基于机器人的打印方法、装置、电子设备及存储介质与流程
本申请涉及机器人,尤其涉及一种基于机器人的打印方法、装置、电子设备及存储介质。
背景技术:
1、目前在办公室工作,公司员工打印是一个问题,大部分公司都会在公司角落放置打印机来提供给员工使用,但是部分员工的工位距离打印机较远,因此,需要打印时就不太方便,而且来回走动也会影响其他员工办公,故由于目前打印自动化程度低,打印文件会占用员工较长的时间,从而影响员工的工作效率。
技术实现思路
1、本申请的主要目的在于提供一种基于机器人的打印方法、装置、电子设备及存储介质,旨在解决目前打印自动化程度低,影响员工的工作效率的技术问题。
2、为实现上述目的,本申请提供一种基于机器人的打印方法,所述机器人配置有打印组件,所述基于机器人的打印方法包括:
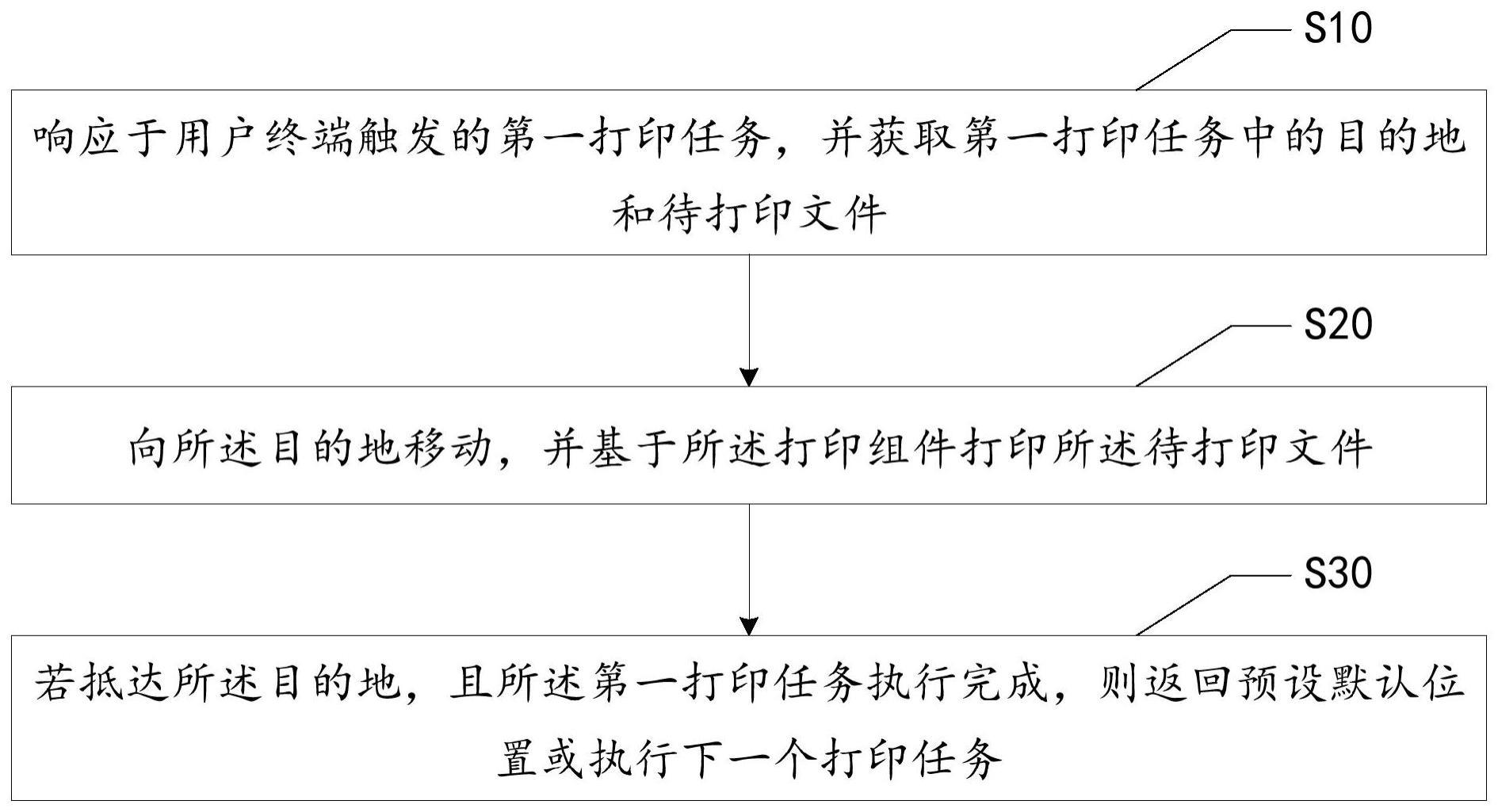
3、响应于用户终端触发的第一打印任务,并获取第一打印任务中的目的地和待打印文件;
4、向所述目的地移动,并基于所述打印组件打印所述待打印文件;
5、若抵达所述目的地,且所述第一打印任务执行完成,则返回预设默认位置或执行下一个打印任务。
6、可选地,所述基于机器人的打印方法还包括:
7、若在执行所述第一打印任务的过程中接收到第二打印任务,则将所述第二打印任务加入至第一待执行任务队列,更新所述第一待执行任务队列中各第二打印任务的优先级,其中,所述优先级用于在所述第一打印任务执行完成后确定所述下一个打印任务;
8、若在执行所述第一打印任务的过程中未接收到所述第二打印任务,且所述第一待执行任务队列存在多个第二打印任务,则在所述第一打印任务执行完成后,更新所述第一待执行任务队列中各第二打印任务的优先级,将所述第一待执行任务队列中优先级最高的第二打印任务作为所述下一个打印任务。
9、可选地,所述更新所述第一待执行任务队列中各第二打印任务的优先级的步骤包括:
10、对于所述第一待执行任务队列中任意一个第二打印任务,确定所述第二打印任务中的目的地与更新基准位置之间的距离以及所述第二打印任务的发布时刻,其中,所述更新基准位置为当前正在执行的打印任务中的目的地;
11、根据所述距离和所述发布时刻确定所述第二打印任务的优先级。
12、可选地,所述根据所述距离和所述发布时刻确定所述第二打印任务的优先级的步骤包括:
13、基于预设第一换算关系将所述距离换算为第一优先度,其中,所述第一优先度与所述距离成反比;
14、基于预设第二换算关系将所述发布时刻与当前时刻之间的时间跨度换算为第二优先度,其中,所述第二优先度与所述时间跨度成正比;
15、根据所述第一优先度与所述第二优先度的总和优先度确定所述优先级,其中,所述总和优先度与所述优先级成正比。
16、可选地,所述将所述第二打印任务加入至第一待执行任务队列的步骤包括:
17、判断自身状态是否满足所述第二打印任务的打印需求,其中,所述自身状态包括自身电量、自身墨水量和自身纸张量;
18、若满足打印需求,则将所述第二打印任务加入至第一待执行任务队列。
19、可选地,所述方法还包括:
20、若不满足打印需求,则向触发所述第二打印任务的用户终端反馈延迟打印的提示信息,并将所述第二打印任务加入到第二待执行任务队列,其中,所述第二待执行任务队列中的第二打印任务,在补充完电量、墨水或者纸张后,被添加至所述第一待执行任务队列。
21、可选地,所述基于机器人的打印方法还包括:
22、若检测到电量不足,则移动至第一预设默认位置,执行充电动作;或者,
23、若检测到墨水不足,则移动至第二预设默认位置,执行补充墨水动作;或者,
24、若检测到纸张不足,则移动至第三预设默认位置,执行补充纸张动作。
25、此外,为实现上述目的,本申请还提供一种基于机器人的打印装置,应用于机器人,所述机器人配置有打印组件,所述基于机器人的打印装置包括:
26、获取模块,用于响应于用户终端触发的第一打印任务,并获取第一打印任务中的目的地和待打印文件;
27、打印模块,用于向所述目的地移动,并基于所述打印组件打印所述待打印文件;
28、完成模块,用于若抵达所述目的地,且所述第一打印任务执行完成,则返回预设默认位置或执行下一个打印任务。
29、此外,为实现上述目的,本申请还提供一种电子设备,所述电子设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的基于机器人的打印程序,所述基于机器人的打印程序被所述处理器执行时实现上述的基于机器人的打印方法的步骤。
30、此外,为实现上述目的,本申请还提供一种存储介质,所述可储介质上存储有基于机器人的打印程序,所述基于机器人的打印程序被处理器执行时实现如上述的基于机器人的打印方法的步骤。
31、本申请实施例提出的一种基于机器人的打印方法、装置、电子设备及存储介质。在本申请实施例中,响应于用户终端触发的第一打印任务,并获取第一打印任务中的目的地和待打印文件;向所述目的地移动,并基于所述打印组件打印所述待打印文件;若抵达所述目的地,且所述第一打印任务执行完成,则返回预设默认位置或执行下一个打印任务。即本申请的机器人在执行用户终端触发产生的打印任务时,首先确定打印任务中的目的地和待打印文件,将待打印文件打印完成,并将完成的文件运送至目的地,使得用户无需走动即可完成文件的打印工作,并取得打印好的文件,从而减少用户打印所花费的时间,也避免影响其他员工工作,提高员工工作效率。
技术特征:
1.一种基于机器人的打印方法,其特征在于,应用于机器人,所述机器人配置有打印组件,所述基于机器人的打印方法包括:
2.如权利要求1所述的基于机器人的打印方法,其特征在于,所述基于机器人的打印方法还包括:
3.如权利要求2所述的基于机器人的打印方法,其特征在于,所述更新所述第一待执行任务队列中各第二打印任务的优先级的步骤包括:
4.如权利要求3所述的基于机器人的打印方法,其特征在于,所述根据所述距离和所述发布时刻确定所述第二打印任务的优先级的步骤包括:
5.如权利要求2所述的基于机器人的打印方法,其特征在于,所述将所述第二打印任务加入至第一待执行任务队列的步骤包括:
6.如权利要求5所述的基于机器人的打印方法,其特征在于,所述方法还包括:
7.如权利要求1至6任意一项所述的基于机器人的打印方法,其特征在于,所述基于机器人的打印方法还包括:
8.一种基于机器人的打印装置,应用于机器人,所述机器人配置有打印组件,所述基于机器人的打印装置包括:
9.一种电子设备,其特征在于,所述电子设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的基于机器人的打印程序,所述基于机器人的打印程序被所述处理器执行时实现如权利要求1至7中任一项所述的基于机器人的打印方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有基于机器人的打印程序,所述基于机器人的打印程序被处理器执行时实现如权利要求1至7中任一项所述的基于机器人的打印方法的步骤。
技术总结
本申请公开了一种基于机器人的打印方法、装置、电子设备及存储介质,涉及机器人领域,方法包括:响应于用户终端触发的第一打印任务,并获取第一打印任务中的目的地和待打印文件;向目的地移动,并基于打印组件打印待打印文件;若抵达目的地,且第一打印任务执行完成,则返回预设默认位置或执行下一个打印任务。即本申请中机器人在执行用户终端触发产生的打印任务时,首先确定打印任务中的目的地和待打印文件,将待打印文件打印完成,并将完成的文件运送至目的地,使得用户无需走动即可完成文件的打印工作,并取得打印好的文件,从而减少用户打印所花费的时间,也避免影响其他员工工作,提高员工工作效率。
技术研发人员:刘大志,肖峰
受保护的技术使用者:深圳优地科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!