件分布式柔性车间调度方法,包括如下步骤:
3、(1)建立航天构件分布式柔性车间调度模型;
4、(2)初始化种群,采用四层编码方式表示染色体信息;第一层为工厂编码串fs,用于确定构件所选的工厂;第二层为工序编码串os,用于确定构件的加工顺序;第三层为机器编码串ms,用于表示工序分配到的机器;第四层为员工编码串ws,用于确定机器选择的员工;
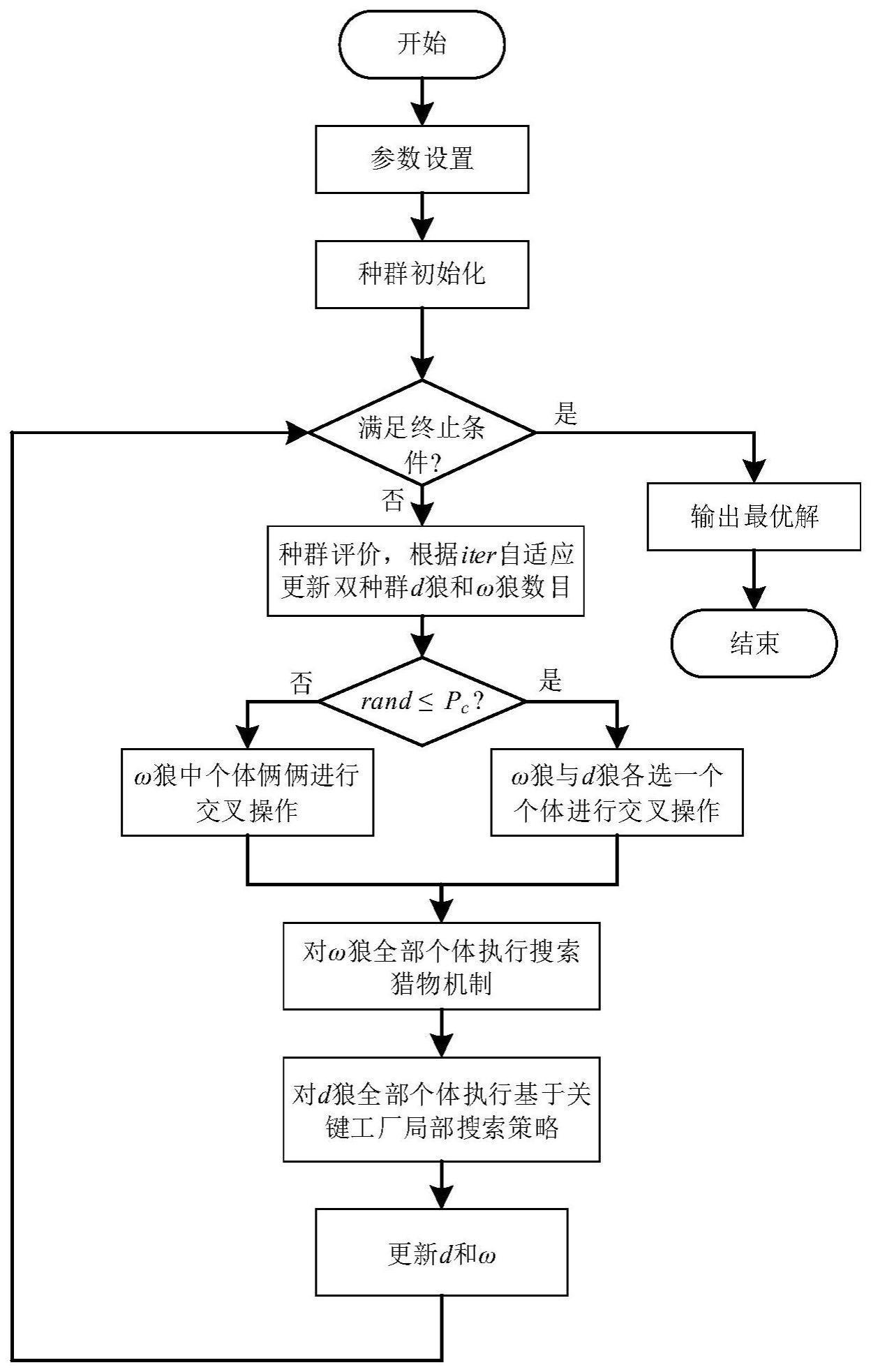
5、(3)判断是否达到终止条件,如果达到则输出航天构件分布式柔性车间调度的最优解;否则执行步骤(4);
6、(4)狼群所有个体进行解码,计算适应度值,执行交叉操作,生成新种群,并确定决策狼个体;
7、(5)对所有附属狼个体进行贪婪搜索;
8、(6)根据关键工厂对所有决策狼个体进行局部搜索,返回步骤(3);所述关键工厂为所有工厂中完工时间最大的工厂。
9、进一步地,步骤(5)所述对所有附属狼个体进行贪婪搜索包括:针对所述工厂编码串fs,找到分配构件最多的工厂,随机抽取其中一个构件分配到其它任意工厂;若分配构件最多的工厂为多个,则随机选择一个工厂并随机抽取一个构件分配到其它任意工厂;针对所述工序编码串os,随机选择两个不同构件的精工序,置换其位置;针对所述机器编码串ms,随机选取一个位置,若为普通工序则随机选择一个其它可加工机器,若为精工序则选择可选员工最多的机器;针对所述员工编码串ws,随机选取一道精工序,在可选员工中选择被分配精工序数目最少的员工。
10、进一步地,步骤(6)所述根据关键工厂对所有决策狼个体进行局部搜索包括:针对所述工厂编码串fs,随机选择关键工厂中的一个构件,随机分配到其他任意工厂;针对所述工序编码串os,利用关键路径产生邻域解的方法进行局部搜索;针对所述机器编码串ms,计算每台机器的负载,从具有最大负载的机器上随机选择一道工序,在该工序的可选机器中,随机选择其它机器为加工机器;针对所述员工编码串ws,计算每位员工的工作时长,从具有最长工时的员工任务中随机选择一道精工序,对执行该精工序的机器的可选员工中,随机选择其他一位员工为操作员工。
11、进一步地,步骤(4)所述狼群所有个体进行解码包括:根据工序加工所需时间、机器和员工的加工时间以及机器和员工的空闲时间计算该工序的开始时间和完工时间。
12、进一步地,所述根据工序加工所需时间、机器和员工的加工时间以及机器和员工的空闲时间计算该工序的开始时间和完工时间包括:获取工序oij加工所需时间tijfk、机器mfk加工时间[stm,etm]和员工wfg的加工时间[stw,etw],机器mfk和员工wfg的对应空闲时间[astm,aetm]、[astw,aetw];
13、当oij是工件首工序时且机器和员工都未进行加工,工序开始时间sij=0,完工时间cij=sij+tijfk;否则:
14、当机器有空闲、员工无空闲时,且aetm≥max{etw}&&astm≥ci(j-1)&&astm+tijfk≤aetm时,sij=astw,cij=sij+tijfk;
15、当机器无空闲、员工有空闲时,且aetm≥max{etw}&&astw≥ci(j-1)&&astm+tijfk≤aetw时,sij=astw,cij=sij+tijfk;
16、当机器和员工均有空闲时,且max(astm,astw)≥ci(j-1)&&max(astm,astw)+tijfk≤min(astm,astw)时,sij=max{astm,astw},cij=sij+tijfk;
17、当机器和员工均无空闲时间时,sij=max{ci(j-1),etm,etw},cij=sij+tijfk。
18、进一步地,步骤(4)所述计算适应度值,执行交叉操作包括:在区间[0,1]中随机生成数值rand,若rand≤pc,决策狼和附属狼各选择一个个体进行交叉;若rand>pc,则附属狼个体两两进行交叉;其中pc为自适应交叉选择概率。
19、进一步地,针对所述工厂编码串fs执行多点交叉操作,针对所述工序编码串os执行ipox交叉操作,针对所述机器编码串ms和所述员工编码串ws执行mpx交叉操作。
20、进一步地,步骤(1)所述航天构件分布式柔性车间调度模型的目标函数为其中;ci为第i个工厂的完工时间,i=1,2,3…n;
21、所述航天构件分布式柔性车间调度模型的约束条件包括工厂约束、工序约束、机器约束、构件加工时间约束和员工约束。
22、进一步地,步骤(2)所述初始化种群包括:初始化种群大小、迭代次数,决策狼数目初始比例以及局部搜索最大迭代次数。
23、本发明所述基于关键工厂的航天构件分布式柔性车间调度系统,包括:
24、模型建立单元:用于建立航天构件分布式柔性车间调度模型;
25、初始化单元:用于初始化种群,采用四层编码方式表示染色体信息;第一层为工厂编码串fs,用于确定构件所选的工厂;第二层为工序编码串os,用于确定构件的加工顺序;第三层为机器编码串ms,用于表示工序分配到的机器;第四层为员工编码串ws,用于确定机器选择的员工;
26、优化求解单元,用于对狼群所有个体进行解码,计算适应度值,执行交叉操作,生成新种群,并确定决策狼个体;对所有附属狼个体进行贪婪搜索,根据关键工厂对所有决策狼个体进行局部搜索;直至达到终止条件,输出航天构件分布式柔性车间调度的最优解;所述关键工厂为所有工厂中完工时间最大的工厂。
27、有益效果:与现有技术相比,本发明的优点在于:(1)本发明既考虑分布式工厂的协作需求,又兼顾机器和员工的双资源约束,构建具有双资源约束特征的分布式柔性作业车间调度模型,以解决航空结构件实际生产中的工厂选择、工序排序、机器选择和员工选择4个子问题;(2)本发明利用灰狼优化算法进行求解,针对四个子问题提出四种操作算子,针对编码特性设计一种多约束捕猎机制,增强了种群多样性和算法全面性,提高了算法求解的稳定性;(3)本发明针对关键工厂进行局部搜索,基于关键工厂设计4种邻域结构,进一步提高算法的局部搜索能力。
- 还没有人留言评论。精彩留言会获得点赞!