气泡三维形态重构方法、装置、电子设备和存储介质
本技术涉及图像处理领域,尤其涉及一种气泡三维形态重构方法、装置、电子设备和存储介质。
背景技术:
1、气液两相流动广泛应用于环境能源、化学工程、船海工程等领域。气泡两相流动处于湍流状态,具有强三维性,亟需发展三维气泡形态测量技术实现气泡三维信息的全捕捉,这对深入认识气泡形态变化规律,揭示两相流物理机理具有重要意义。
2、常见的气泡形态测量方法可分为侵入式测量和非侵入式测量两类。
3、其中,侵入式测量只能测量有限离散点的数据,易受噪声干扰,无法对具体的气泡形态进行测量。非侵入式测量方法以hsp(high speed photography,高速摄像)技术为主,基于像素位置识别气泡二维形态。在进行三维形态重构时,通常假设气泡是一个规则的椭球体,然后对图像中的气泡进行椭圆拟合或求出其外接矩形,获得椭圆各个轴的长度,进而重构出气泡的三维形状,该方法适用范围有限,在气泡直径较大或者形状不规则时重构出的气泡的三维形态误差较大。
技术实现思路
1、本技术提供一种气泡三维形态重构方法、装置、电子设备和存储介质,用以解决重构出的气泡的三维形态误差较大的问题。
2、第一方面,本技术实施例提供一种气泡三维形态重构方法,包括:
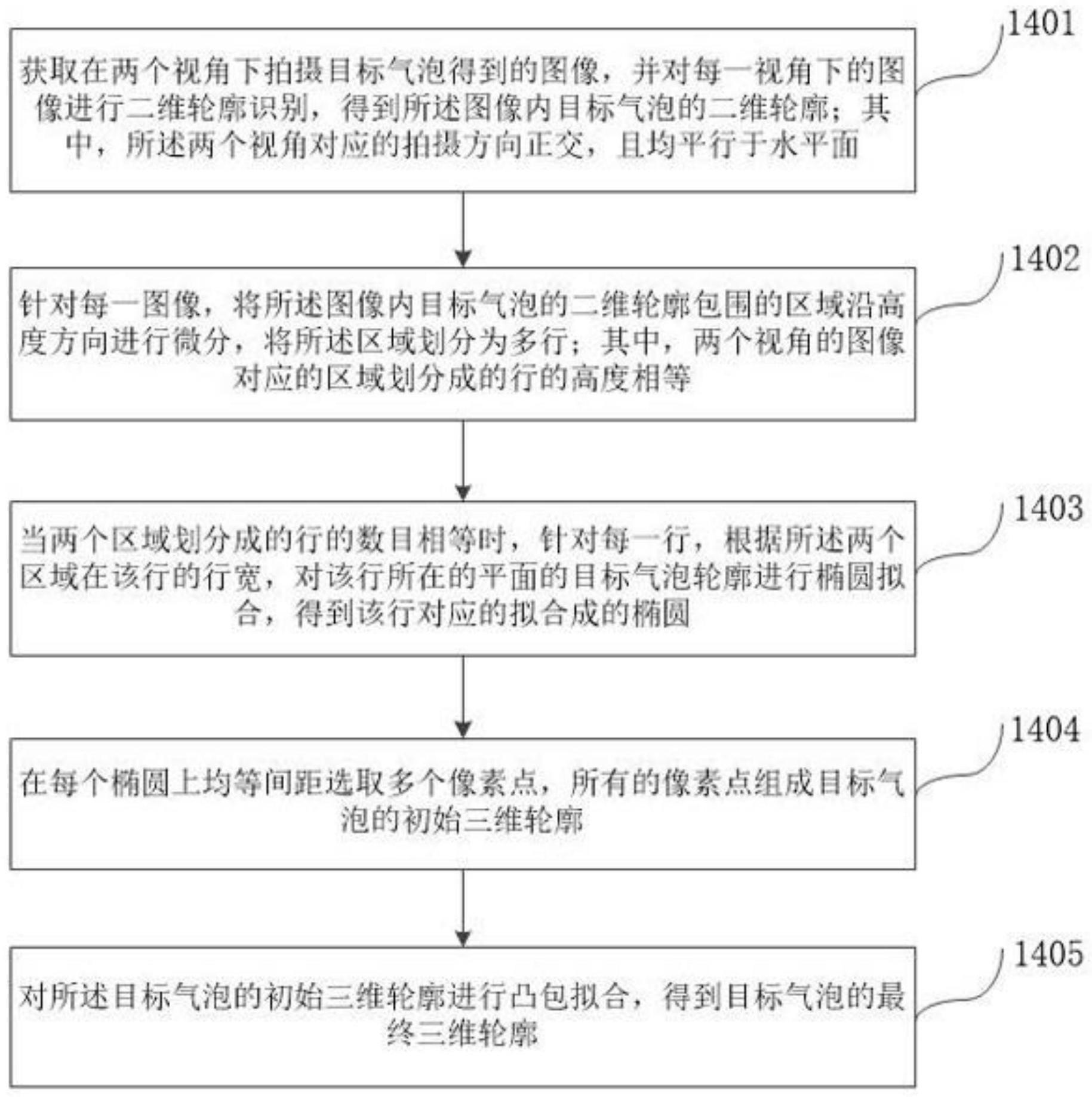
3、获取在两个视角下拍摄目标气泡得到的图像,并对每一视角下的图像进行二维轮廓识别,得到所述图像内目标气泡的二维轮廓;其中,所述两个视角对应的拍摄方向正交,且均平行于水平面;
4、针对每一图像,将所述图像内目标气泡的二维轮廓包围的区域沿高度方向进行微分,将所述区域划分为多行;其中,两个视角的图像对应的区域划分成的行的高度相等;
5、当两个区域划分成的行的数目相等时,针对每一行,根据所述两个区域在该行的行宽,对该行所在的平面的目标气泡轮廓进行椭圆拟合,得到该行对应的拟合成的椭圆;
6、在每个椭圆上均等间距选取多个像素点,所有的像素点组成目标气泡的初始三维轮廓;
7、对所述目标气泡的初始三维轮廓进行凸包拟合,得到目标气泡的最终三维轮廓。
8、可选的,对所述目标气泡的初始三维轮廓进行凸包拟合,得到目标气泡的最终三维轮廓,包括:
9、从目标气泡的初始三维轮廓中任意选取四个非共面点,所述四个非共面点构成一个凸多面体;
10、重复执行下述步骤,直至初始三维轮廓上的所有点都不处于凸多面体外;
11、在凸多面体外部任意选择初始三维轮廓上的一个点,作为基准点;
12、根据凸多面体任一表面的外法线向量与该表面上的任意一点指向基准点的向量的内积的正负,确定所述凸多面体上保留下来的边线;
13、在所述凸多面体的基础上加入保留下来的边线与基准点构成的表面,形成更新后的凸多面体。
14、可选的,根据凸多面体任一表面的外法线向量与该表面上的任意一点指向基准点的向量的内积的正负,确定所述凸多面体上保留下来的边线,包括:
15、针对凸多面体的每一表面,根据该表面的外法线向量与该表面上的任意一点指向基准点的向量的内积的正负,确定该表面是否被保留;
16、根据凸多面体各个表面是否被保留,确定凸多面体各个边线是否被保留。
17、可选的,所述针对凸多面体的每一表面,根据该表面的外法线向量与该表面上的任意一点指向基准点的向量的内积的正负,确定该表面是否被保留,包括:
18、针对凸多面体的每一表面,若该表面的外法线向量与该表面上的任意一点指向基准点的向量的内积为正,则删除该表面;若该表面的外法线向量与该表面上的任意一点指向基准点的向量的内积为负,则保留该表面;
19、所述根据凸多面体各个表面是否被保留,确定凸多面体各个边线是否被保留,包括:针对所述凸多面体的每一边线,若该边线所在的两个表面均被删除,则该边线被删除;若所在的两个表面中任一表面被保留,则该边线被保留。
20、可选的,针对每一行,根据所述两个区域在该行的行宽,对该行所在的平面的目标气泡轮廓进行椭圆拟合,得到该行对应的拟合成的椭圆,包括:
21、针对每一行,将所述两个区域在该行的行宽分别作为椭圆的长轴长度和短轴长度,对该行所在的平面的目标气泡轮廓进行椭圆拟合,得到该行对应的拟合成的椭圆。
22、可选的,所述方法还包括:
23、当两个区域划分成的行的数目不相等时,去掉行数更多的区域中宽度最短的行,直至两个区域划分成的行的数目相等,并对两个区域进行椭圆拟合和凸包拟合,得到目标气泡的最终三维轮廓。
24、第二方面,本技术实施例提供一种气泡三维形态重构系统,包括:
25、气泡发生装置,用于产生目标气泡;
26、两个相机,分别用于拍摄目标气泡在不同视角下的图像;
27、处理装置,用于执行上述任一方面所述的方法。
28、第三方面,本技术实施例提供一种气泡三维形态重构装置,包括:
29、识别模块,用于获取目标气泡在两个视角下拍摄的图像,并对每一图像进行二维轮廓识别,得到所述图像内目标气泡的二维轮廓;其中,所述两个视角对应的拍摄方向正交,且均平行于水平面;
30、微分模块,用于针对每一图像,将所述图像内目标气泡的二维轮廓包围的区域沿高度方向进行微分,将所述区域划分为多行;其中,两个图像对应的区域划分成的行的高度相等;
31、第一拟合模块,用于当两个区域划分成的行的数目相等时,针对每一行,根据所述两个区域在该行的行宽,对该行所在的平面的目标气泡轮廓进行椭圆拟合,得到该行对应的拟合成的椭圆;
32、选取模块,用于在每个椭圆上均等间距选取多个像素点,所有的像素点组成了目标气泡的初始三维轮廓;
33、第二拟合模块,用于对所述目标气泡的初始三维轮廓进行凸包拟合,得到目标气泡的最终三维轮廓。
34、第四方面,本技术实施例提供一种电子设备,包括:
35、至少一个处理器;以及与所述至少一个处理器通信连接的存储器;
36、其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述电子设备执行上述任一方面所述的方法。
37、第五方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,当处理器执行所述计算机执行指令时,实现上述任一方面所述的方法。
38、本技术实施例提供的气泡三维形态重构方法、装置、电子设备和存储介质,包括:获取在两个视角下拍摄目标气泡得到的图像,并对每一视角下的图像进行二维轮廓识别,得到所述图像内目标气泡的二维轮廓;其中,所述两个视角对应的拍摄方向正交,且均平行于水平面;针对每一图像,将所述图像内目标气泡的二维轮廓包围的区域沿高度方向进行微分,将所述区域划分为多行;其中,两个视角的图像对应的区域划分成的行的高度相等;当两个区域划分成的行的数目相等时,针对每一行,根据所述两个区域在该行的行宽,对该行所在的平面的目标气泡轮廓进行椭圆拟合,得到该行对应的拟合成的椭圆;在每个椭圆上均等间距选取多个像素点,所有的像素点组成目标气泡的初始三维轮廓;对所述目标气泡的初始三维轮廓进行凸包拟合,得到目标气泡的最终三维轮廓。本技术实施例可以对正交视角下图像中的气泡进行轮廓识别,之后进行像素级微分,对每个像素平面进行椭圆拟合,最后进行凸包拟合获取气泡形态,能够在气泡体积较大或形状不规则的情况下准确识别气泡形状,特别是气泡局部曲率有较大变化时不会造成气泡形态的局部凹陷或突起,有效减小的重构的误差,提高重构准确性。
- 还没有人留言评论。精彩留言会获得点赞!