一种基于时间序列智能平滑的高速机动目标跟踪误差补偿方法
本发明涉及目标跟踪领域,特别是涉及一种基于时间序列智能平滑的高速机动目标跟踪误差补偿方法。适用于巡航导弹、无人机、超音速飞机等航迹平滑变化的高速机动目标。
背景技术:
1、目标跟踪作为军事和民用方面不可或缺的一种技术,一直都有国内外各界研究者对其进行广泛而深入的研究,并提出了大量的跟踪理论与方法。但现阶段目标跟踪方法大多基于状态空间模型,严重依赖于目标运动的精确先验信息,但在实际的目标跟踪任务中,特别是在军事领域,由于空战、隐身、突防等原因,目标发生随机未知的机动进一步增加了跟踪的难度,经典的模型驱动跟踪方法可能会由于不准确的先验知识和复杂的现实系统模型而迅速恶化。因此,模型驱动的目标跟踪算法在满足实际应用和需求方面面临越来越多的挑战。
2、文献“joint smoothing and tracking based on continuous-time targettrajectory function fitting”首次提出连续时间轨迹函数(trajectory function oftime,tfot)并证明其应用于目标跟踪方面的有效性。该方法利用一条连续的函数来表示目标的运动轨迹,提高了目标跟踪精度并减少了计算时间。但基于曲线拟合的核心思路受观测噪声和量测采样频率的限制,较大的观测噪声会降低时间轨迹函数的拟合精度,较低的量测采样率下难以准确捕捉连续时序特征。针对上述问题,如何降低过度偏离真实航迹的较大噪声量测影响和精确填补相邻采样间隔间的目标航迹是本发明的主要出发点。
技术实现思路
1、本发明所要解决的技术问题是:
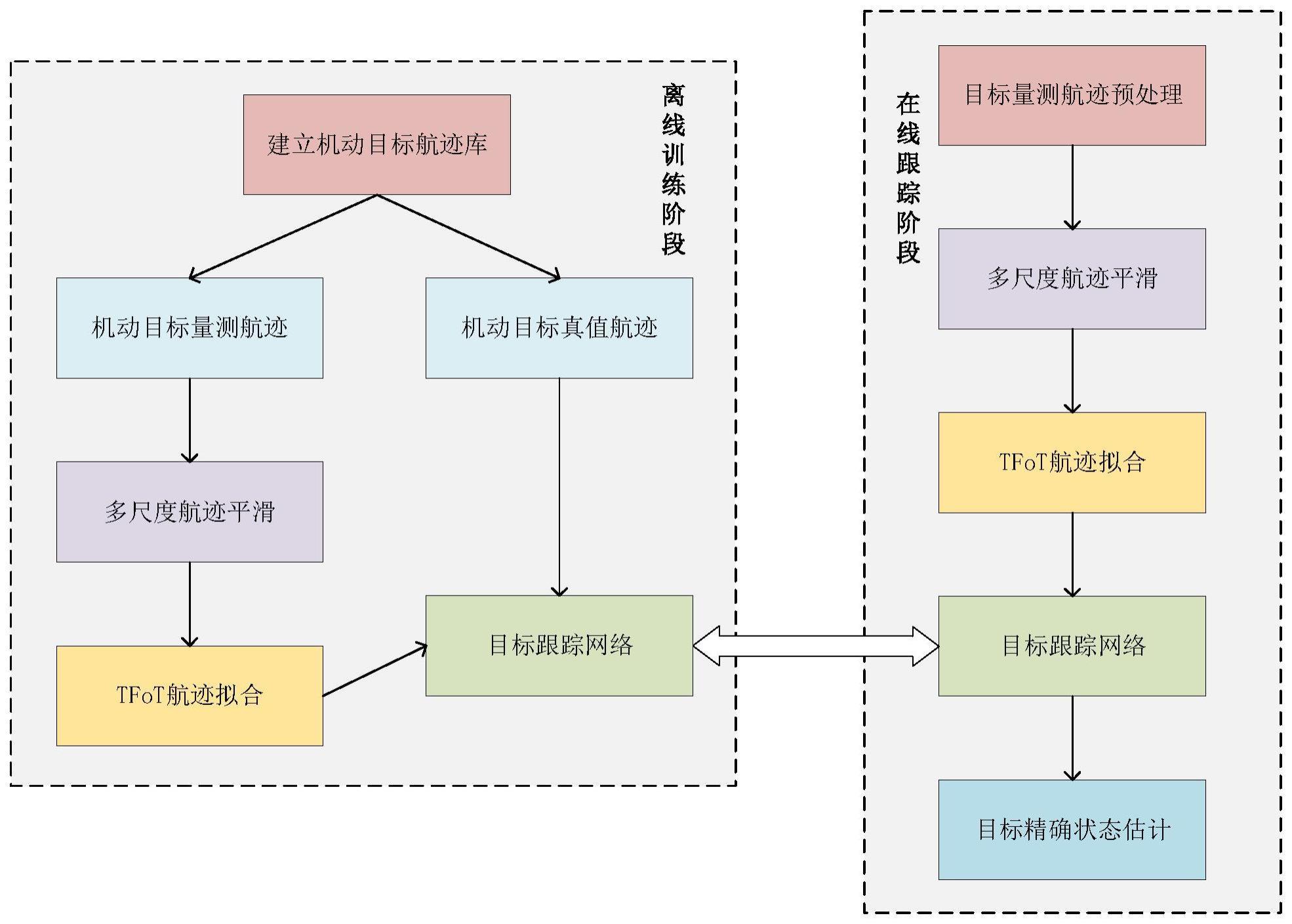
2、针对现有经典方法严重依赖于目标运动的精确先验知识和tfot受限于观测噪声和采样率限制的问题,本发明提出一种基于时间序列智能平滑的高速机动目标跟踪误差补偿方法。使用多尺度平滑模块和神经网络对tfot目标跟踪方法进行进一步修正以利用纯量测信息来得到机动目标在当前时刻的精确状态估计。该方法适用于解决复杂机动场景下的机动目标跟踪问题。
3、为了解决上述技术问题,本发明采用的技术方案为:
4、一种基于时间序列智能平滑的高速机动目标跟踪误差补偿方法,其特征在于包括:
5、建立机动目标运动模型与量测模型分别获取机动目标的真值航迹和量测航迹;
6、设计多尺度移动平均模块对量测航迹进行平滑处理;
7、基于连续时间轨迹函数目标跟踪方法拟合量测航迹;
8、构建神经网络,将平滑和拟合后的量测航迹作为神经网络的输入,将真值航迹作为神经网络的输出;将真值航迹和量测航迹组成训练数据,采用训练数据对神经网络进行训练;所述的神经网络为transformer网络,包括输入模块、编码器、解码器和输出模块;所述编码器包括多头自注意力、前馈神经网络;所述解码器包括维度调整全连接网络、双向lstm网络;
9、采用训练好的神经网络对量测航迹进行实时预测并进行航迹拼接。
10、本发明进一步的技术方案:所述的真值航迹和量测航迹包括匀速直线运动cv、匀速圆周运动ct和匀加速直线运动ca三种运动模型航迹库并将其随机组合来模拟真实机动目标航迹。
11、本发明进一步的技术方案:所述机动目标运动模型与量测模型分别为:
12、x(k)=fx(k-1)+w(k)
13、z(k)=hx(k)+v(x)
14、式中,x(k)表示k时刻的目标状态;f是状态转移矩阵,表征状态从前一时刻转换到当前时刻的变换;w(k)表示系统误差(噪声);z(k)表示k时刻的目标量测;h表示量测变换矩阵;v(k)表示测量误差(噪声),系统误差和量测误差为相互独立的高斯噪声。
15、本发明进一步的技术方案:所述多尺度移动平均模块具体为:
16、
17、
18、式中,z′1:k为观测航迹状态;为平滑处理后的航迹状态;padding(·)表示填充操作以保持序列长度不变;average(·)表示移动平均操作;c1,c2表示加权系数;kernel_size1,kernel_size2表示不同尺度的平滑窗口大小;padding表示为保证序列长度不变的填充大小。
19、本发明进一步的技术方案:还包括对神经网络输入和输出标签进行归一化处理:
20、
21、式中,表示k个时刻的tfot拟合航迹;x1:k表示对应k个时刻的真值航迹,zmin,zmax分别表示量测航迹中的最小值和最大值,x′1:k分别表示归一化处理后的tfot拟合航迹状态和真值状态,并分别作为神经网络的输入和输出标签。
22、本发明进一步的技术方案:所述transformer网络的处理过程包括:
23、对输入序列进行位置编码和序列编码;
24、使用多头自注意力机制捕捉序列元素之间的依赖关系来对目标航迹全局建模;
25、在编码器子模块中加入残差连接和层归一化改善网络并通过前馈神经网络增强模型的表达能力;
26、通过维度调整全连接网络和双向lstm组成的解码器进一步获取目标状态的精确估计。
27、本发明进一步的技术方案:所述对量测航迹进行实时预测并进行航迹拼接:
28、
29、
30、式中,model(·)表示训练好的神经网络模型;z′1:k表示网络输入的预处理量测航迹状态;表示经过网络输出的真值状态估计;x1:n表示已有的前n个采样时刻的状态估计;x1:n+1表示将最新采样时刻的状态估计更新至总航迹状态估计中;表示神经网络对第k个采样时刻的状态估计。
31、一种基于时间序列智能平滑的高速机动目标跟踪误差补偿方法的验证方法,其特征在于:以均方根误差rmse为比较指标,定义t时刻目标位置rmse为:
32、
33、式中,xt和yt是传感器量测位置,和是神经网络输出的位置估计。
34、一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现上述的方法。
35、一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现上述的方法。
36、本发明的有益效果在于:
37、本发明提供的一种基于时间序列智能平滑的高速机动目标跟踪误差补偿方法,该方法旨在基于tfot目标跟踪方法通过设计的多尺度航迹平滑模块和transformer神经网络时序预测进一步获取目标状态的精确估计。通过上述方式,本发明能够对机动目标实现更高精度的实时跟踪,其利用多尺度航迹平滑模块能够显著消除噪声对运动轨迹拟合的影响,同时借助transformer的自注意力机制提取观测序列的全局特征来实现tfot目标跟踪方法对机动目标状态的精确估计。该方法能够对复杂机动场景下目标实现更高精度的实时跟踪,突破先验缺失下的目标航迹更新技术瓶颈。
- 还没有人留言评论。精彩留言会获得点赞!