一种基于时间序列二维编码的紧组合导航故障检测方法
本发明涉及组合导航,尤其涉及一种基于时间序列二维编码的紧组合导航故障检测方法。
背景技术:
1、随着无人机、自动驾驶等技术的发展,导航系统对精度和可靠性需求不断提升,gps/ins紧组合导航由于其定位精度和稳定性较高而越来越收到重视。其中,为了保证系统的定位精度,完好性和可靠性,及时进行故障检测和排除具有十分重要的意义。由于惯性导航系统inss发生故障的概率很小,本方法仅针对gnss系统的故障检测。
2、随着数据驱动技术的发展,利用深度学习进行组合导航故障检测的方法开始逐步被探索和应用。目前对组合导航的检测方法主要是将导航数据(经归一化处理后)直接输入到神经网络中进行特征提取和学习,从而在故障来临时完成对故障的识别工作。但仍然会面临故障检测的敏感度不高以及训练样本不均衡问题。
技术实现思路
1、鉴于上述的分析,本发明旨在公开了一种基于时间序列二维编码的紧组合导航故障检测方法;提高故障检测的敏感度。
2、本发明公开了一种基于时间序列二维编码的紧组合导航故障检测方法,包括:
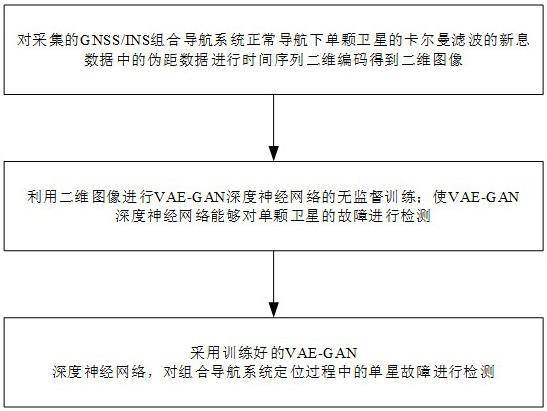
3、步骤s1、对采集的gnss/ins组合导航系统正常导航下单颗卫星的卡尔曼滤波的新息数据中的伪距数据进行时间序列二维编码得到二维图像;
4、步骤s2、利用二维图像进行vae-gan深度神经网络的无监督训练;使vae-gan深度神经网络能够对单颗卫星的故障进行检测;
5、步骤s3、采用训练好的vae-gan深度神经网络,对组合导航系统定位过程中的单星故障进行检测。
6、进一步地,在步骤s1中,所述时间序列二维编码采用时间序列的gasf编码。
7、进一步地,时间序列的gasf编码的过程包括:
8、1)采集的gnss/ins组合导航系统正常导航下单颗卫星的卡尔曼滤波的新息数据中的伪距时间序列;
9、2)进行时间序列进行归一化得到时间序列;
10、3)将归一化的时间序列编码为角余弦;
11、4)考虑每个像点之间的角求和的余弦来体现不同时间间隔内的时间相关性建立二维图像。
12、进一步地,在gnss/ins组合导航系统的卡尔曼滤波过程中获得的新息数据为:
13、;
14、其中,为观测量,;分别为ins推算的伪距、伪距率;分别为gnss单颗卫星推算的伪距、伪距率;为系统的观测矩阵;为组合导航系统的状态一步预测值;
15、取一段时间连续长度为的新息序列构成向量;再提取向量的第一行得到伪距时间序列:
16、。
17、进一步地,考虑每个像点之间的角求和的余弦来体现不同时间间隔内的时间相关性建立二维图像为:
18、;
19、其中,;;。
20、进一步地,所述vae-gan深度神经网络中,vae解码器和gan生成器采用同一网络模块;利用二维图像进行vae-gan深度神经网络的无监督训练过程,包括:
21、1)vae编码器训练;使用平铺处理后的图像数据为输入样本训练vae编码器,更新vae编码器参数;使vae编码器生成的样本在被vae解码器/gan生成器解码后尽量复原为输入样本;
22、2)gan判别器训练;使用平铺处理后的图像样本数据、vae解码器对图像样本数据复原的数据和vae解码器根据分布生成的数据训练gan判别器,更新gan判别器参数;使gan判别器能够判别出真实的图像样本数据;
23、3)vae解码器/gan生成器训练;使vae解码器/gan生成器解码后尽量复原为vae编码器的输入样本。
24、进一步地,将训练样本的二维图像经过平铺处理后为,为维向量,vae通过编码器对编码后生成一个服从均值为,方差为的分布的样本;
25、vae编码器的损失函数为:
26、;
27、在散度误差项中,为对角矩阵,对角线上的元素为中的元素,即;重构误差;
28、根据网络的损失函数反向传播并更新网络参数得到的vae编码器的最优参数为:
29、。
30、进一步地,gan判别器的损失函数为:
31、;
32、其中,为对输入gan判别器的图像样本数据的判决结果,为输入gan判别器的数据的判决结果,为输入gan判别器的数据的判决结果;
33、根据网络的损失函数反向传播并更新网络参数得到的gan判别器最优参数为:
34、。
35、进一步地,vae解码器/gan生成器的损失函数为:
36、;
37、其中,为调节权重的参数;
38、根据网络的损失函数反向传播并更新网络参数得到vae解码器/gan生成器网络的最优参数为:
39、。
40、进一步地,在步骤s3中采用训练好的vae-gan深度神经网络,对组合导航系统定位过程中的单星故障进行检测过程,包括:
41、1)在测试时,采用固定时间序列长度,以步长为1进行时间序列更新,使时间序列结束时间总为当前时刻t,得到长度为待检测时间序列;
42、2)将当期时刻t将待检测时间序列进行如步骤s1中的时间序列二维编码得到真实二维图像;
43、3)将当期时刻t二维图像平铺处理后的向量数据在训练好的vae-gan网络中进行编码-解码后得到复原的数据;
44、4)计算向量数据和复原的数据的均方误差;
45、5)判断均方误差是否超出预先设定的阈值;是,则判定为有故障;否则判定为无故障。
46、本发明可实现以下有益效果之一:
47、本发明公开的方法利用深度神经网络优秀的图像特征识别和学习能力,提高系统对故障的敏感度。并且采用无监督学习方法训练网络,只学习正常数据的特征,避免了故障检测训练中样本不均衡的问题。
技术特征:
1.一种基于时间序列二维编码的紧组合导航故障检测方法,其特征在于,包括:
2.根据权利要求1所述的基于时间序列二维编码的紧组合导航故障检测方法,其特征在于,
3.根据权利要求1所述的基于时间序列二维编码的紧组合导航故障检测方法,其特征在于,
4.根据权利要求1所述的基于时间序列二维编码的紧组合导航故障检测方法,其特征在于,
5.根据权利要求4所述的基于时间序列二维编码的紧组合导航故障检测方法,其特征在于,
6.根据权利要求1所述的基于时间序列二维编码的紧组合导航故障检测方法,其特征在于,
7.根据权利要求6所述的基于时间序列二维编码的紧组合导航故障检测方法,其特征在于,
8.根据权利要求7所述的基于时间序列二维编码的紧组合导航故障检测方法,其特征在于,
9.根据权利要求8所述的基于时间序列二维编码的紧组合导航故障检测方法,其特征在于,
10.根据权利要求3-9任一项所述的基于时间序列二维编码的紧组合导航故障检测方法,其特征在于,
技术总结
本发明涉及一种基于时间序列二维编码的紧组合导航故障检测方法,属于组合导航技术领域,方法包括:对采集的GNSS/INS组合导航系统正常导航下单颗卫星的卡尔曼滤波的新息数据中的伪距数据进行时间序列二维编码得到二维图像;利用二维图像进行VAE‑GAN深度神经网络的无监督训练;使VAE‑GAN深度神经网络能够对单颗卫星的故障进行检测;采用训练好的VAE‑GAN深度神经网络,对组合导航系统定位过程中的单星故障进行检测。本发明提高系统对故障的敏感度,避免了故障检测训练中样本不均衡的问题。
技术研发人员:薛瑞,杜雨舒
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!