一种基于道路线激光的车辙沉陷拥包的定量检测方法与流程
本发明涉及道路工程领域,具体是一种基于道路线激光的车辙沉陷拥包的定量检测方法。
背景技术:
1、随着我国道路交通建设的飞速发展,我国已建成庞大的市政、高速、中低道路网络,而大体量的道路设施也给路面病害检测、路面管养带来极大的挑战。
2、近年来随着深度学习在计算机视觉领域的推广应用,新型的道路轻量化检测系统也部分替代了传统检测方法,但目前针对沉陷、拥包、车辙、错台等变形类病害的识别虽然有一定进展,有部分研究实现了通过道路线激光结合深度学习进行定性的分析来判断是否存在上述变形类病害,但是仍然缺少对上述变形类病害的定量分析。
3、现有的道路车辙沉陷拥包定量检测的方法主要依靠路面多功能检测车、3d激光点云等方法。
4、通过路面多功能检测车来测量路面的车辙,需对车辆进行特殊改装,设备数量有限,无法大面积、高频次使用,且该类型设备一般只用于道路的年度检测,无法指导日常的管养。
5、3d激光点云的方法利用激光雷达获取路面的3d激光点云数据,进而对车辙沉陷及拥包进行分析提取,但该方法由于激光雷达成本较高,不利于推广使用。
技术实现思路
1、本发明的目的在于提供一种基于道路线激光的车辙沉陷拥包的定量检测方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于道路线激光的车辙沉陷拥包的定量检测方法,所述方法包括:
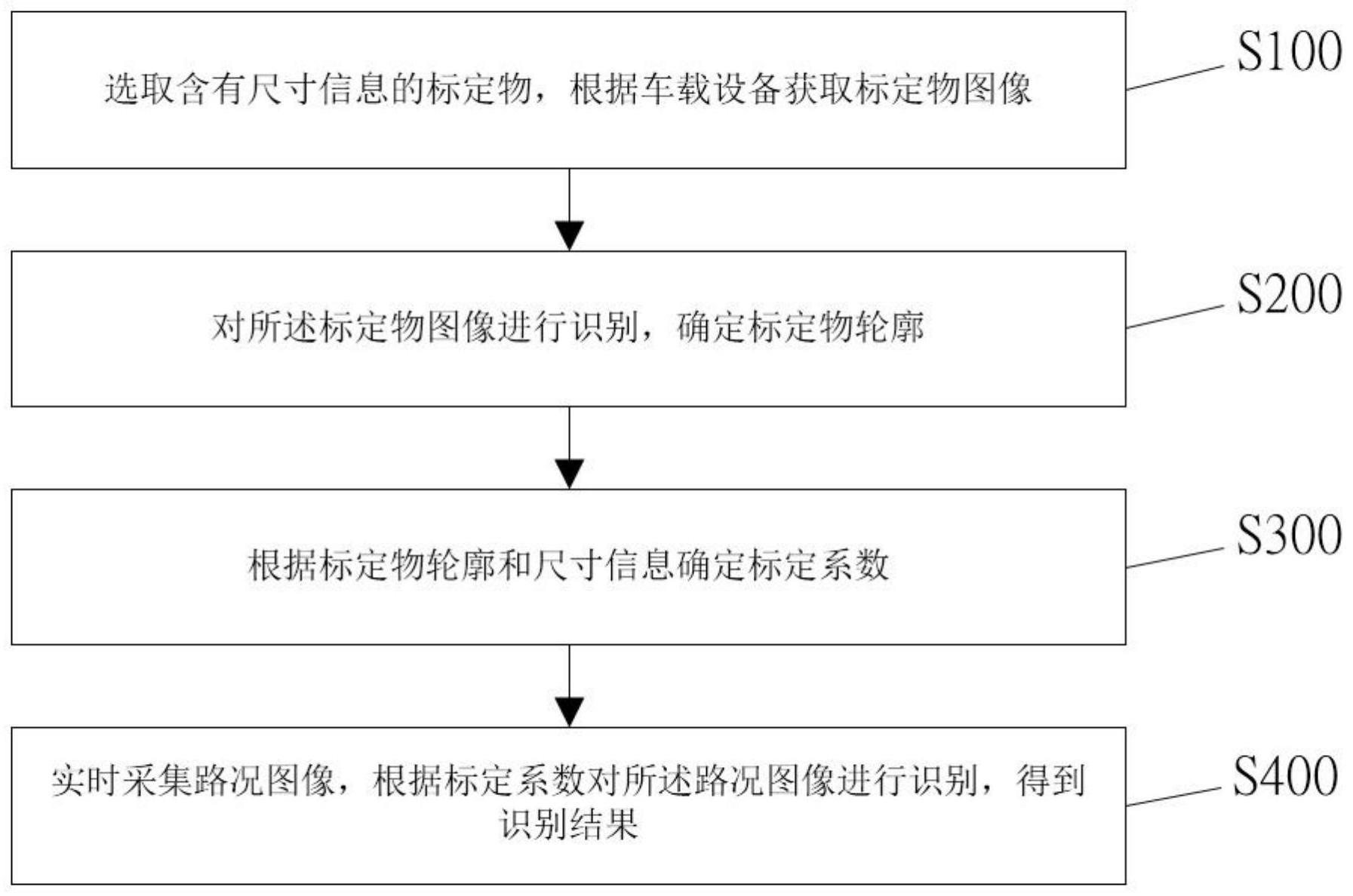
4、选取含有尺寸信息的标定物,根据车载设备获取标定物图像;
5、对所述标定物图像进行识别,确定标定物轮廓;
6、根据标定物轮廓和尺寸信息确定标定系数;所述标定系数包括深度转换系数和宽度转换系数;
7、实时采集路况图像,根据标定系数对所述路况图像进行识别,得到识别结果。
8、作为本发明进一步的方案:所述选取含有尺寸信息的标定物,根据车载设备获取标定物图像的步骤包括:
9、根据预安装的线激光发射器实时获取路面平整度,根据路面平整度选取测试路段;
10、实时获取车体位置,当车体位置到达测试路段时,发送标定物释放指令;
11、根据车载设备获取标定物图像。
12、作为本发明进一步的方案:所述对所述标定物图像进行识别,确定标定物轮廓的步骤包括:
13、实时计算标定物图像中相邻像素点的色差;
14、将所述色差与预设的色差阈值进行比对;
15、当所述色差达到预设的色差阈值时,标记对应的相邻像素点;
16、连接标记的相邻像素点,得到标定物轮廓。
17、作为本发明进一步的方案:所述根据标定物轮廓和尺寸信息确定标定系数的步骤包括:
18、计算标定物轮廓的纵向平均距离和横向平均距离;
19、读取标定物的尺寸信息,所述尺寸信息包括高度和长度;
20、根据所述高度和所述纵向平均距离计算深度转换系数;
21、根据所述长度和所述横向平均距离计算宽度转换系数。
22、作为本发明进一步的方案:所述实时采集路况图像,根据标定系数对所述路况图像进行识别,得到识别结果的步骤包括:
23、根据车载设备实时采集路况图像;
24、对路况图像进行轮廓识别,确定待检轮廓;
25、计算待检轮廓的纵向平均距离和横向平均距离;
26、根据深度转换系数将纵向平均距离转换为深度;
27、根据宽度转换系数将横向平均距离转换为宽度;
28、记录采集位置,统计并打包采集位置、路况图像、深度和宽度,作为识别结果。
29、作为本发明进一步的方案:车载设备的采集帧率不低于60fps,车体上安装有编码器,根据编码器实时获取车辆的运动距离,根据所述运动距离生成指向车载设备的拍摄指令。
30、与现有技术相比,本发明的有益效果是:本发明相较于既有的重型检测设备,主要依赖于轻量化传感器,利用智能算法可应对外部干扰,极大地降低了设备成本、运行成本。通过提前标定,可准确计算病害的实际宽度和深度;借助于边缘计算及人工智能算法,可实时计算实现变形类病害的范围和病害程度,路面变形类病害的巡检效率显著提高。
技术特征:
1.一种基于道路线激光的车辙沉陷拥包的定量检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于道路线激光的车辙沉陷拥包的定量检测方法,其特征在于,所述选取含有尺寸信息的标定物,根据车载设备获取标定物图像的步骤包括:
3.根据权利要求1所述的基于道路线激光的车辙沉陷拥包的定量检测方法,其特征在于,所述对所述标定物图像进行识别,确定标定物轮廓的步骤包括:
4.根据权利要求1所述的基于道路线激光的车辙沉陷拥包的定量检测方法,其特征在于,所述根据标定物轮廓和尺寸信息确定标定系数的步骤包括:
5.根据权利要求1所述的基于道路线激光的车辙沉陷拥包的定量检测方法,其特征在于,所述实时采集路况图像,根据标定系数对所述路况图像进行识别,得到识别结果的步骤包括:
6.根据权利要求5所述的基于道路线激光的车辙沉陷拥包的定量检测方法,其特征在于,车载设备的采集帧率不低于60fps,车体上安装有编码器,根据编码器实时获取车辆的运动距离,根据所述运动距离生成指向车载设备的拍摄指令。
技术总结
本发明涉及道路工程领域,具体公开了一种基于道路线激光的车辙沉陷拥包的定量检测方法,所述方法包括选取含有尺寸信息的标定物,根据车载设备获取标定物图像;对所述标定物图像进行识别,确定标定物轮廓;根据标定物轮廓和尺寸信息确定标定系数;所述标定系数包括深度转换系数和宽度转换系数;实时采集路况图像,根据标定系数对所述路况图像进行识别,得到识别结果。本发明依赖于轻量化传感器,利用智能算法可应对外部干扰,极大地降低了设备成本、运行成本。通过提前标定,可准确计算病害的实际宽度和深度;借助于边缘计算及人工智能算法,可实时计算实现变形类病害的范围和病害程度,路面变形类病害的巡检效率显著提高。
技术研发人员:杨强,陈勇勇,严京旗,曾杰,欧阳天雨
受保护的技术使用者:上海同陆云交通科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!