一种基于卷积深度神经网络的汽车轮心垂向位移求解方法与流程
本发明属于汽车仿真领域,具体涉及一种基于卷积深度神经网络的汽车轮心垂向位移求解方法。
背景技术:
1、汽车零部件外联点的载荷谱无法直接通过传感器测量,需要通过多体动力学仿真软件将测试得到的六分力分解到各个零部件,测量的六分力不能直接施加到多体动力学模型,否则数值求解容易出现不收敛,无法正常求解整车零部件载荷,为了求解整车零部件的疲劳耐久载荷,需要基于虚拟迭代方法,根据实际测量的悬架位移及轮心加速度求解轮心的垂向位移。虚拟迭代是通过汽车悬挂系统的加速度响应及位移响应求解汽车轮心垂向位移的一种方法,传统虚拟迭代方法随着多体动力学模型建模越来越精细,虚拟迭代求解轮心垂向位移的周期越来越长。导致该方法使用成本高/周期长,最终导致汽车产品开发周期长,因此迫切需要有一种更好的轮心垂向位移求解方法。
技术实现思路
1、基于上述问题,本发明提供一种可以更加高效根据已知测量的响应求解轮心垂向位移的载荷分解方法。具体技术方案如下:
2、基于一维卷积深度神经网络的整车轮心垂向位移求解方法,流程步骤如下s1-s6:
3、s1:将待开发车型的基础物理样车进行实车测量道路载荷谱,包括用拉线位移传感器测量悬架位移ltest,轮心加速度acctest,轮心的六分力载荷fx,fy,fz,mx,my,mz;
4、s2:根据整车的参数搭建整车的多体动力学模型;
5、s3:将s1测量得到的ltest施加到s2中的整车多体动力学模型,求解仿真模型的悬架位移量lsimulation,轮心的垂向加速度accsimulation;
6、s4:构建一维卷积深度神经网络深度学习模型;
7、s5:s1中所测量的ltest和s3中仿真得到的悬架位移量lsimulation和轮心的垂向加速度accsimulation分别作为s4的深度学习模型输出和输入对神经网络进行训练,并对训练结果进行评价;
8、s6:将实测得到的轮心加速度acctest及悬架位移ltest经处理后输入深度神经网络,求解得到轮心的垂向位移dz。
9、进一步的,所述步骤s1中所述悬架位移为左前,右前,左后和右后四个四分之一悬架的相应值,轮心加速度为四个车轮的轮心加速度。
10、进一步的,步骤s2具体为根据待求解载荷的整车基于adams、simpack或motionview搭建整车多体动力学模型,然后对整车多体动力学模型的悬架进行垂向刚度对标,确保整车的垂向刚度和实车一致。
11、进一步的,步骤s3中仿真模型求解整车的四个车轮的轮心仿真加速度数据和四个四分之一悬架的位移数值。
12、进一步的,步骤s4中的神经网络模型具体为:
13、
14、式中对于卷积神经网络中的第 l 层网络:mj为输入特征矢量;k为卷积核;b为网络偏置;为第l层输出;为第l层输入特征值矢量mj中的各元素。
15、进一步的,步骤s5具体为:对s4构建的深度神经网络进行训练,首先将s3中的仿真悬架位移量数据以及仿真轮心加速度数据分别进行归一化处理作为深度学习模型输入的原始数据;将s1中的实际测试的悬架位移数据进行归一化处理作为神经网络训练的输出的原始数据;将每个归一化后的仿真加速度,仿真位移,测试位移基于时间窗口进行分割,分割为多份得到的数据即为训练数据。
16、进一步的,所述时间窗口的长度为含有60个不同时间点的长度,60为超参数,不同的动力学系统该超参数不同,需要进行调优。
17、进一步的,卷积神经网络中的3个卷积层和第一个全连接层的激活函数为relu,relu 函数定义为:当x>0,relu(x)=x,当x<=0,relu(x)=0,最后一个全连接层,激活函数为线性激活函数linear;神经网络模型的训练为自主编程或采用成熟的深度学习框架如paddlepaddle,或者tensorflow或者华为的mindspore;将训练数据集拆分为训练集,验证集和测试集,对神经网络模型进行训练,其中,仿真位移数据以及仿真加速度数据归一化后加窗处理后的数据为dnn的输入,实测数据归一化后加窗处理后的数据为dnn的输出,输入输出所对应的时间窗口的时间相同。
18、进一步的,s6具体为将实际测量得到的悬架位移数据以及轮心加速度数据经过归一化加滑动窗口分割为指定长度后,输入dnn则可输出整车四个车轮轮心垂向位移。
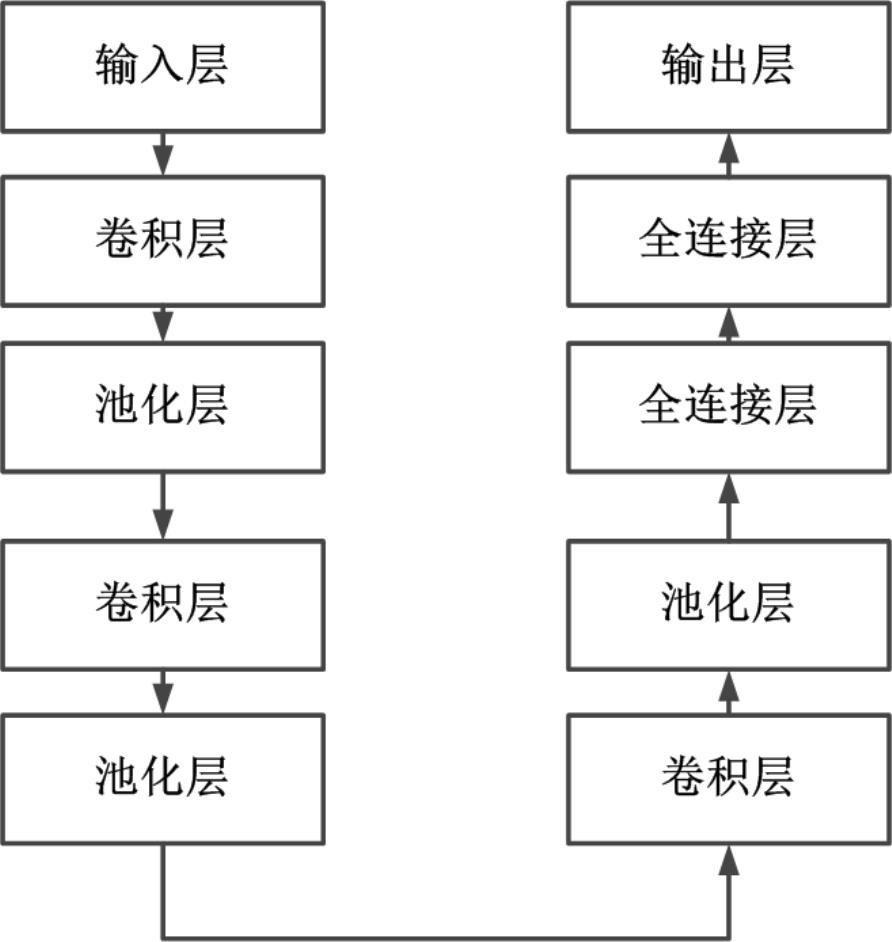
19、本申请采用的卷积神经网络是一种典型的前馈神经网络,其本质是通过建立多个“滤波器”提取输入数据的特征。通过多个滤波器对输入数据进行逐层卷积和池化,层层提取蕴含在输入数据中的隐藏特征。典型的卷积神经网络通常包含输入层、卷积层、池化层、全连接层和输出层,这些层级都可以看作是一种特殊的滤波器,每个层级对输入特征进行运算并输出,形成输出特征,不同层级的操作具备不同的实际意义。在卷积层中,卷积核对输入特征进行卷积操作,每一层的输出均为对多输入特征的卷积结果。
20、池化层用于缩减特征参数量,是对输入特征的缩放映射,一般采取平均池化或最大池化来降低特征尺寸,从而降低整个神经网络的运算参数规模,同时提高特征鲁棒性。非线性激活层在卷积神经网络中的意义体现于提高网络的非线性建模能力,无论是卷积层中的卷积运算还是池化层中的池化运算,某种意义上都是一种线性运算,这种线性运算只能为卷积神经网络提供线性建模能力,而现实世界所体现的模型并不是线性的;因此,在卷积神经网络中引入非线性激活层,为网络提供非线性建模能力。以relu函数为例,采用re lu非线性激活函数,可使卷积神经网络的一部分神经元输出为0,提高网络的稀疏性。
21、本发明基于卷积深度神经网络来进行整车轮心垂向位移的求解,效率远高于基于虚拟迭代法,实现周期缩短及成本降低。
技术特征:
1.基于一维卷积深度神经网络的整车轮心垂向位移求解方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的求解方法,其特征在于:所述步骤s1中所述悬架位移为左前,右前,左后和右后四个四分之一悬架的相应值,轮心加速度为四个车轮的轮心加速度。
3.根据权利要求1所述的求解方法,其特征在于:步骤s2具体为根据待求解载荷的整车基于adams、simpack或motion view搭建整车多体动力学模型,然后对整车多体动力学模型的悬架进行垂向刚度对标,确保整车的垂向刚度和实车一致。
4.根据权利要求1所述的求解方法,其特征在于:步骤s3中仿真模型求解整车的四个车轮的轮心仿真加速度数据和四个四分之一悬架的位移数值。
5.根据权利要求1所述的求解方法,其特征在于:步骤s4中的神经网络模型具体为:
6.根据权利要求1所述的求解方法,其特征在于:步骤s5具体为:对s4构建的深度神经网络进行训练,首先将s3中的仿真悬架位移量数据以及仿真轮心加速度数据分别进行归一化处理作为深度学习模型输入的原始数据;将s1中的实际测试的悬架位移数据进行归一化处理作为神经网络训练的输出的原始数据;将每个归一化后的仿真加速度,仿真位移,测试位移基于时间窗口进行分割,分割为多份得到的数据即为训练数据。
7.根据权利要求6所述的求解方法,其特征在于:所述时间窗口的长度为含有60个不同时间点的长度,60为超参数,不同的动力学系统该超参数不同,需要进行调优。
8.根据权利要求6所述的求解方法,其特征在于:卷积神经网络中的3个卷积层和第一个全连接层的激活函数为relu,relu 函数定义为:当x>0,relu(x)=x,当x<=0,relu(x)=0,最后一个全连接层,激活函数为线性激活函数linear;神经网络模型的训练为自主编程或采用成熟的深度学习框架如paddlepaddle,或者tensorflow或者华为的mindspore;将训练数据集拆分为训练集,验证集和测试集,对神经网络模型进行训练,其中,仿真位移数据以及仿真加速度数据归一化后加窗处理后的数据为dnn的输入,实测数据归一化后加窗处理后的数据为dnn的输出,输入输出所对应的时间窗口的时间相同。
9.根据权利要求1所述的求解方法,其特征在于:步骤s6具体为:将实际测量得到的悬架位移数据以及轮心加速度数据经过归一化加滑动窗口分割为指定长度后,输入dnn则可输出整车四个车轮轮心垂向位移。
技术总结
本发明属于汽车仿真领域,具体涉及一种基于卷积深度神经网络的汽车轮心垂向位移求解方法。包括如下步骤S1:将待开发车型的基础物理样车进行实车测量道路载荷谱,S2:根据整车的参数搭建整车的多体动力学仿真模型;S3:将S1测量得到的数据施加到S2中的整车多体动力学模型,求解仿真模型;S4:构建一维卷积深度神经网络深度学习模型;S5:将S1和S3数据分别作为S4的深度学习模型输出和输入对神经网络进行训练,并对训练结果进行评价;S6:将实测得到的数据经处理后输入深度神经网络,求解得到轮心的垂向位移。本发明基于卷积深度神经网络来进行整车轮心垂向位移的求解,效率远高于基于虚拟迭代法,实现周期缩短及成本降低。
技术研发人员:陈为欢,黄晖,熊伟,吴和兴,段龙杨,余显忠,赵军辉,曾建邦
受保护的技术使用者:江铃汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!