一种物联网管理系统及方法与流程
本发明涉及物联网监控,具体涉及一种物联网管理系统及方法。
背景技术:
1、物联网(internet of things,简称iot)是指通过各种信息传感器、射频识别技术、全球定位系统、红外感应器、激光扫描器等各种装置与技术,实时采集任何需要监控、连接、互动的物体或过程,随着科技的进步,物联网在生产领域逐渐普及。
2、在物联网架构中,人员和设备均视为同一子单元,人员的数据和设备的数据可以同步采集并识别,进而判断整个物联网系统的状态,尤其是人员脱岗现象。
3、现有的人员脱岗现象的监管方式是给工作人员划定一个工作范围,实时获取人员位置,一旦人员位置超出工作范围,就发出提示信息,这种方式的工作范围是固定的,当设备和员工的数量较多且经常变动时,很难界定工作范围,如何提供一种更加容易调节的脱岗监管方式是本发明技术方案想要解决的技术问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种物联网管理系统及方法,解决了如何在众多数据中快速地定位出现波动的时间段的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
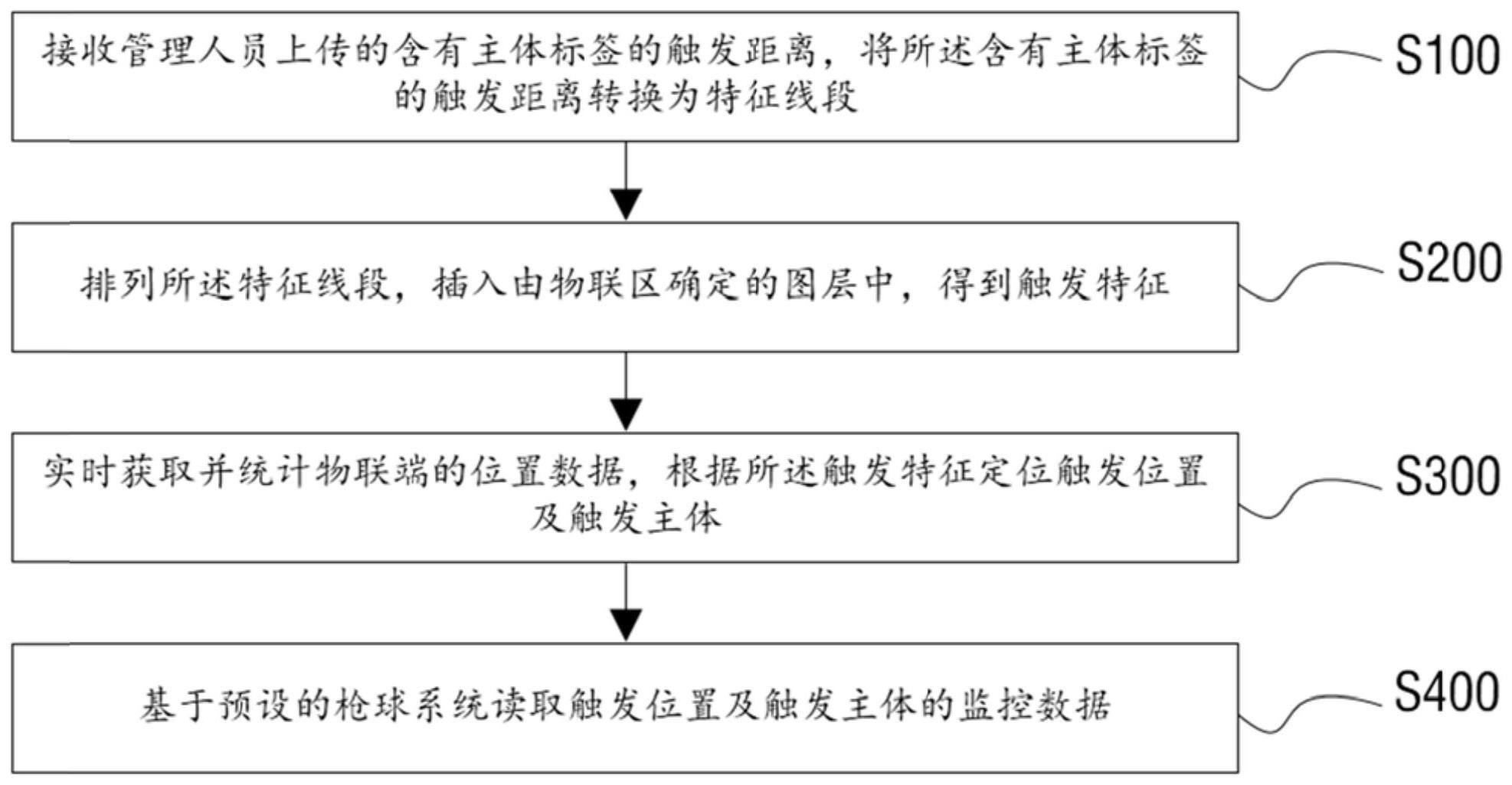
5、提供了一种物联网管理方法,该方法包括:
6、接收管理人员上传的含有主体标签的触发距离,将所述含有主体标签的触发距离转换为特征线段;
7、排列所述特征线段,插入由物联区确定的图层中,得到触发特征;其中,所述触发特征含有由主体标签确定的索引;
8、实时获取并统计物联端的位置数据,根据所述触发特征定位触发位置及触发主体;
9、基于预设的枪球系统读取触发位置及触发主体的监控数据。
10、作为本发明进一步的方案,所述接收管理人员上传的含有主体标签的触发距离,将所述含有主体标签的触发距离转换为特征线段的步骤包括:
11、读取备案的物联端,同步确定各物联端的活动区域;
12、依次选取两个物联端对应的活动区域,显示活动区域,接收管理人员输入的触发距离;所述触发距离不小于两个活动区域的最短距离;
13、根据预设的采集密度在两个活动区域中确定区域点;两个活动区域分别为第一区域和第二区域;
14、在第一区域中选取初始点,以触发距离为模长,在第二区域中选取目标点,连接所述初始点和所述目标点,得到特征线段;其中,所述初始点和所述目标点均包含于区域点;
15、获取两个物联端的名称,连接名称生成标签,根据所述标签统计所有特征线段。
16、作为本发明进一步的方案,所述获取两个物联端的名称,连接名称生成标签,根据所述标签统计所有特征线段的步骤包括:
17、根据预设的原点将特征线段转换为向量;
18、随机选取任意两个向量,计算两个向量的夹角;
19、将所述夹角与预设的夹角阈值进行比对,根据比对结果保留预设数量的特征向量。
20、作为本发明进一步的方案,所述排列所述特征线段,插入由物联区确定的图层中,得到触发特征的步骤包括:
21、读取特征线段的主体标签,组合主体标签,得到组合标签表;所述组合标签表中的最大组合数由管理人员预先设置;
22、依次读取组合标签,读取组合标签的特征线段并二级组合,得到组合标签对应的特征线段表;
23、读取物联区地图,创建物联区图层,将所述特征线段插入物联区图层并根据预设的规则截取线段区域,得到触发特征;所述触发特征为图层的子集。
24、作为本发明进一步的方案,所述实时获取并统计物联端的位置数据,根据所述触发特征定位触发位置及触发主体的步骤包括:
25、根据预设的采集频率实时获取物联端的位置数据;
26、读取物联区图层,将所述位置数据映射至所述物联区图层,得到位置分布图;
27、依次读取触发特征,基于所述触发特征遍历所述位置分布图,确定匹配位置;
28、读取触发特征对应的特征线段的主体标签,确定触发主体。
29、作为本发明进一步的方案,所述依次读取触发特征,基于所述触发特征遍历所述位置分布图,确定匹配位置的步骤包括:
30、读取触发特征,根据所述触发特征的尺寸在位置分布图中确定图像单元;
31、随机选取像素对,根据预设的绝对误差公式计算数据对的绝对误差;
32、累计绝对误差,当累计值达到预设的误差阈值时,读取像素对的对数;
33、根据所述对数选取图像单元,获取图像单元的位置,作为匹配位置;
34、其中,所述绝对误差公式为:
35、
36、
37、其中,ε(i,j,s,t)为以点(i,j)为左顶点的图像单元中点(s,t)的图像值与触发特征中点(s,t)的图像值之间的绝对误差;si,j(s,t)为以点(i,j)为左顶点的图像单元中点(s,t)的图像值;t(s,t)为触发特征中点(s,t)的图像值;为以点(i,j)为左顶点的图像单元的图像值均值;为触发特征的图像值均值;m和n为触发特征的尺寸。
38、作为本发明进一步的方案,所述基于预设的枪球系统读取触发位置及触发主体的监控数据的步骤包括:
39、根据触发位置生成枪球控制指令,获取触发位置处的监控数据;
40、根据所述触发主体对监控数据进行验证,根据验证结果标记监控数据的数据单元。
41、本发明技术方案还提供了一种物联网管理系统,所述系统包括:
42、特征生成模块,用于接收管理人员上传的含有主体标签的触发距离,将所述含有主体标签的触发距离转换为特征线段;
43、特征转换模块,用于排列所述特征线段,插入由物联区确定的图层中,得到触发特征;其中,所述触发特征含有由主体标签确定的索引;
44、特征匹配模块,用于实时获取并统计物联端的位置数据,根据所述触发特征定位触发位置及触发主体;
45、数据采集模块,用于基于预设的枪球系统读取触发位置及触发主体的监控数据。
46、作为本发明进一步的方案,所述特征生成模块包括:
47、区域确定单元,用于读取备案的物联端,同步确定各物联端的活动区域;
48、距离接收单元,用于依次选取两个物联端对应的活动区域,显示活动区域,接收管理人员输入的触发距离;所述触发距离不小于两个活动区域的最短距离;
49、区域点确定单元,用于根据预设的采集密度在两个活动区域中确定区域点;两个活动区域分别为第一区域和第二区域;
50、线段生成单元,用于在第一区域中选取初始点,以触发距离为模长,在第二区域中选取目标点,连接所述初始点和所述目标点,得到特征线段;其中,所述初始点和所述目标点均包含于区域点;
51、线段统计单元,用于获取两个物联端的名称,连接名称生成标签,根据所述标签统计所有特征线段。
52、作为本发明进一步的方案,所述特征转换模块包括:
53、第一组合单元,用于读取特征线段的主体标签,组合主体标签,得到组合标签表;所述组合标签表中的最大组合数由管理人员预先设置;
54、第二组合单元,用于依次读取组合标签,读取组合标签的特征线段并二级组合,得到组合标签对应的特征线段表;
55、区域截取单元,用于读取物联区地图,创建物联区图层,将所述特征线段插入物联区图层并根据预设的规则截取线段区域,得到触发特征;所述触发特征为图层的子集。
56、(三)有益效果
57、本发明提供了一种物联网管理系统及方法。与现有技术相比,具备以下有益效果:
58、本发明通过接收管理人员上传触发距离,根据触发距离自动生成触发特征,根据触发特征实时对所有位置数据进行遍历匹配,从而快速定位异常位置,通过一个数据处理器即可对整个物联区进行全局管控,当监管要求变化时,直接调节触发距离,即可完成设定,灵活度极高。
59、值得一提的是,关于距离判断过程,还有一种方式就是直接确定多个条件,比如a端与b端的距离不超过a、a端与c端的距离不超过b等,当端口数量较多时,判断条件的数量极大,尤其是面对两种或两种以上的异常交互的情况,此时,需要多个嵌套式的if语句;虽然其原理更加简单,但是实际的操作过程难度较高,主要是条件设定过程的复杂性。
60、而本技术文件中提供的技术,将触发距离转换为图像特征,将所有判断条件集成在由机器完成的遍历匹配过程,只需要一个分类器,即可快速地定位目标位置及目标主体。
- 还没有人留言评论。精彩留言会获得点赞!