一种基于轻量级网络的高效雷达图像目标识别方法
本发明属于目标识别,特别涉及一种基于轻量级网络的高效雷达图像目标识别方法。
背景技术:
1、成像雷达在民用和军事应用中具有重要意义,因为它能够全天提供高分辨率、不受天气影响的图像。雷达图像目标识别是其中一项极富挑战性的重要应用。随着近年来深度学习的飞速发展,现已提出了各种基于深度学习的识别方法。然而,这些方法总是要求每个目标类型包含足够多的标记训练样本才能达到良好的性能。但在现实应用中,由于雷达图像的获取成本很高,特别是在地震救援和海上救援中,可用的雷达图像数量可能很少。因此学者们也开展了一系列针对小样本下雷达图像目标识别问题的研究,例如,文献“c.cao,z.cao,and z.cui,ldgan:a synthetic aperture radar image generation method forautomatic target recognition,ieee transactions on geoscience and remotesensing,vol.58,no.5,pp.3495-3508,2019.”开发了一种基于推土机距离(earth mover’sdistance,emd)的标签定向生成对抗网络,生成了更真实的目标图像,以帮助提高在数据短缺的情况下的识别性能。
2、尽管上述研究在极其有限的训练图像下显示出良好的潜力,但在现实应用中,除了识别效果考虑外,实时性也是一个主要问题。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种将轻量级网络应用于雷达图像目标识别来提升网络实时性,保持非常小的网络复杂度即可获得很好的实时性的一种基于轻量级网络的高效雷达图像目标识别方法。
2、本发明的目的是通过以下技术方案来实现的:一种基于轻量级网络的高效雷达图像目标识别方法,包括以下步骤:
3、步骤一、引入mobilenetv3轻量级网络:采用mobilenetv3-large网络,mobilenetv3-large网络依次包括标准卷积层、15个核心瓶颈结构bneck和三个逐点卷积层,以及位于第一个逐点卷积层和第二个逐点卷积层之间的平均池化层;由标准卷积层对目标的雷达图像进行初步的特征图提取,然后由15个核心瓶颈结构bneck进一步提取鉴别性更强的高维特征,最后由逐点卷积层处理高维特征并得到最终的类别预测结果;
4、15个核心瓶颈结构bneck中,第4、5、6、11、12、13、14、15个核心瓶颈结构bneck中含有se模块,其余核心瓶颈结构bneck中不含se模块;
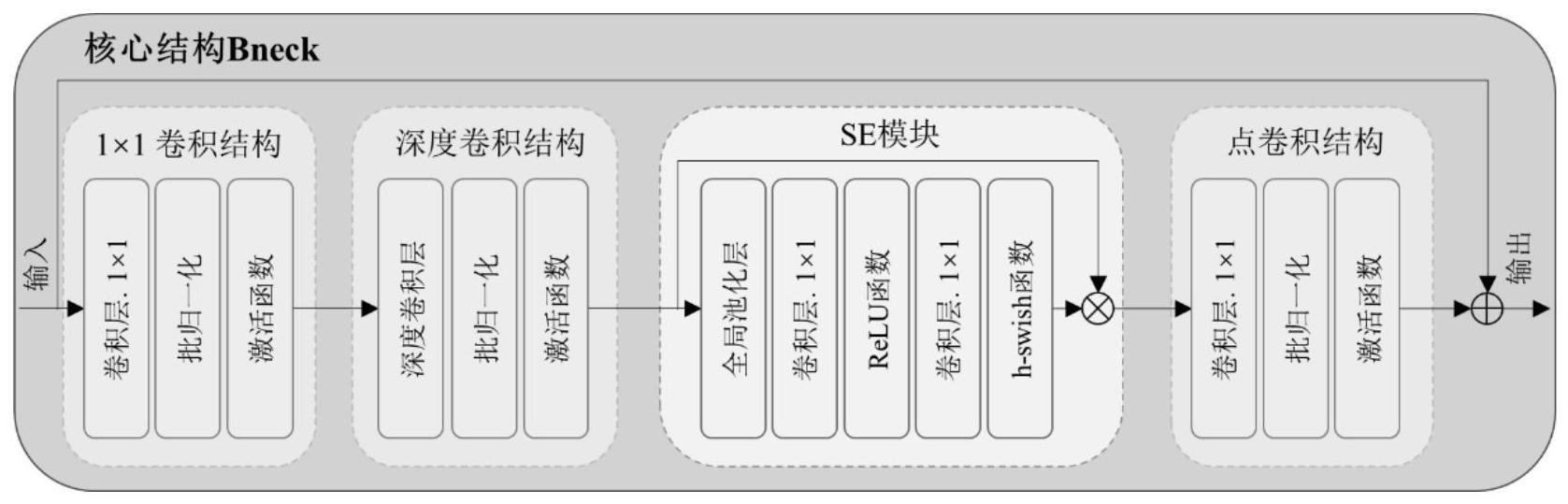
5、含有se模块的核心瓶颈结构bneck包括顺连的1×1卷积结构、深度卷积结构、se模块和点卷积结构;其中,1×1卷积结构、深度卷积结构和点卷积结构用于构建倒残差结构,即利用1×1卷积结构对输入特征图进行通道扩张,然后使用深度卷积结构进行特征提取,最后使用点卷积结构将通道数压缩回去;
6、不含se模块的核心瓶颈结构bneck包括顺连的1×1卷积结构、深度卷积结构和点卷积结构;
7、se模块由一个全局平均池化层和两个具有相应激活函数的全连接层组成,且se模块中第一个全连通层的节点数被设置输入特征矩阵通道的1/4;全连接操作是使用1×1卷积来实现的;se模块首先将输入矩阵的每个通道池化,得到一维向量,然后通过两个全连接层,得到每个通道的权值;最后,将输入矩阵与通道权重相乘得到最终输出;
8、第一个全连接层采用relu激活函数;第二个全连接层采用h-swish激活函数;
9、步骤二、获取雷达图像目标数据集以及待测目标的雷达图像,并将其整理为训练集和测试集:将获取得到的所有目标的雷达图像切片调整为统一尺寸;然后,将包含对应的类别标签的已知目标的雷达图像整理作为训练集,而待测目标的雷达图像作为测试集图像;
10、步骤三、将训练集直接输入mobilenetv3-large网络进行训练,进行标签预测的识别学习,通过反向传播和优化,得到训练好的识别网络,并以训练好的识别网络来完成待测目标雷达图像类别标签的实时识别预测。
11、本发明的有益效果是:本发明考虑到雷达图像目标识别实际应用中准确率和实时性的重要性,将轻量级网络应用于雷达图像目标识别来提升网络实时性。实验证明,本发明在mstar数据集上展现了优异的小样本识别性能的同时,保持了非常小的网络复杂度,即可获得很好的实时性。因此,本发明在高效雷达图像目标识别上具有很大的应用潜力。
技术特征:
1.一种基于轻量级网络的高效雷达图像目标识别方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种基于轻量级网络的高效雷达图像目标识别方法,包括以下步骤:步骤一、采用MobileNetV3‑Large网络,依次包括标准卷积层、15个核心瓶颈结构Bneck和三个逐点卷积层,以及位于第一个逐点卷积层和第二个逐点卷积层之间的平均池化层;步骤二、获取雷达图像目标数据集以及待测目标雷达图像,并将其整理为训练集和测试集;步骤三、将训练集直接输入MobileNetV3‑Large网络进行训练。本发明将轻量级网络应用于雷达图像目标识别来提升网络实时性,在MSTAR数据集上展现了优异的小样本识别性能的同时,保持了非常小的网络复杂度,即可获得很好的实时性,在高效雷达图像目标识别上具有很大的应用潜力。
技术研发人员:杨建宇,黄钰林,王陈炜,裴季方,罗思懿,张寅,霍伟博,杨海光,张永超
受保护的技术使用者:电子科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!