三维物体识别方法及装置与流程
本公开涉及物体识别,特别涉及一种三维物体识别方法及装置。
背景技术:
1、在进行三维物体识别时,需要得到物体的三维信息。现有技术中通常使用三维结构光技术测量三维物体的深度信息,但传统相位法三维轮廓测量系统的深度信息检测方案,存在精度差、检测距离范围受限、检测成本高等问题。
2、因此,如何实现多距离识别三维物体,优化物体三维信息的检测成本和检测精度是目前亟待解决的技术问题。
技术实现思路
1、本公开的目的是提供一种三维物体识别方法,以至少解决相关技术中如何实现多距离识别三维物体,优化物体三维信息的检测成本和检测精度的技术问题。
2、根据本公开实施例的一个方面,提供了一种三维物体识别方法,包括:
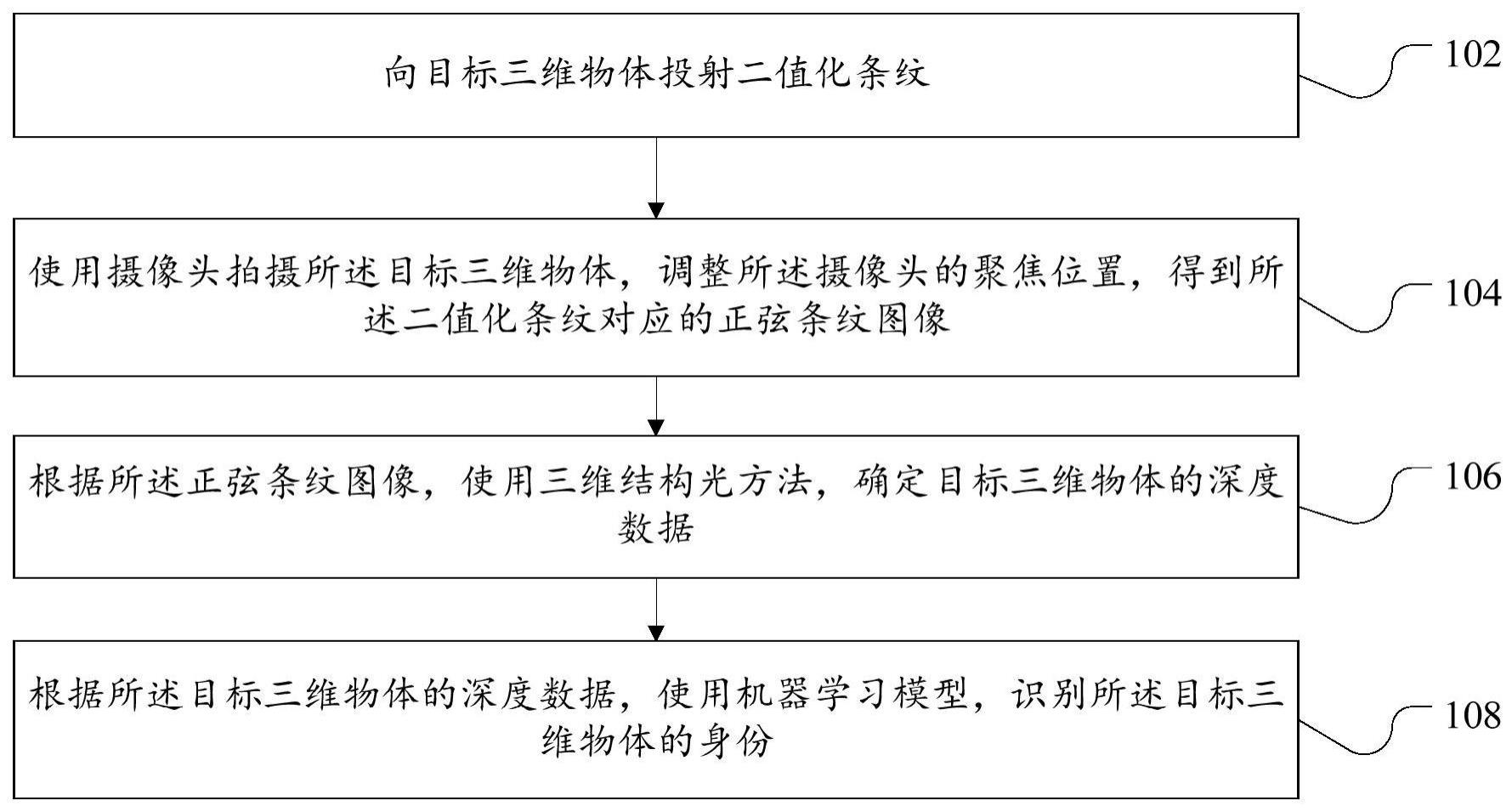
3、向目标三维物体投射二值化条纹;
4、使用摄像头拍摄所述目标三维物体,调整所述摄像头的聚焦位置,得到所述二值化条纹对应的正弦条纹图像;
5、根据所述正弦条纹图像,使用三维结构光方法,确定目标三维物体的深度数据;
6、根据所述目标三维物体的深度数据,使用机器学习模型,识别所述目标三维物体的身份。
7、在一个示例性实施例中,使用摄像头拍摄所述目标三维物体,调整所述摄像头的聚焦位置,得到所述二值化条纹对应的正弦条纹图像,包括:
8、获取所述目标三维物体与所述摄像头之间的距离信息;
9、获取所述目标三维物体对应的各个相位对焦pdaf像素的相位差;
10、获取预设的映射关系,所述映射关系用于,基于所述距离信息,确定所述正弦条纹图像对应的所述摄像头的聚焦位置;
11、根据所述映射关系、所述距离信息以及所述目标三维物体对应的各个pdaf像素的相位差,驱动所述摄像头的镜头到形成所述正弦条纹图像的聚焦位置。
12、在一个示例性实施例中,获取预设的映射关系,包括:
13、分别在不同的拍摄距离,使用pdaf技术对焦标定物,获取所述标定物对应的各个pdaf像素的相位差以及对应的所述摄像头的聚焦位置;
14、标定拍摄距离、pdaf像素的相位差以及所述摄像头的聚焦位置之间的映射关系。
15、在一个示例性实施例中,根据所述目标三维物体的深度数据,使用机器学习模型,识别所述目标三维物体的身份,包括:
16、获取所述目标三维物体的反射光的光谱信息,所述反射光由所述多光谱光源经所述目标三维物体反射形成;
17、根据所述目标三维物体的深度数据和所述目标三维物体的反射光的光谱信息,使用机器学习模型,识别所述目标三维物体的身份。
18、在一个示例性实施例中,根据所述目标三维物体的深度数据和所述目标三维物体的反射光的光谱信息,使用机器学习模型,识别所述目标三维物体的身份,包括:
19、对比所述多光谱光源的光谱信息和所述反射光的光谱信息,确定所述目标三维物体的光谱吸收信息;
20、根据所述目标三维物体的光谱吸收信息,确定所述目标三维物体的材质信息;
21、据所述目标三维物体的深度数据和所述目标三维物体的光谱吸收信息,使用机器学习模型,识别所述目标三维物体的身份。
22、在一个示例性实施例中,还包括:
23、基于训练样本,训练生成所述机器学习模型;
24、所述训练样本是预先标注的若干三维物体的深度数据和反射光的光谱信息训练数据组;所述训练样本的标注内容包括:若干人脸身份和物体属性。
25、在一个示例性实施例中,向目标三维物体投射二值化条纹包括:使用偏振光源向所述目标三维物体投射所述二值化条纹。
26、在一个示例性实施例中,向目标三维物体投射二值化条纹包括:
27、使用集成光源的mems振镜投射器模组投射所述二值化条纹。
28、在一个示例性实施例中,向目标三维物体投射二值化条纹,包括:
29、向所述目标三维物体投射无条纹图案,使用目标检测模型,预判断所述目标三维物体的尺寸;
30、获取所述目标三维物体与所述摄像头之间的距离信息;
31、根据所述距离信息和所述目标三维物体的尺寸,设置所述二值化条纹的周期宽度和条纹组数;
32、向所述目标三维物体投射二值化条纹。
33、在一个示例性实施例中,向目标三维物体投射二值化条纹包括:
34、在所述距离信息和所述目标三维物体的尺寸在预定范围内的情况下,设置所述二值化条纹的编码规则为格雷码。
35、根据本公开实施例的另一个方面,还提供了一种三维物体识别装置,包括:
36、投射模块,用于向目标三维物体投射二值化条纹;
37、调焦模块,用于使用摄像头拍摄所述目标三维物体,调整所述摄像头的聚焦位置,得到所述二值化条纹对应的正弦条纹图像;
38、深度模块,用于根据所述正弦条纹图像,使用三维结构光方法,确定目标三维物体的深度数据;
39、识别模块,用于根据所述目标三维物体的深度数据,使用机器学习模型,识别所述目标三维物体的身份。
40、在一个示例性实施例中,所述调焦模块包括:
41、距离信息子模块,用于获取所述目标三维物体与所述摄像头之间的距离信息;
42、相位差子模块,用于获取所述目标三维物体对应的各个相位对焦pdaf像素的相位差;
43、映射子模块,用于获取预设的映射关系,所述映射关系用于,基于所述距离信息,确定所述正弦条纹图像对应的所述摄像头的聚焦位置;
44、驱动子模块,用于根据所述映射关系、所述距离信息以及所述目标三维物体对应的各个pdaf像素的相位差,驱动所述摄像头的镜头到形成所述正弦条纹图像的聚焦位置。
45、在一个示例性实施例中,所述映射子单元包括:
46、获取单元,用于分别在不同的拍摄距离,使用pdaf技术对焦标定物,获取所述标定物对应的各个pdaf像素的相位差以及对应的所述摄像头的聚焦位置;
47、标定单元,用于标定拍摄距离、pdaf像素的相位差以及所述摄像头的聚焦位置之间的映射关系。
48、在一个示例性实施例中,
49、所述识别模块包括:
50、光谱子模块,用于获取所述目标三维物体的反射光的光谱信息,所述反射光由所述多光谱光源经所述目标三维物体反射形成;
51、识别子模块,用于根据所述目标三维物体的深度数据和所述目标三维物体的反射光的光谱信息,使用机器学习模型,识别所述目标三维物体的身份。
52、在一个示例性实施例中,所述识别子模块包括:
53、吸收确定单元,用于对比所述多光谱光源的光谱信息和所述反射光的光谱信息,确定所述目标三维物体的光谱吸收信息;
54、材质确定单元,用于根据所述目标三维物体的光谱吸收信息,确定所述目标三维物体的材质信息;
55、识别单元,用于根据所述目标三维物体的深度数据和所述目标三维物体的光谱吸收信息,使用机器学习模型,识别所述目标三维物体的身份。
56、在一个示例性实施例中,所述三维物体识别装置还包括:
57、训练模块,用于基于训练样本,训练生成所述机器学习模型;
58、所述训练样本是预先标注的若干三维物体的深度数据和反射光的光谱信息训练数据组;所述训练样本的标注内容包括:若干人脸身份和物体属性。
59、在一个示例性实施例中,所述投射模块包括:
60、偏振子模块,用于使用偏振光源向所述目标三维物体投射所述二值化条纹。
61、在一个示例性实施例中,所述投射模块包括:
62、振镜子模块,用于使用集成光源的mems振镜投射器模组投射所述二值化条纹。
63、在一个示例性实施例中,所述投射模块包括:
64、预判断子模块,用于向所述目标三维物体投射无条纹图案,使用目标检测模型,预判断所述目标三维物体的尺寸;
65、距离信息子模块,用于获取所述目标三维物体与所述摄像头之间的距离信息;
66、条纹设置子模块,用于根据所述距离信息和所述目标三维物体的尺寸,设置所述二值化条纹的周期宽度和条纹组数;
67、投射子模块,用于向所述目标三维物体投射二值化条纹。
68、在一个示例性实施例中,所述投射模块包括:
69、格雷码子模块,用于在所述距离信息和所述目标三维物体的尺寸在预定范围内的情况下,设置所述二值化条纹的编码规则为格雷码。
70、根据本公开实施例的另一个方面,还提供了一种计算机设备,所述计算机设备包括:适于实现各指令的处理器以及存储设备,所述存储设备存储有多条指令,所述指令适于由处理器加载并执行任一项上述的三维物体识别方法。
71、根据本公开实施例的另一个方面,还一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序用于执行任一项上述的三维物体识别方法。
72、根据本公开实施例的另一个方面,还一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现任一项上述的三维物体识别方法。
73、下面通过附图和实施例,对本公开的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!