救援无人机自动识别抓取AED装置的控制方法与流程
本发明涉及aed装置的高效抓取控制方法,具体涉及一种救援无人机自动识别抓取aed装置的控制方法。
背景技术:
1、医疗是人类社会的基本问题,很多时候病人的病情危重都是延迟、救护车迟到等原因造成的。自动体外除颤器又称自动体外电击器,简称aed,是一种便携式医疗设备,是可以被非专业人员使用的用于抢救心脏骤停患者的医疗设备。目前世界上最有效制止猝死的办法就是及时地利用aed对患者进行除颤和心肺复苏。但目前我国aed普遍使用率低,一旦出现患者心脏骤停需立马送去医院,遇到堵车等突发情况就会耽误救治的黄金时间,严重的话会危害到患者的生命安全。
2、我国密集场所中对aed的使用投放率低,通常患者将面临离医院太远或者在人群密集场所中携载aed的大型设备/救护车难以靠近等问题,出现这样的问题后就往往会错过最佳的抢救时间。针对类似的问题,有人提出了通过无人机运输aed的方案,使得aed能快速高效到达指定位置,在实际应用中发现,通过无人机来运输aed时,即涉及到aed的投放,也涉及到aed装置的识别抓取工作,无人机自动识别aed装置并且自动抓取aed装置,会极大地提升aed装置的转用效率,节约救援输送时间,提高患者的生存概率。
3、无人机通过机载机械臂实现对aed装置的抓取工作,首先需要获取aed装置的位置以及放置的姿态,因此,在控制无人机上机械臂抓取aed装置的前置条件是完成对aed装置的自主识及方向判断;
4、而由于无人机载重有限以及独特的高空视角,相较于通用目标识别场景,对aed装置的自主识别通常面临以下几个关键问题:
5、(1)一方面,由于无人机载重有限,不能配备高性能计算设备,机载计算机算力有限;另一方面,无人机的高机动特性导致无人机与目标相对运动速度较快,这对算法的实时性(实时一般是指帧率≥25hz)提出了更高的要求;因此,综合两个方面,识别算法要尽可能轻量化的同时提高识别帧率;
6、(2)不同于地面相机对地面目标识别的视角,无人机视角下目标可能是任意方向的。而机械臂要完成对aed装置的精确抓取,仅仅获取目标相对位置是不够的,还需要获取目标在图像2d平面的偏角(目标的方向)。因此,具体的控制方法中还需要获得目标的偏角信息,即aed装置的布置角度。
7、针对第一个问题,现有的实时目标检测方法中,主要分为以下几类:
8、(1)基于两阶段检测器的实时目标检测方法,如faster r-cnn(region-basedconvolutional neural network)等。这些方法通过首先生成候选区域,然后对这些候选区域进行分类和回归来检测目标。这类方法具有较高的精度,但对算力要求较高,一般部署在地面主机或高性能笔记本,在无人机机载计算机算力下,经过测试,测试帧率<5hz,远远达不到实时性要求;
9、(2)基于单阶段检测器的实时目标检测方法,如yolo(you only look once)系列,ssd(single shot multibox detector)等;这些方法采用单个神经网络来直接预测目标的类别和位置,并具有较快的速度和较高的准确率。但由于目标检测和分类是同时进行的,所以检测的精度较低,尤其是对于小目标和困难样本;
10、(3)基于注意力机制的实时目标检测方法,如squeeze-and-excitation networks(senet)等;这些方法使用注意力机制来学习不同特征图的重要性,从而提高目标检测的准确率,但这类方法计算量较大。
11、针对第二个问题,调研了现有的角度估计方法,主要有以下几种:
12、(1)基于霍夫变换的角度估计方法:该方法利用霍夫变换提取直线特征,并通过计算直线之间的角度来估计目标的角度,该方法适用于直线较明显的图像,对于目标边缘不明显的图像效果较差,同时容易受到噪声和干扰的影响;
13、(2)基于模板匹配的角度估计方法:该方法需要提前构建一个目标的2d模板,然后在输入图像中匹配模板,并通过匹配结果来估计目标的角度。该方法对于目标形状规则、边缘明显的情况效果较好,但对于目标形状复杂或存在遮挡等情况效果较差,同时,需要提前构建模板,模板质量直接影响估计精度;
14、(3)基于卷积神经网络的角度估计方法:该方法利用卷积神经网络对输入图像进行特征提取和分类,然后根据分类结果来估计目标的角度。可以自动学习特征,对于目标形状、姿态变化较大的情况具有较好的鲁棒性,可以实现端到端的训练和测试。但对于数据量和质量要求较高,人工标注成本较高;
15、(4)基于sift特征的角度估计方法:该方法利用sift算法提取输入图像中的关键点和特征,然后通过匹配关键点和特征来估计目标的角度。该方法对于目标形状变化较大或存在遮挡的情况效果较好,可以估计多个目标的角度。但sift算法计算量较大,适用于低速度应用场景,同时对于目标尺度变化较大的情况效果较差。
16、由于上述现有技术都不能满足无人机自动识别抓取aed装置的控制需求,本技术人对无人机的控制方案做了深入研究,以期待设计出一种能够解决上述问题,能够准确控制无人机识别并抓取aed装置的控制方法。
技术实现思路
1、为了克服上述问题,本发明人进行了锐意研究,设计出一种救援无人机自动识别抓取aed装置的控制方法,该方法中,在无人机中灌装两个改进的yolov5模型,分别针对大图像和小图像进行aed装置的识别工作,以便于兼顾准确度和降低运效率,并且根据具体情况实时切换使用两种模型;为了减小无人机上的运算量,降低aed装置布置角度的判断难度,将aed装置统一设置为比较规则的长方体结构,在此基础上,对目标外接矩形区域图像进行自适应二值化,再对二值化后的图像拟合最小面积外接矩形,读取该矩形边框的倾斜角度即可作为该外接矩形及aed装置的布置角度,从而完成本发明。
2、具体来说,本发明的目的在于提供一种救援无人机自动识别抓取aed装置的控制方法,
3、该方法包括如下步骤:
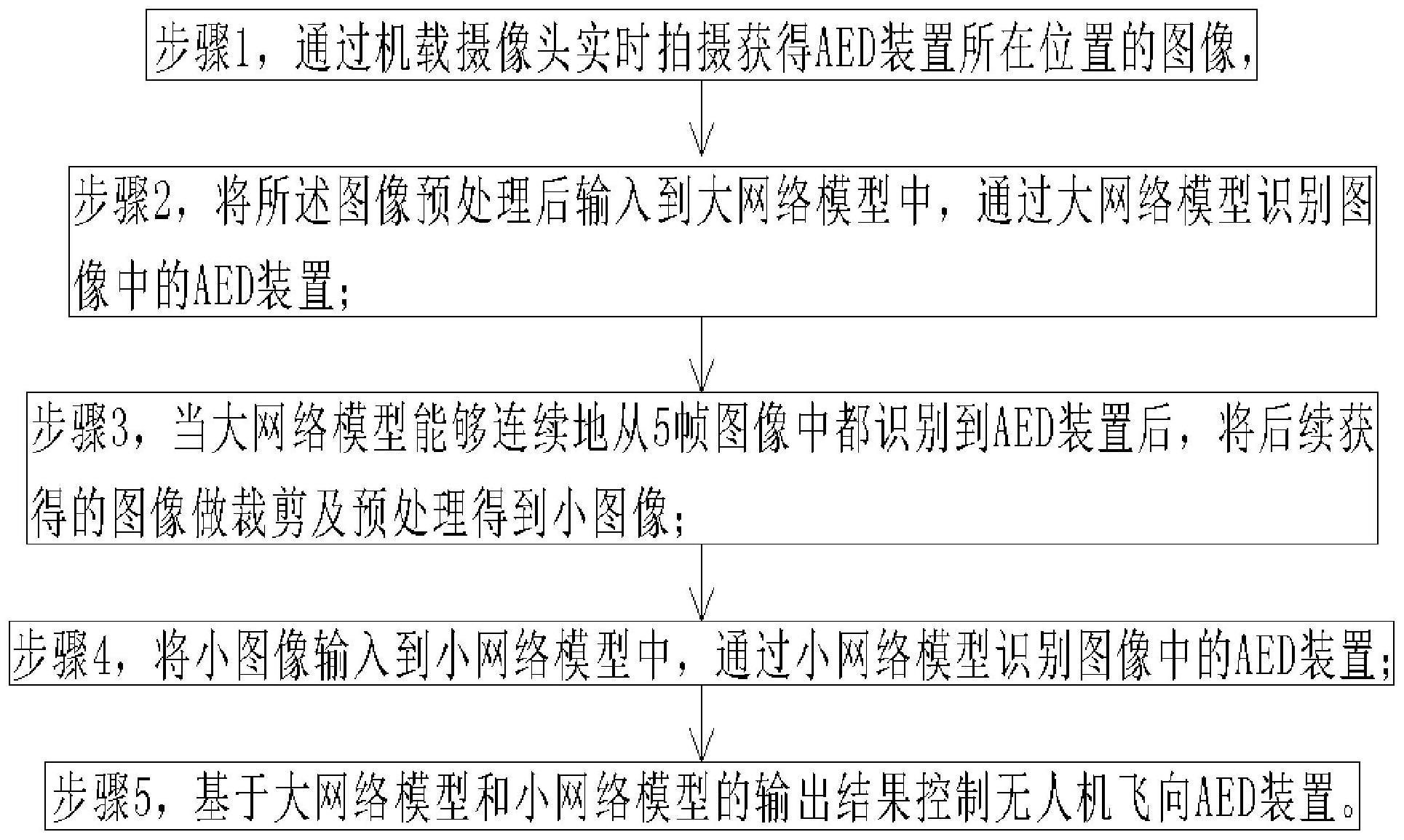
4、步骤1,通过机载摄像头实时拍摄获得aed装置所在位置的图像,
5、步骤2,将所述图像预处理后输入到大网络模型中,通过大网络模型识别图像中的aed装置;
6、步骤3,当大网络模型能够连续地从5帧图像中都识别到aed装置后,将后续获得的图像做裁剪及预处理得到小图像;
7、步骤4,将小图像输入到小网络模型中,通过小网络模型识别图像中的aed装置;
8、步骤5,基于大网络模型和小网络模型的输出结果控制无人机飞向aed装置。
9、其中,该方法还包括:
10、步骤6,在无人机邻近aed装置时,基于aed装置的布置角度控制无人机上的机械手抓取aed装置;
11、优选地,在获得小图像后,针对每一帧小图像,对目标外接矩形区域图像进行自适应二值化;对二值化后的图像拟合最小面积外接矩形,并将该外接矩形的方向作为aed装置的布置角度。
12、其中,在训练所述大网络模型时,训练用的图像分辨率为1280×1280;
13、在训练所述小网络模型时,训练用的图像分辨率为640×640。
14、其中,所述大网络模型的结构包括:backbone、neck和head三个部分;
15、所述backbone包含6个卷积模块、5个c3模块以及1个sppf模块;
16、所述neck包含6个卷积模块、6个c3模块、3个上采样模块以及6个拼接模块;
17、head目标检测头用于在特征图上预测目标类别并回归目标位置,包含4个detect检测器,即利用基于网格的anchor在不同尺度的特征图上进行目标检测;
18、所述卷积模块由卷积层、bn层和激活函数组成,通过卷积层提取输入特征中的局部空间信息,通过bn层网络归一化,所述激活函数使用leaky relu;
19、所述c3模块用于增加网络的深度和感受野,由三个卷积层构成,其中第一个卷积层的步长为2,用于将特征图的尺寸减半,第二个卷积层和第三个卷积层的步长为1;c3模块中采用的都是3x3的卷积核;
20、所述sppf是空间金字塔池化,用于将输入特征图转换成固定大小的特征向量;
21、所述上采样模块用于增加特征图尺寸;
22、所述拼接模块用于将两个或多个特征图在通道方向进行叠加。
23、其中,所述小网络模型的结构包括backbone、neck、head三部分;
24、所述backbone包含5个卷积模块、4个c3模块以及1个sppf模块;
25、所述neck包含4个卷积模块、4个c3模块、2个上采样模块以及4个拼接模块;
26、所述head目标检测头用于在特征图上预测目标类别并回归目标位置,包含3个detect检测器,即利用基于网格的anchor在不同尺度的特征图上进行目标检测。
27、其中,在所述步骤3中,所述裁剪及预处理具体包括如下子步骤:
28、子步骤1,在当前图像中,以上一帧图像中aed装置包围框的位置为中心,以包围框宽度的3-10倍为宽,以包围框高度的3-10倍为高进行裁剪,得到裁剪图像;
29、子步骤2,将裁剪图像的分辨率转换为640×640,得到小图像。
30、其中,在步骤4中,当小网络模型基于小图像,未能识别到aed装置时,重新执行步骤2,即再次通过大网络模型识别图像中的aed装置。
31、其中,在步骤2中,所述预处理是指将图像的分辨率转换为1280×1280。
32、其中,在步骤2中,大网络模型的输出结果为aed装置在图像坐标系相对位置;
33、在步骤4中,小网络模型的输出结果为aed装置在图像坐标系相对位置。
34、本发明所具有的有益效果包括:
35、(1)根据本发明提供的救援无人机自动识别抓取aed装置的控制方法中,在无人机上设置有两个网络模型,可以兼顾大网络模型的识别精度和小网络模型的识别速度,同时,小网络模型还能去除图像其他区域的干扰,进一步提高识别稳定性,识别效果更好;
36、(2)根据本发明提供的救援无人机自动识别抓取aed装置的控制方法中,对目标外接矩形区域图像进行自适应二值化,再对二值化后的图像拟合最小面积外接矩形,将该外接矩形的倾斜角度等价于aed装置的布置角度,由于aed装置被设置为长方体形状,该等价过程基本不会降低判断精度,该等价结果足够机械手执行抓取作业,通过设置该等价过程,极大地降低了无人机中关于布置角度的解算判断过程,减小运算量,降低无人机的投入成本;
37、(3)根据本发明提供的救援无人机自动识别抓取aed装置的控制方法中,仅处理目标外接矩形框拟合框内的图像,一方面减少了计算量,可以实时计算;同时,为自适应二值化去除了背景干扰,可以更好地得到物体的边缘;自适应二值化不需要对目标进行分割标注等工作,减少了人工成本,而且对目标颜色变化、环境光照变化等变化具有很高的鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!