基于无人机的市政设施故障检测系统的制作方法
本发明涉及市政设施故障检测,更具体地说,它涉及基于无人机的市政设施故障检测系统。
背景技术:
1、市政设施是指由政府、法人、或公民出资建造的公共设施,一般指规划区内的各种城市道路。在城市道路中路面裂缝通常是最为严重的故障之一,其表面裂缝密度较大的路段需要定期进行检测和养护,以保证车辆的安全运行。
2、然而,现有技术中的裂纹检测一般是基于多个地面移动机器人进行目视检测,该方法会造成故障检测技术既耗时又昂贵;并且由于检查人员的主观判断,使得检测结果的客观性受到限制,降低检测结果的准确性。
3、由此,本发明提供了基于无人机的市政设施故障检测系统,改善了上述技术问题。
技术实现思路
1、本发明的目的是提供基于无人机的市政设施故障检测系统,解决了现有技术中的裂纹检测一般是基于多个地面移动机器人进行目视检测,该方法会造成故障检测技术既耗时又昂贵;并且由于检查人员的主观判断,使得检测结果的客观性受到限制,降低检测结果的准确性的技术问题。
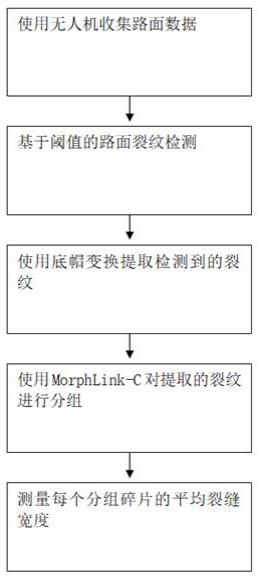
2、本发明的上述技术目的是通过以下技术方案得以实现的:基于无人机的市政设施故障检测系统,包括如下步骤:s1、使用无人机收集路面数据;
3、s2、基于阈值的路面裂纹检测;
4、s3、使用底帽变换提取检测到的裂纹;
5、s4、使用morphlink-c对提取的裂纹进行分组;
6、s5、测量每个分组碎片的平均裂缝宽度。
7、作为本发明的一种优选技术方案,所述无人机收集路面数据的过程为:
8、s1.1、无人机对路面进行多角度航拍;
9、s1.2、点云3d建模;
10、识别点云中出现的与路面的相同部分和相对应的重叠点,设pa和pb为在位置a和b处记录的点云,重叠点由下式确定:
11、
12、其中和是重叠点,用于表示近邻;τ是预先定义的距离阈值;然后通过应用迭代最近点算法找到最小化点云之间距离的变换,来获得点云的对齐;
13、s1.3、几何特征提取;
14、设定一个平面方程:(ax+by+cz+d=0);设m表示待辨识的参数向量;其中,m=[a,b,c,d]t;
15、设一个正常数为∈,其中∈>0;使得簇被定义为一组点:
16、c={pi∈p|min||pi-pj||>∈};对于不属于该簇的任何其他点,即被认为是障碍物;
17、s1.4、采集路径规划邻域中的一个像素移动到另一个像素的成本计算如下:
18、c(k,l,m)=a1k2+a2l2+a3m2;
19、其中,坐标k,l,m∈{-1,0,1}表示相邻位置,系数a1,a2和a3为每个方向分配特定的权重;每个方向分配特定的权重作为无人机运动控制的参考。
20、作为本发明的一种优选技术方案,所述基于阈值的路面裂纹检测的过程包括:图像拼接、拼接图案去除和裂纹检测。
21、作为本发明的一种优选技术方案,所述拼接图像由裂纹区域、拼接图案和空白区域组成;由于裂纹区域、拼接图案和空白区域之间的亮度随着光照度而变化;则需要先检测与这些元素相对应的主峰;分割待检测路面的阈值t1和t2计算为强度平均值:
22、
23、其中ib、iw和ip分别是空白区域、路面和拼接图案对应的峰值强度值;
24、根据直方图识别拼接图案,计算公式为:
25、
26、其中igr(x,y)和ir(x,y)分别是p(x,y)点处拼接图像的灰度强度和红色通道强度,β是选择用于区分该图案与其他图案的强度值图像的部分;β设置为255。
27、作为本发明的一种优选技术方案,所述裂纹检测的过程为:
28、先利用自动峰值检测对图像进行预处理,仅保留背景和线状物体,然后应用局部调整的阈值来识别潜在的裂缝;
29、设x和y方向的像素为(xi,yi);其中,i=1,2,...,n2;通过使用n×n确定像素p(x,y)邻域中的窗口,并且m(x,y)和s(x,y)分别作为该窗口中的平均值和标准偏差;m(x,y)和s(x,y)的计算公式为:
30、
31、
32、作为本发明的一种优选技术方案,所述像素p(x,y)的阈值计算公式为:
33、
34、其中,r是标准差的动态范围,k是一个可调参数,用于调整标准偏差的影响;
35、根据其阈值t(x,y)评估每个像素p(x,y);若像素p(x,y)的灰度强度igr(x,y)高于计算的局部阈值,则该像素p(x,y)属于裂纹,否则认为是背景。
36、作为本发明的一种优选技术方案,所述底帽变换提取检测到的裂纹过程为:
37、设{p}为二维数字图像中的像素集;使得{p}能够将x、y平面划分为一个网格,每个网格的中心坐标是笛卡尔坐标中的一对元素(x,y);若(x,y)是{p}中的整数,并且f是为每个不同的(x,y)对分配强度值的映射,则函数f(x,y)为数字图像二值图像的形状应用于输入图像,使得结构元素是二进制图像组件,结构元素边界内的像素被赋予值1,其余像素的值被赋予零;
38、图像处理中的原始图像o与结构元素s的膨胀和腐蚀分别表示为和
39、设开运算的计算公式为:闭运算的计算公式为:
40、作为本发明的一种优选技术方案,通过底帽和顶帽变换来提取检测到的裂纹黑白裂纹,底帽lb和顶帽lt变换的计算公式分别如下:
41、
42、
43、其中,l表示作为形态变换输出的灰度图像;o表示原始灰度图像;s{0°,45°,90°,135°}表示线形结构元素旋转0°、45°、90°和135°;°表示开变换;·表示闭变换。
44、作为本发明的一种优选技术方案,所述morphlink-c对提取的裂纹进行分组的过程为:
45、s4.1、将形态膨胀变换应用于包含裂纹碎片的二值图像,计算公式为:
46、
47、其中,b表示包含裂纹碎片的二值图像;sd表示膨胀变换的结构元素;表示形态膨胀算子;d表示膨胀变换后生成的二值图像;
48、s4.2、对d应用形态细化变换,将碎片连接为膨胀边界内的连续裂纹线,计算公式为:t=d-hit-and-miss(d,st);
49、其中,hit-and-miss是形态学的hit-and-miss算子;st表示骨架化的结构元素;t表示细化变换后得到的二值图像。
50、作为本发明的一种优选技术方案,所述测量每个分组碎片的平均裂缝宽度的计算公式为:
51、
52、其中,∑i(带边框裂纹像素的面积)k表示第k个膨胀边界内碎片裂纹像素的总面积之和;i表示第k个膨胀边界中碎片对象的索引;∑i(连接裂纹的长度)k表示第k个膨胀边界内连接裂纹线的总长度之和。
53、综上所述,本发明具有以下有益效果:先使用激光扫描仪创建结构的3d模型,再基于该模型,提取几何属性以生成导航无人机拍摄路面图像所需的航路点,完成数据收集;然后通过直方图分析和峰值检测对所得图像进行聚类,并通过使用局部自适应阈值来检测路面裂纹;路面裂纹检测过程自动进行,缩短了检查时间,也降低了市政设施故障检测的成本费用。接着,通过morphlink-c对提取的裂纹进行分组,提高了裂纹分类结果的准确性;最后,测量每个分组碎片的平均裂缝宽度,从而无需对任意裂纹类型进行复杂的裂纹方向、长度和强度计算,进一步缩短检查时间。
- 还没有人留言评论。精彩留言会获得点赞!