基于视觉的空间目标关键部位检测识别方法、装置及设备与流程
本发明涉及目标识别,更具体的说是涉及一种基于视觉的空间目标关键部位检测识别方法、装置及设备。
背景技术:
1、随着宇航技术的不断进步,飞行器发射的频率越来越高,在轨废弃卫星逐渐增多,长期轨道驻留已经成为影响太空正常飞行器运转的隐患。如何对空间目标进行有效的监视,让失效、近失效飞行器有序退出或消除其安全隐患,已经成为当前宇航领域关注的热点。
2、针对寿命末期的卫星主要有三种操作模式:(1)在轨加注、维修、维护;(2)在轨拖拽至废弃轨道;(3)地面遥控实施坠毁。考虑到卫星较高的价值以及维护手段的不断成熟,在轨加注、维修、维护已经成为该领域研究的主要方向。
3、空间维修维护的关键在于,地面研制、组装阶段确定维护接口,设计标准化机械、电缆、接插件规范;在轨作业过程,维护卫星主要依赖视觉感知,逐步靠近目标卫星,识别关键部件及组件,依靠机械臂进行维修维护。基于视觉感知的目标卫星及其部件在轨检测识别,识别精度会受到卫星姿态、光照强弱、背景复杂度、距离远近等因素的影响,特别是在地球背景影响下,部件识别往往受到较大干扰。有些设计采用多载荷融合方式,但对不同环境及目标,融合方法和效果并没有固定方法,在实际应用中仍然是以全色光为主。
4、该领域已经有多个开源数据库,包含了不同姿态、类型、背景、载荷下的目标成像数据,近年来主要是结合深度学习,通过大量样本的训练实现识别的适应性,主要是集中在公开数据集、检测识别的有效性上,很少考虑在轨嵌入式系统计算实时性,也没有考虑在轨测试过程中图像数据从分辨率到清晰度都和公开数据集有着较大差距。这些差距主要体现在三个方面:(1)无法或无法及时调整焦距,导致目标卫星成像清晰度不足,目标的信噪比较低,影响特征解算及识别;(2)在轨目标分辨率与距离相关,不同应用模式下距离不固定,特别是对某些非合作目标,持续观测时间可能很短导致无法近距离成像;(3)在轨成像光照条件变化较大,很可能目标成像区域都属于阴影部分,这也导致识别的正确率会下降。
技术实现思路
1、有鉴于此,本发明提供了一种基于视觉的空间目标关键部位检测识别方法、装置及设备,可实现大视场范围内目标卫星的检测和关键部位的有效识别,并有效降低计算量。
2、为了实现上述目的,本发明采用如下技术方案:
3、第一方面,本发明提供一种基于视觉的空间目标关键部位检测识别方法,其特征在于,包括以下步骤:
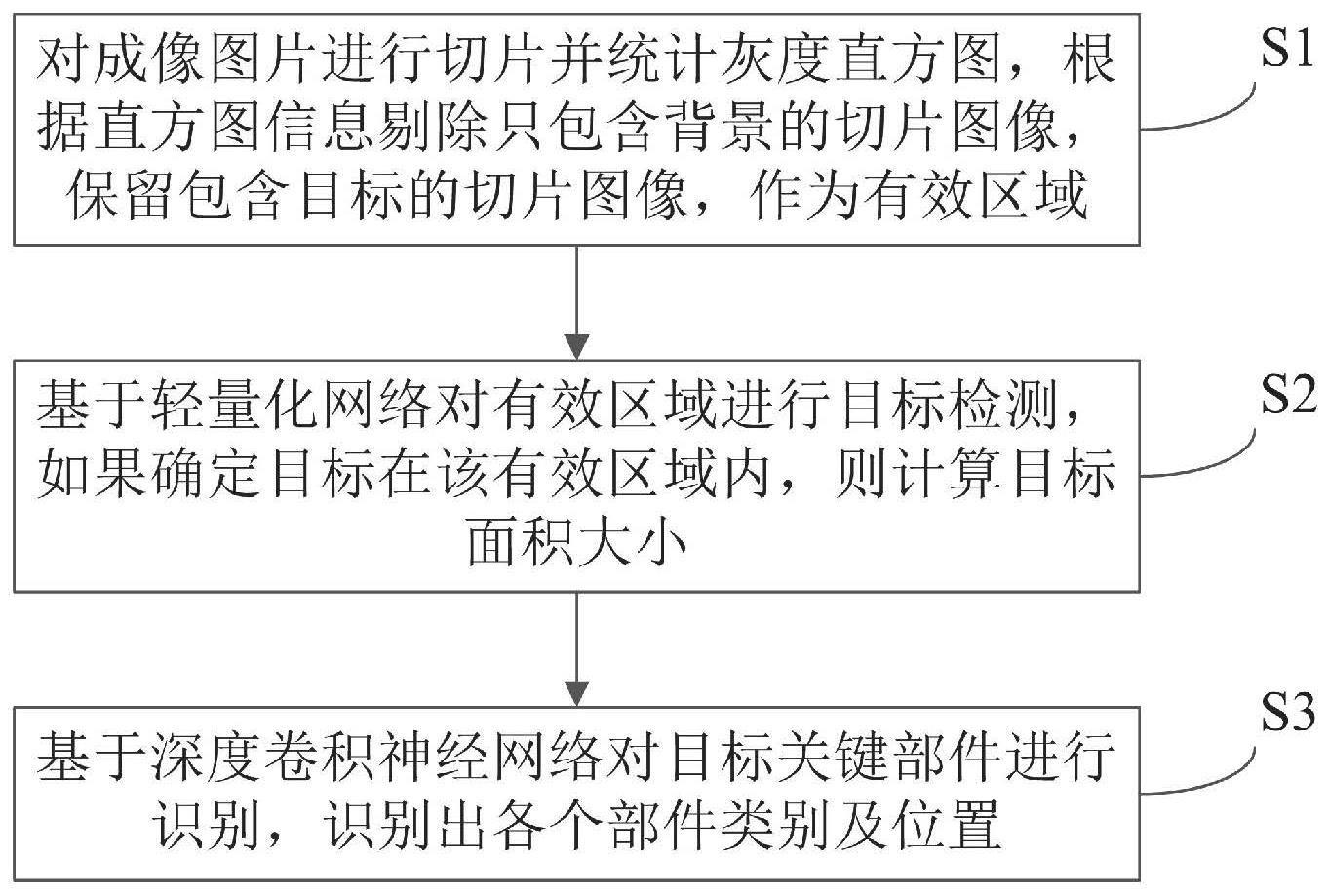
4、s1、对成像图片进行切片并统计灰度直方图,根据直方图信息剔除只包含背景的切片图像,保留包含目标的切片图像,作为有效区域;
5、s2、基于轻量化网络对有效区域进行目标检测,如果确定目标在该有效区域内,则计算目标面积大小;
6、s3、基于深度卷积神经网络对目标关键部件进行识别,识别出各个部件类别及位置。
7、进一步的,s1包括:
8、根据当前目标距离折算出目标显示在成像图片中的最大像素数;
9、根据成像图片的长宽、检测网格大小和折算出的目标显示在成像图片中的最大像素数,对成像图片进行切片;
10、逐一对单个切片图像进行直方图计算,得到每个切片图像的直方图函数;
11、根据预设的判别阈值判断各单个切片图像的直方图函数中是否存在目标,若不存在目标,则认为该切片图像为纯粹星空背景,并进行剔除,若存在目标,则认为该切片图像为有效区域。
12、进一步的,对成像图片进行切片的个数为:
13、p=[n/(m-a)]2
14、其中,p表示切片图像个数;n表示成像图像的长度和宽度;m表示检测网格大小;a表示根据当前目标距离折算出的目标显示在成像图片中的最大像素数。
15、进一步的,单个切片图像的直方图函数h(n)为:
16、
17、其中,i'(i,j)(x,y)表示切片图像;i、j分别表示切片图像的行、列序号;x,y∈[0,m-1],表示图像平面上任意一点x和y的坐标。
18、进一步的,所述判别阈值包括灰度阈值和对比度阈值,判断切片图像中有无目标的判别公式为:
19、
20、其中,nt表示灰度阈值;β0和β1表示对比度阈值;f(i'(i,j))=[0,1,2]表示切片图像有无目标;(n∈[0,65535],n∈z+,表示16位图像的灰度直方图的灰度轴数值;当在β0和β1之间时认为有小目标;当大于β1时认为有大目标,进行部件识别。
21、进一步的,s2中,所述轻量化网络为简化的yolo模型,简化的yolo模型包含6层卷积、5个maxpooling层和1个yolo层。
22、进一步的,s2中,基于轻量化网络检测出有效区域中存在目标时,计算目标的中心点和长宽数值,确定目标面积大小,若大于设定面积,对有效区域进行切片。
23、进一步的,s3中采用的深度卷积神经网络与s2中采用的轻量化网络结构相同,但网络参数不同。
24、第二方面,本发明提供一种基于视觉的空间目标关键部位检测识别装置,其特征在于,包括:
25、有效区域确定模块,用于对成像图片进行切片并统计灰度直方图,根据直方图信息剔除只包含背景的切片图像,保留包含目标的切片图像,作为有效区域;
26、目标识别模块,用于基于轻量化网络对有效区域进行目标检测,如果确定目标在该有效区域内,则计算目标面积大小;
27、关键部件识别模块,用于基于深度卷积神经网络对目标关键部件进行识别,识别出各个部件类别及位置。
28、第三方面,本发明提供一种目标检测识别设备,包括处理器和存储器;所述存储器上存储有能够在所述处理器上运行的计算机程序;所述处理器运行所述计算机程序时,执行上述基于视觉的空间目标关键部位检测识别方法的步骤。
29、经由上述的技术方案可知,与现有技术相比,本发明具有以下有益效果:
30、本发明针对数据特征对传统的基于cnn的方法进行了改进,结合直方图统计特性进行目标区域的初步剔除,保证了大部分星空背景在后续的操作中不进行计算;对剔除后余留有效区域首先进行目标的检测识别,判定目标大小后再进行关键部件的识别,有效降低了不适于部件识别数据的冗余计算;同时,部件识别算法与飞行器目标识别算法采用了统一的计算架构,降低了工程化设计过程的复杂度,只需要更高权重参数即可实现不同任务识别,有效降低了资源占用。本发明有效实现了空间目标的关键部件检测识别,具有较好的适应性以及较小的计算量。
技术特征:
1.一种基于视觉的空间目标关键部位检测识别方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于视觉的空间目标关键部位检测识别方法,其特征在于,s1包括:
3.根据权利要求2所述的基于视觉的空间目标关键部位检测识别方法,其特征在于,对成像图片进行切片的个数为:
4.根据权利要求2所述的基于视觉的空间目标关键部位检测识别方法,其特征在于,单个切片图像的直方图函数h(n)(为:
5.根据权利要求2所述的基于视觉的空间目标关键部位检测识别方法,其特征在于,所述判别阈值包括灰度阈值和对比度阈值,判断切片图像中有无目标的判别公式为:
6.根据权利要求1所述的基于视觉的空间目标关键部位检测识别方法,其特征在于,s2中,所述轻量化网络为简化的yolo模型,简化的yolo模型包含6层卷积、5个maxpooling层和1个yolo层。
7.根据权利要求1所述的基于视觉的空间目标关键部位检测识别方法,其特征在于,s2中,基于轻量化网络检测出有效区域中存在目标时,计算目标的中心点和长宽数值,确定目标面积大小,若大于设定面积,对有效区域进行切片。
8.根据权利要求6所述的基于视觉的空间目标关键部位检测识别方法,其特征在于,s3中采用的深度卷积神经网络与s2中采用的轻量化网络结构相同,但网络参数不同。
9.一种基于视觉的空间目标关键部位检测识别装置,其特征在于,包括:
10.一种目标检测识别设备,其特征在于,包括处理器和存储器;所述存储器上存储有能够在所述处理器上运行的计算机程序;所述处理器运行所述计算机程序时,执行如权利要求1-8任一项所述的基于视觉的空间目标关键部位检测识别方法的步骤。
技术总结
本发明涉及目标检测识别技术领域,具体涉及一种基于视觉的空间目标关键部位检测识别方法、装置及设备,方法包括:对成像图片进行切片并统计灰度直方图,根据直方图信息剔除只包含背景的切片图像,保留包含目标的切片图像,作为有效区域;基于轻量化网络对有效区域进行目标检测,如果确定目标在该有效区域内,则计算目标面积大小;基于深度卷积神经网络对目标关键部件进行识别,识别出各个部件类别及位置。本发明可实现大视场范围内目标卫星的检测和关键部位的有效识别,并有效降低计算量。
技术研发人员:黄丹,禹霁阳,卢玲
受保护的技术使用者:中国兵器科学研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!