一种基于杂草密度检测的田间草害预警方法
本发明涉及农业领域,具体涉及一种基于杂草密度检测的田间草害预警方法。
背景技术:
1、茶叶、花生、水稻等农作物的生长过程中,种植人员为农作物的生长提供了较为适宜的营养、水分等生长环境,在这样的生长环境下,往往也容易滋生杂草,杂草会遮挡农作物的阳光、抢夺农作物养分,侵占地上和地下空间,导致农作物减产,最终影响经济效益。所以农作物生长过程中往往需要进行除草,而除草首先需要进行杂草检测。传统的杂草检测方法主要是人工巡查,然而这种方式存在费时费力、效率低下、漏检率较高的问题,因此亟需一种新的高自动化、高效率、高准确率的杂草检测方法。
2、关于杂草的自动化检测这块,申请公布号为cn115546639a的发明专利申请公开了“一种基于改进的yolov5模型的林间杂草检测方法”,用于获取林间植被图像数据,将获取的植被图像数据输入到改进的yolov5模型中,得到森林中杂草的检测结果。再例如申请公布号为cn114818909a的发明专利申请公开了“一种基于作物长势特征的杂草检测方法和装置”,通过获取田间各植物的图像及作物的生长期,得到待检图像库;将待检图像库输入训练好的第一分类器,对所述图像进行内容识别,根据内容识别结果获取杂草图像;将所述杂草图像上传检测图像并人工标记,根据人工标记结果将图像分类存储至第一样本库和第三样本库中;将所述杂草图像输入训练好的第二分类器,对所述图像进行特征识别,根据特征识别结果剔除杂草图像中的作物图像,得到杂草检测结果。
3、然而上述的现有技术存在以下问题:
4、所述的基于改进的yolov5模型的林间杂草检测方法以计算机视觉为核心,利用深度学习、图像处理等技术,对图像或视频中特定对象进行识别定位,但是农作物周围杂草数量和种类繁多,且杂草特征相似度极高,杂草之间还存在重叠和互相遮挡,致使识别准确率和速度并不能很好地达到预期,且样本库构建、数据打标签困难,标注样本的工作量较大,成本较高,而且标注容易出错。
5、所述的基于作物长势特征的杂草检测方法基于作物长势特征进行杂草检测,在一定程度上避免了杂草种类繁多且不同生长环境下杂草特征差异较大杂草总样本库构建困难的问题,但需要对作物不同阶段、不同作物器官进行识别,和打标签等工作,工作量较大,且识别准确率不高。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种基于杂草密度检测的田间草害预警方法,所述田间草害预警方法具有适用范围广、准确率高、检测过程简单的优点。
2、本发明解决上述技术问题的技术方案是:
3、一种基于杂草密度检测的田间草害预警方法,包括以下步骤:
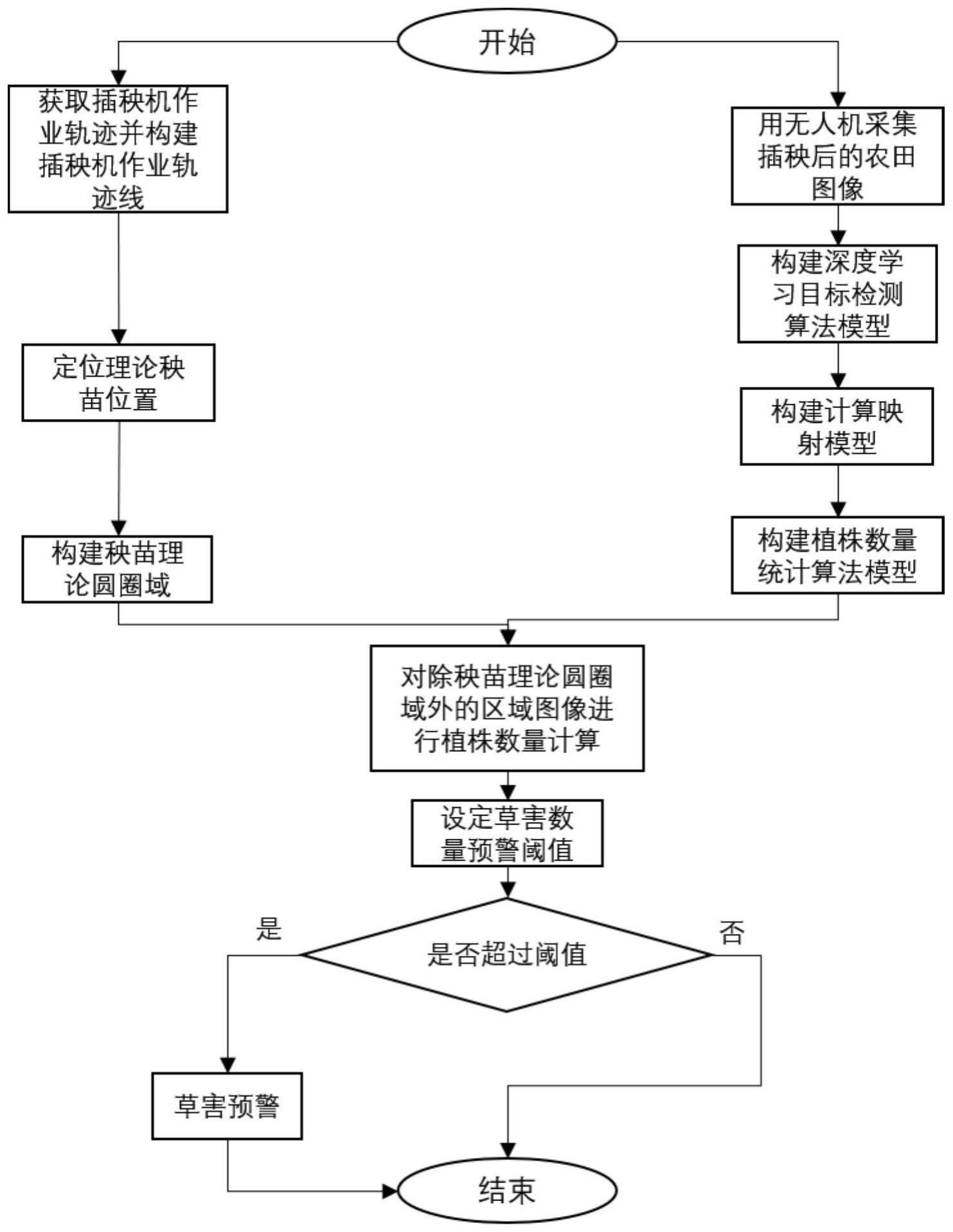
4、s1、获取插秧机的作业定位坐标,并构建插秧机作业轨迹线;
5、s2、结合插秧机的插秧机具的机械特性,以此来定位理论秧苗坐标位置;
6、s3、结合实际秧苗地理坐标的间距,以理论秧苗地理坐标为原点,以预设距离为半径构建理论秧苗圆圈域;
7、s4、利用无人机采集插秧后的农田图像;
8、s5、通过采集到的农田图像来构建用于识别和定位植株的深度学习目标检测模型;
9、s6、构建计算映射模型,将理论秧苗圆圈域映射至无人机采集的农田图像中;
10、s7、构建植株数量统计算法模型,在农田图像中对目标检测算法检测到的植株进行数量统计计算;
11、s8、对采集的理论秧苗圆圈域外的农田图像进行目标检测处理及植株数量统计,设定草害预警数量阈值,超出该阈值则代表草害严重,即需要进行预警。
12、优选的,在步骤s1中,通过在插秧机的顶部安装rtk天线和在其内部安装rtk接收机,记录插秧机作业时的实时定位坐标,并将记录的插秧机实时定位坐标用平滑曲线连接,以此来构建插秧机作业轨迹线。
13、优选的,在步骤s2中,通过判定插秧机作业时插秧机具的机械特性,所述机械特性为秧苗之间的插秧间距;通过确定相邻两株理论秧苗之间的秧苗间距,从而确定理论秧苗的位置坐标。
14、优选的,在步骤s3中,以所述的理论秧苗位置坐标为原点,设定不超过20厘米的预设距离为半径,构建秧苗理论圆圈域,该秧苗理论圆圈域内的植株均视为秧苗。
15、优选的,在步骤s4中,利用无人机采集插秧后的农田图像,所采用的无人机应为带有rtk定位功能的高精度无人机;该无人机的拍摄像素及拍摄高度需要达到拍摄要求且能够记录拍摄农田图像时的该无人机的坐标位置信息。
16、优选的,在步骤s5中,所述深度学习目标检测模型的构建步骤为:
17、s51、利用无人机采集获取足量的农田图像,并对农田图像进行预处理;、
18、s52、进行anaconda环境搭建并下载好yolo模型;
19、s53、以7:3的比例将采集的农田图像样本划分训练集和测试集,并借助labeling工具对无人机拍摄到的农田图像中的植株进行标注;
20、s54、训练模型,并对训练结果进行测试,当精度符合要求后,得到所述的深度学习目标检测模型。
21、优选的,在步骤s6中,所述计算映射模型的构建步骤为:
22、通过计算无人机拍摄的每张农田图像中的每个像素的经纬度范围,将符合图像经纬度范围的插秧机作业轨迹及理论秧苗圆圈域映射至农田图像中,使无人机拍摄到的农田图像相应的位置有理论秧苗圆圈域,且与实际相对应。
23、优选的,在步骤s7中,所述植株数量统计算法模型的构建步骤为:
24、通过深度学习目标检测模型对农田图像进行处理,检测出农田图像中所有的植株,添加编写植株数量统计的代码,构建农田图像中用于统计植株个数的算法模型,该算法模型用于将农田图像中检测到的植株进行数量统计。
25、优选的,在步骤s8中,计算无人机拍摄到的农田图像中的每个像素的经纬度范围,找出在此经纬度范围内的插秧机的作业轨迹,结合插秧机的插秧机具的机械特性所构建理论秧苗圆圈域,并通过计算映射模型,将理论秧苗圆圈域映射至无人机拍摄的农田图像中,通过深度学习目标检测模型对理论秧苗圆圈域外的农田图像进行处理,找出理论秧苗圆圈域外的农田图像中的所有植株,并通过植株数量统计算法统计检测到的植株数量,通过结合农田实际环境及种植情况,设定预警阈值,将统计到的植株数量与预警阈值进行对比,如若超过阈值,则进行草害预警。
26、本发明与现有技术相比具有以下的有益效果:
27、(1)、本发明的基于杂草密度检测的田间草害预警方法无需对特定杂草进行标注识别,而是对所有植株进行识别定位,在一定程度上避免了单纯识别杂草准确率低及打标签困难的问题。
28、(2)、本发明的基于杂草密度检测的田间草害预警方法结合插秧机作业信息,通过确定理论秧苗圆圈域,对无人机拍摄到的农田图像进行处理时,只需要处理理论秧苗圆圈域外的部分区域,在一定程度上可以减少图像处理的工作量,提高检测效率。
29、(3)、本发明的基于杂草密度检测的田间草害预警方法通过减少图像处理面积结合减少检测针对性的方式,可增加检测的精准度及提高检测的效率。
- 还没有人留言评论。精彩留言会获得点赞!