一种智能驾驶车辆性能的测试场景生成方法及系统
本发明涉及智能驾驶测试,尤其是涉及一种智能驾驶车辆性能的测试场景生成方法及系统。
背景技术:
1、随着智能驾驶技术的提高,搭载有智能驾驶系统的汽车在交通环境中的占有比例逐渐升高。在智能驾驶车辆规模化应用之前,如何利用测试场景去测试评价车辆的安全性是当今关注的重点。由于在基于开放性道路测试的过程中,出现复杂交通碰撞事故的场景较少,因此目前基于真实复杂多变的交通碰撞场景,设计出相应的具有危险性、对智能驾驶系统具有挑战性的测试场景的研究尤为重要。
2、目前业界普遍公认的测试智能驾驶系统的方法是基于场景的测试评价体系,以场景为基础,构建包括有虚拟仿真测试、封闭场地测试及真实道路测试的综合评价体系。虚拟仿真测试方法是通过上位机对真实交通场景进行复现,场景的可操作性强、可以进行遍历测试、节约人员与时间的成本,但其缺点是场景真实度较低,无法完全验证智能驾驶系统的性能;封闭场地测试是最接近于实际开放道路测试的,具有可操作性强、测试效率相对较高、场景真实度高、时间成本低等优点;真实道路测试理论上是测试智能驾驶系统的最佳方式,但是其测试时间成本巨大、可操作性低。
3、在测试场景方面,目前基于场景的测试方法是国际社会与汽车行业在测试智能驾驶汽车方面普遍认可的一种测试方法。国外对于智能驾驶系统测试场景的研究起步较早、相对深入,涵盖了场景生成、场景覆盖度等方面。国内面向于智能驾驶系统测试场景的研究仍处于起步阶段,大多数研究集中于虚拟仿真测试场景的生成方法,针对于封闭场地测试的测试场景研究较少。测试场景设计的数据来源大多数来自于实际道路经常会出现的自然驾驶数据以及典型场景,然而在真实道路自然驾驶的环境中能出现具有潜在交通碰撞风险的驾驶情况概率较小,所以对于自然驾驶数据以外的具有潜在交通碰撞风险的驾驶数据较少,针对于测试智能驾驶系统安全性的碰撞危险性测试场景研究较少。危险性场景对于智能驾驶汽车的安全性挑战巨大,通过测试碰撞危险性场景的智能驾驶车辆可最大限度的评估其安全性能。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种智能驾驶车辆性能的测试场景生成方法及系统。
2、本发明的目的可以通过以下技术方案来实现:
3、根据本发明的第一方面,提供一种智能驾驶车辆性能的测试场景生成方法,包括:
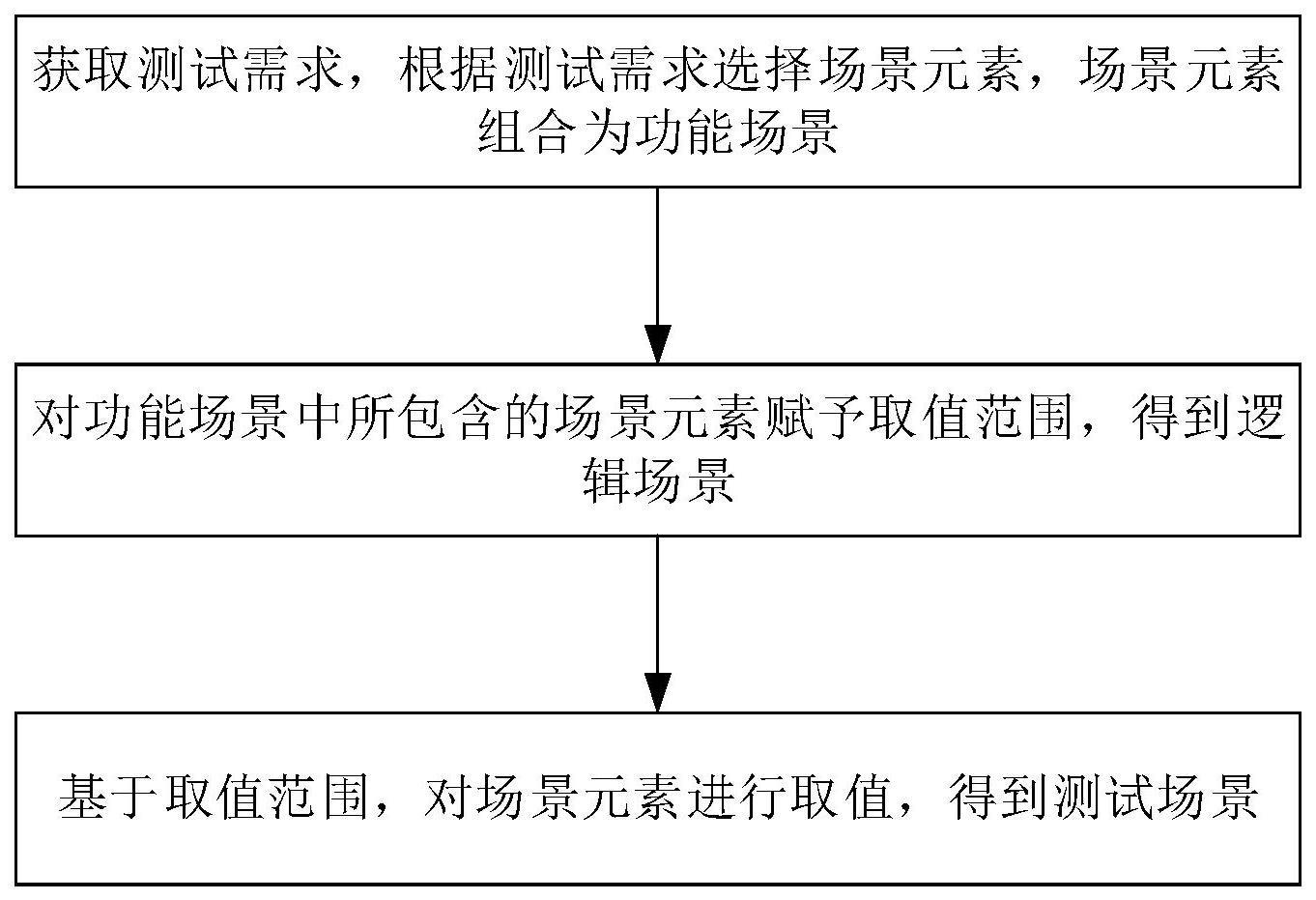
4、获取测试需求,根据所述测试需求选择场景元素,场景元素组合为功能场景;
5、对功能场景中所包含的场景元素赋予取值范围,得到逻辑场景;
6、基于取值范围,对场景元素进行取值,得到测试场景。
7、进一步地,所述功能场景的类型包括:目标车紧急制动、目标车变道切入、直道横穿和十字路口穿行。
8、进一步地,间隔性或者随机性的对场景元素进行取值,得到测试场景。
9、进一步地,所述场景元素包括自车车速、目标车车速、相对距离。
10、进一步地,所述目标车紧急制动具体为:自车与目标车处于同一车道,在双方到达设定速度以及相对距离内,目标车进行制动。
11、进一步地,所述目标车变道切入具体为:自车与目标车处于相邻车道,在双方到达设定速度以及相对距离内,此时目标车突然变道至自车车道。
12、进一步地,所述直道横穿具体为:自车运动朝向与目标车的运动朝向夹角呈90度,在双方到达设定速度以及相对距离内,目标车保持直行匀速状态。
13、进一步地,所述十字路口穿行具体为:自车在十字路口进行直行、左转弯、或右转弯时,遇到对向车道目标车直行、左转弯、右转弯以及人行道内的目标物横穿,在双方到达设定速度与相对距离后,目标车保持原有的运动状态。
14、根据本发明的第二方面,提供一种智能驾驶车辆性能的测试场景生成系统,包括:
15、筛选模块,获取测试需求,根据所述测试需求选择场景元素,场景元素组合为功能场景;
16、赋值模块,对功能场景中所包含的场景元素赋予取值范围,得到逻辑场景;
17、取值模块,基于取值范围,对场景元素进行取值,得到测试场景。
18、进一步地,所述功能场景的类型包括:目标车紧急制动、目标车变道切入、直道横穿和十字路口穿行。
19、与现有技术相比,本发明具有以下有益效果:
20、通过组合场景元素生成功能场景,再确定参数取值范围,通过确定场景元素的取值得到测试场景,可有效解决现有测试技术对于测试智能驾驶汽车性能不全面,测试场景真实度低,覆盖度小,测试成本高等问题。
技术特征:
1.一种智能驾驶车辆性能的测试场景生成方法,其特征在于,包括:
2.根据权利要求1所述的一种智能驾驶车辆性能的测试场景生成方法,其特征在于,所述功能场景的类型包括:目标车紧急制动、目标车变道切入、直道横穿和十字路口穿行。
3.根据权利要求1所述的一种智能驾驶车辆性能的测试场景生成方法,其特征在于,间隔性或者随机性的对场景元素进行取值,得到测试场景。
4.根据权利要求1所述的一种智能驾驶车辆性能的测试场景生成方法,其特征在于,所述场景元素包括自车车速、目标车车速、相对距离。
5.根据权利要求2所述的一种智能驾驶车辆性能的测试场景生成方法,其特征在于,所述目标车紧急制动具体为:自车与目标车处于同一车道,在双方到达设定速度以及相对距离内,目标车进行制动。
6.根据权利要求2所述的一种智能驾驶车辆性能的测试场景生成方法,其特征在于,所述目标车变道切入具体为:自车与目标车处于相邻车道,在双方到达设定速度以及相对距离内,此时目标车突然变道至自车车道。
7.根据权利要求2所述的一种智能驾驶车辆性能的测试场景生成方法,其特征在于,所述直道横穿具体为:自车运动朝向与目标车的运动朝向夹角呈90度,在双方到达设定速度以及相对距离内,目标车保持直行匀速状态。
8.根据权利要求2所述的一种智能驾驶车辆性能的测试场景生成方法,其特征在于,所述十字路口穿行具体为:自车在十字路口进行直行、左转弯、或右转弯时,遇到对向车道目标车直行、左转弯、右转弯以及人行道内的目标物横穿,在双方到达设定速度与相对距离后,目标车保持原有的运动状态。
9.一种智能驾驶车辆性能的测试场景生成系统,其特征在于,基于如权利要求1-8中任一所述的测试场景生成方法,包括:
10.根据权利要求9所述的一种智能驾驶车辆性能的测试场景生成系统,其特征在于,所述功能场景的类型包括:目标车紧急制动、目标车变道切入、直道横穿和十字路口穿行。
技术总结
本发明涉及一种智能驾驶车辆性能的测试场景生成方法及系统,方法包括:获取测试需求,根据测试需求选择场景元素,场景元素组合为功能场景;对功能场景中所包含的场景元素赋予取值范围,得到逻辑场景;基于取值范围,对场景元素进行取值,得到测试场景。与现有技术相比,本发明通过组合场景元素生成功能场景,再确定参数取值范围,通过确定场景元素的取值得到测试场景,可有效解决现有测试技术对于测试智能驾驶汽车性能不全面,测试场景真实度低,覆盖度小,测试成本高等问题。
技术研发人员:吴长水,王银亭
受保护的技术使用者:上海工程技术大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!