一种基于数据处理的VR交互设备控制方法及系统
本发明属于vr设备管理,具体涉及一种基于数据处理的vr交互设备控制方法及系统。
背景技术:
1、vr设备是利用仿真技术与计算机图形学、人机接口技术、多媒体技术、传感技术和网络技术等多种技术集合的产品,能够借助计算机及传感器实现人机交互。目前,现有vr设备在实现人机交互的控制过程中,对用户的姿态识别和手势的识别精准度有待提高,容易出现误操作,导致给人机交互信号的输入带来不便。
技术实现思路
1、本发明为了解决上述问题,提出了一种基于数据处理的vr交互设备控制方法及系统。
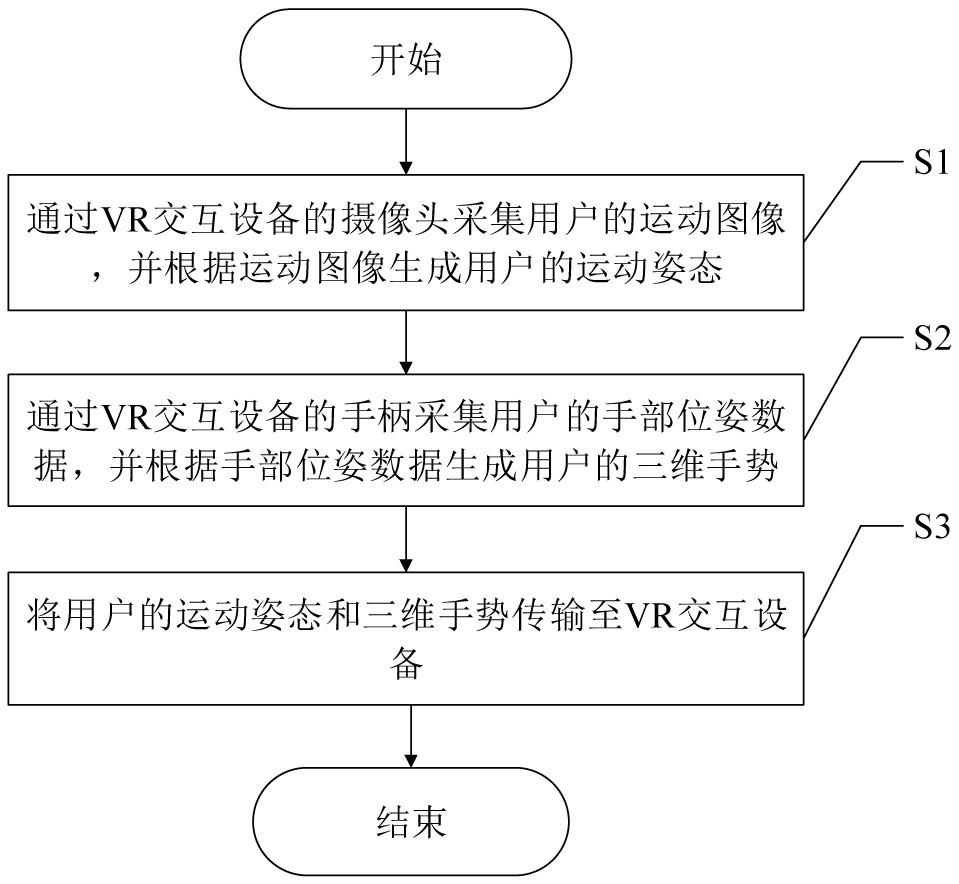
2、本发明的技术方案是:一种基于数据处理的vr交互设备控制方法包括以下步骤:
3、s1、通过vr交互设备的摄像头采集用户的运动图像,并根据运动图像生成用户的运动姿态;
4、s2、通过vr交互设备的手柄采集用户的手部位姿数据,并根据手部位姿数据生成用户的三维手势;
5、s3、将用户的运动姿态和三维手势传输至vr交互设备;
6、s1包括以下子步骤:
7、s11、通过vr交互设备的摄像头采集用户的运动图像,对运动图像进行裁剪,确定运动图像的运动区域,生成局部运动图像;
8、s12、提取局部运动图像中用户的肢体活动区域,生成肢体运动图像;
9、s13、提取肢体运动图像的边缘轮廓;
10、s14、根据肢体运动图像的边缘轮廓,生成用户的运动姿态。
11、本发明的有益效果是:
12、(1)该vr交互设备控制方法通过对用户的运动图像进行逐步裁剪,精准地确定肢体活动区域,再根据肢体活动区域生成边缘轮廓,基于边缘轮廓即可得到用户的运动姿态,整个过程可以减少用户所处背景带来的干扰,提高姿态识别精准度;
13、(2)该vr交互设备控制方法通过采集手部位姿数据,利用不同时刻的手部位姿数据对应的高斯混合模型进行修正,使构建的模型更适用于当前用户,且通过构建运动方程确定手势,从而准确地反映用户需求;生成的位姿和手势传输至vr交互设备,便于实现人机交互,提高用户体验。
14、进一步地,s11中,对运动图像进行裁剪的具体方法为:设定像素特征阈值,利用滑动窗口在运动图像上滑动,得到若干个图像块;计算各个图像块的像素特征值,将像素特征值小于像素特征阈值的图像块剔除,将剩余图像块作为运动图像的运动区域,生成局部图像;
15、进一步地,图像块的像素特征值 σ的计算公式为:;式中, v max表示运动图像的最大亮度值, v min表示运动图像的最小亮度值, v k表示图像块中第 k个像素点的亮度值, k表示图像块的像素点个数, s表示图像块的面积。
16、进一步地,s12中,生成肢体运动图像的具体方法为:利用k-means聚类算法对局部运动图像进行聚类处理,得到各个像素点与初始聚类中心之间的相似度,根据相似度小于0.5的所有像素点生成最大连通区域,将运动图像的运动区域与最大连通区域的差值作为肢体活动区域,生成肢体运动图像。
17、进一步地,s13中,提取肢体运动图像的边缘轮廓的具体方法为:提取肢体运动图像中各个图像块的局部轮廓,将所有图像块的局部轮廓连接作为提取肢体运动图像的边缘轮廓。
18、进一步地,s2包括以下子步骤:
19、s21、通过vr交互设备的手柄采集用户当前时刻的手部位姿数据,并构建当前时刻的手部高斯混合模型;
20、s22、根据上一时刻的手部位姿数据和下一时刻的手部位姿数据,对手部高斯混合模型进行迭代修正;
21、s23、利用迭代修正后的手部高斯混合模型,分别确定当前时刻的关节运动方程和手掌运动方程;
22、s24、根据当前时刻的关节运动方程和手掌运动方程,确定用户的三维手势。
23、进一步地,s22中,迭代修正后的手部高斯混合模型 f的表达式为:;式中, a n+1表示下一时刻的手掌运动加速度, a n-1表示上一时刻的手掌运动加速度, b n+1表示下一时刻的关节运动加速度, b n-1表示上一时刻的关节运动加速度, f(·)表示概率密度函数, y t表示当前时刻的手部位姿数据集合, μ n表示当前时刻的手部高斯混合模型均值, δ n表示当前时刻的手部高斯混合模型协方差。
24、手部位姿数据包括手掌部分的位姿数据和关节部分的位姿数据,所以手部高斯混合模型均值指手掌部分的子高斯混合模型和与关节部分的子高斯混合模型之间的均值,手部高斯混合模型协方差指手掌部分的子高斯混合模型和与关节部分的子高斯混合模型之间的协方差。
25、进一步地,s23中,当前时刻的手掌运动方程 a的表达式为:;式中, ε表示常数, c n+1表示下一时刻的手掌运动速度, c n表示当前时刻的手掌运动速度, c n-1表示上一时刻的手掌运动速度, t1表示下一时刻与当前时刻之间的时长, t2表示当前时刻与上一时刻之间的时长, f表示迭代修正后的手部高斯混合模型。
26、进一步地,s23中,当前时刻的关节运动方程 b的表达式为:;式中, ε表示常数, d n+1表示下一时刻的关节运动速度, d n表示当前时刻的关节运动速度, d n-1表示上一时刻的关节运动速度, t1表示下一时刻与当前时刻之间的时长, t2表示当前时刻与上一时刻之间的时长, f表示迭代修正后的手部高斯混合模型。
27、基于以上方法,本发明还提出一种基于数据处理的vr交互设备控制系统,包括运动姿态生成单元、三维手势生成单元和终端传输单元;
28、运动姿态生成单元用于通过vr交互设备的摄像头采集用户的运动图像,并根据运动图像生成用户的运动姿态;
29、三维手势生成单元用于通过vr交互设备的手柄采集用户的手部位姿数据,并根据手部位姿数据生成用户的三维手势;
30、终端传输单元用于将用户的运动姿态和三维手势传输至vr交互设备。
31、本发明的有益效果是:该vr交互设备控制系统可以为用户生成准确的姿态和手势,便于实现人机交互,提高用户体验。
- 还没有人留言评论。精彩留言会获得点赞!