一种改变无量纲横流系数的Norrbin模型船舶预测方法
本发明属于水面船舶在不同海况下的运动控制,具体而言,尤其涉及一种改变无量纲横流系数的norrbin模型船舶预测方法,属于船舶运动控制。
背景技术:
1、船舶旋回性受水域、气象、水文条件等诸多因素影响,根据imo的要求,旋回试验时风力不超过蒲氏5级,海浪不超过4级,流速、流向相对稳定。虽然在海上试航时要求的试验海况比较严格,但是风、浪和流等自然因素对船舶的旋回性有一定的影响,驾驶人员需要掌握船舶在操船海况下的旋回性能,或者根据无风流的旋回性能估算操船海况下的旋回性能,因此根据船舶旋回试验结果预报船舶在无风流及限定海况中的旋回性能工作是十分必要的。
2、目前已有一些可行的研究方法,如专利cn202211398481.7中公开了一种船舶运动模型参数智能灰箱辨识方法、船舶运动控制方法,方法包括以下步骤:其中的辨识方法将建立的船舶操纵响应模型作为待辨识的生成器,其将随机变量输入生成器产生模拟数据;能够根据输入改变对应的船舶机理模型;一组服从高斯噪声分布的随机序列z经生成器后输出一组离散的模拟数据;判别器对模拟数据与真实数据进行判别训练,对生成器进行更新,达到参数辨识的目的。本发明中的一种船舶运动模型参数智能灰箱辨识方法,为船舶的非线性动力学模型辨识提供了有效的途径,辨识精度较高,收敛速度更快,且在较少的数据量情况下能达到更高的精度,为解决船舶这类非线性特性明显、运动状态复杂的运动辨识建模问题提供了一种有效智能新思路等等。
3、当前对模型的改进,大部分都是通过等比例放大流体动力导数实现的,有时仅靠调节流体动力导数的放大倍数会导致仿真实验结果与实船旋回轨迹的符合度较低,对船舶旋回性能的预测较差。船舶预测问题并没有彻底解决,预测有时得到的结果符合度较低。
技术实现思路
1、为了解决针对调节船舶流体动力导数有时与实船轨迹符合度较低,进而导致对船舶的旋回性能预测较差的问题,本发明采用的技术方案是:
2、一种改变无量纲横流系数的norrbin模型船舶预测方法,其特征在于:包括如下步骤:
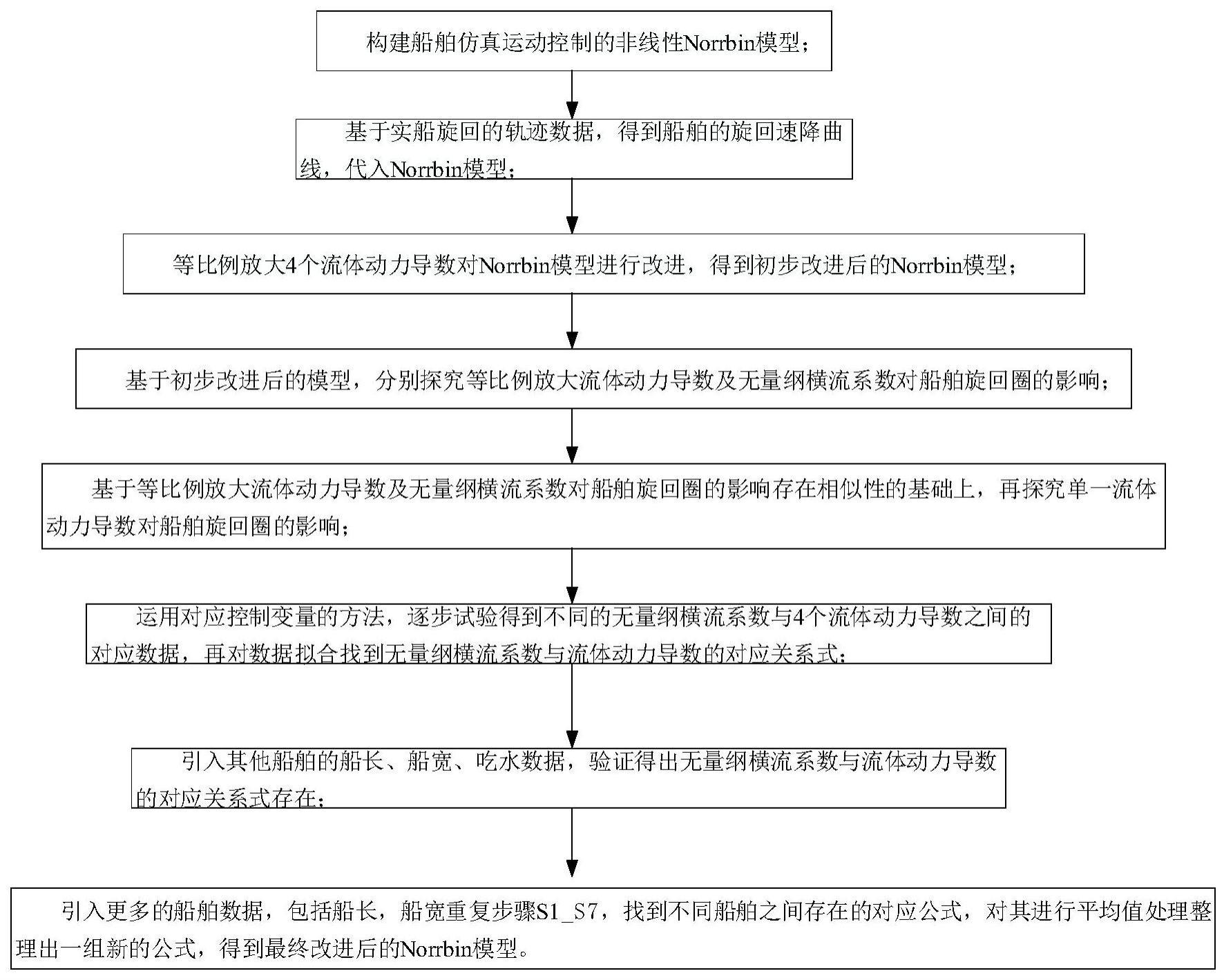
3、s1:构建船舶仿真运动控制的非线性norrbin模型;
4、s2:基于实船旋回的轨迹数据,得到船舶的旋回速降曲线,代入norrbin模型;
5、s3:等比例放大4个流体动力导数对norrbin模型进行改进,得到初步改进后的norrbin模型;
6、s4:基于初步改进后的模型,分别探究等比例放大流体动力导数及无量纲横流系数对船舶旋回圈的影响;
7、s5:基于等比例放大流体动力导数及无量纲横流系数对船舶旋回圈的影响存在相似性的基础上,再探究单一流体动力导数对船舶旋回圈的影响;
8、s6:运用对应控制变量的方法,逐步试验得到不同的无量纲横流系数与4个流体动力导数之间的对应数据,再对数据拟合找到无量纲横流系数与流体动力导数的对应关系式;
9、s7:引入其他船舶的船长、船宽、吃水数据,验证得出无量纲横流系数与流体动力导数的对应关系式存在;
10、s8:引入更多的船舶数据,包括船长,船宽数据,重复步骤s1——s7,找到不同船舶之间存在的对应公式,对其进行平均值处理整理出一组新的公式,得到最终改进后的norrbin模型。
11、进一步地,所述构建船舶仿真运动控制的非线性norrbin模型如下:
12、
13、
14、在式(1)和(2)中,上标“'”为无量次化,m'表示m与因子pl3/2的比值,x'c表示xc与l的比值,i'zz为izz与pl5/2的比值,v为纵向速度,v为横向速度,r为转向速度,x(2)为状态向量,u为控制输入;
15、式(2)中的l,b,t,cb,aδ分别指船舶的两柱间长、船宽、吃水、方形系数、舵叶面积。y'r,n'r则是船体本身的流体动力导数,在实际应用中应该考虑舵本身对船所受流体动力的干扰,故还应对流体动力导数进行修正,需要修正的变量按式(3)确定;
16、
17、式(3)中i'(2),p'(2),q'(2)分别为惯性力导数矩阵,粘性力导数矩阵及舵力导数矩阵,其回归公式如式(4)所示:
18、
19、非线性流体力的简洁表达式见式(5):
20、
21、式中fy(v,r)和fn(v,r)的表达式见式(6)和式(7):
22、
23、
24、上式中cr为无量纲横流系数,其数值通常在0.3~0.8范围内。
25、进一步地,所述构建船舶仿真运动控制的非线性norrbin模型对风浪流的干扰处理如下:
26、s11、风的干扰:
27、风力y'wind,n'wind分成平均风力及脉动风力
28、平均风力的表示公式如式(8)和式(9)所示:
29、
30、
31、式(8)和式(9)中,cr(γr)和cn(γr)分别为经过无量纲化后的风力和风力矩系数;al为船舶水线以上侧投影面积,ρa和ρw分别为空气和水的密度,vr为相对风速,γr为风舷角,对于脉动风,可等效为白噪声,该白噪声的标准差与绝对风速成正比;
32、s12、浪的干扰:
33、浪力y'wave,n'wave分为两个组成部分:高频的一次力和低频的二次力。规则波对于船的传播方向称为浪向角,以χ表示,
34、一次浪力表示公式如式(10)和式(11)所示如下:
35、
36、
37、其中:
38、
39、式(12)中,ξ(t)代表在附体坐标系原点处波面的振荡,s(t)则表明沿波浪传播方向上的波面ξ的斜率在原点的数值,k为波数,ωe为未经滤波的遭遇频率,在进行仿真实验时应对ωe进行适当的滤波,二次力的计算目前尚无简捷而可靠的方法,将其等效为一种简单的线性模型,即用白噪声驱动一个典型二阶震荡环节施加在输出航向上。
40、s13、流的干扰:
41、近海船舶受潮流影响显著,常表现为往复流,往复流变化规律与正弦函数曲线基本一致,用式(13)近似计算:
42、
43、式(13)中:vm为最大流速,δt为所求时刻至转流时刻潮时差,t为涨(落)潮流持续时间,约为6小时。通常仿真时假定海流只改变船舶运动的位置和速度,而不改变船舶的航向,则如式(14)表示,有下列速度平衡方程:
44、
45、其中:中vc,γc分别表示流的绝对速度和绝对流向。
46、进一步地,所述基于实船旋回的轨迹和数据,得到船舶的旋回速降曲线的过程如下:
47、s21、采用指数下降法来拟合速度u的下降效果;
48、
49、s22、考虑到舵机伺服系统的特性,将舵机系统视为一个1阶惯性环节,则用公式(2)进行表示实际舵角与目的舵角的关系:
50、
51、在公式(16)中,δ表示实际舵角,δr目的舵角,而tr为时间常数,通常取7—14s。
52、随后根据上述得到的初步改进后的norrbin模型,然后结合实船旋回的旋回圈以及船舶的船长、船宽、吃水等船舶数据,对4个流体动力导数进行等比例调整:
53、s31、将流体动力导数y'r,n'r均放大一定倍数,无量纲横流系数cr取0.3,通过仿真结果与实船实验轨迹吻合度较好;
54、s32、选用首向最大纵距、尾向最大纵距、横向最大距离和纵向最大距离差作为船舶操纵性能的评价指标。通过符合度的算法,计算船舶旋回性能的平均符合度,见公式如下:
55、
56、5)首向最大纵距是指从操舵开始到船舶的航向转过任意角度时重心在向船首方向上所移动的最大纵向距离,用admax表示;
57、6)尾向最大纵距是指从操舵开始到船舶的航向转过任意角度时重心在向船尾方向上所移动的最大或最小纵向距离,用admin表示;
58、7)横向最大距离是指从操舵开始到船舶的航向转过任意角度时重心在向转舵方向上所移动的最大横向距离,用trmax表示;
59、8)最大纵距差是指船舶首向最大纵距与尾向最大纵距的差值,用admax-dmin表示。
60、进一步地,基于等比例放大流体动力导数及无量纲横流系数对船舶旋回圈的影响存在相似性的基础上,再探究单一流体动力导数对船舶旋回圈的影响的过程如下:
61、s61、单一放大后,为在y轴方向上的力对无量纲艏摇加速度导数的影响,船舶旋回圈的首向纵距略微缩小,尾向纵距略微增大,横距的变化则不明显,整体旋回圈略微下移;
62、s62、单一放大后,为在z轴方向上的力矩对无量纲艏摇加速度导数的影响,船舶旋回圈的首向纵距增大,尾向纵距减小,横距几乎不变,整体旋回圈上移;
63、s63、单一放大y'r后,y'r为在y轴方向上的力对无量纲艏摇速度导数的影响,船舶旋回圈的首向纵距略微增大,尾向纵距增大,横距也增大,整体旋回圈下移;
64、s64、单一放大n'r后,n'r为在z轴方向上的力矩对无量纲艏摇速度导数的影响,船舶旋回圈的首向纵距明显增大,尾向纵距明显增大,横距也明显增大,整体旋回圈增大明显。
65、进一步地,所述运用对应控制变量的方法,逐步试验得到不同的无量纲横流系数与4个流体动力导数之间的对应数据,之后对数据拟合找到无量纲横流系数与流体动力导数的对应关系式的过程如下:
66、s71、先将n'r与cr对应后,随后减小调整纵距,之后改变y'r调整横距,最后改变对旋回圈进行微调。
67、s72、整理出对应关系如下。
68、
69、进一步地,所述引入更多船舶数据找到不同船舶之间存在的对应公式,进行平均值处理整理出一组新的公式,得到最终改进后的norrbin模型的过程如下:
70、s91、整理出出一组新的公式如下,得到最终改进后的norrbin模型。
71、
72、本发明提供的一种改变无量纲横流系数的norrbin模型船舶预测方法,具有以下优点:
73、本发明具有以下优点:本发明通过探究了无量纲横流系数与流体动力导数之间的关系,结合不同的船舶的数据和仿真实验,整理了一套较为普适的船舶无量纲横流系数与流体动力导数之间的对应关系式。对不同船舶可以通过引入其对应数据,通过调整无量纲横流系数的大小,结合其对应的4个流体动力导数之间的对应公式,快速找到与实船轨迹符合度较高的旋回曲线。有效地简化了norrbin模型并进一步提高了非线性norrbin模型精度,解决了流体动力导数放大倍数难以求取的问题,为相关领域的研究和应用提供了有益参考。
74、该发明的优点在于能够有效地避免了只放大流体动力导数导致的仿真船舶旋回圈与实船旋回轨迹符合度较低的情况,通过调节无量纲横流系数的大小,快速找到与实船轨迹符合度较高的曲线,再根据求得的对应关系,快速找到与其对应的4个流体动力导数的放大倍数,可以依据流体动力导数对船舶旋回圈的影响规律适当再进行微调,进一步提高仿真实验与实船旋回圈的符合度,更好地预测船舶旋回。
75、1、本发明尝试性地给出一组较为普适的无量纲横流系数与流体动力导数的对应公式。
76、2、本发明对现有的norrbin模型进行改进,不但使用起来更为简便,同时也提高了norrbin模型的精度。
77、3、本发明通过反带入原公式数据船舶验证公式的成立与精度较高,又引入一艘新的船舶验证了公式具有普适性。
78、基于上述理由,本发明可以提高在不同情况下对船舶旋回运动的预测能力,可以在船舶运动控制领域广泛推广。
- 还没有人留言评论。精彩留言会获得点赞!