车道划分方法、装置、电子设备与流程
本申请涉及路侧感知,尤其涉及一种车道划分方法、装置、电子设备。
背景技术:
1、在大部分城市道路中都有车道线划分,会有小部分城市道路或者乡镇道路是没有车道线的。虽然没有车道线,也是会存在双向行驶或单向行驶的情况,通常会根据各自行驶区域范围划分不同的默认航向。
2、相关技术中,当需要地图采集车更新城市道路中的车道线时,如果没有车道线的划分,便无法实现更新。进一步由于没有车道线,也无法在云端或车端生成高精地图时判断出该道路中车道/车道线的划分情况。
技术实现思路
1、本申请实施例提供了一种车道划分方法、装置、电子设备,以通过路侧感知结果实现车道划分。
2、本申请实施例采用下述技术方案:
3、第一方面,本申请实施例提供一种车道划分方法,其中,该方法由路侧端执行,所述方法包括:
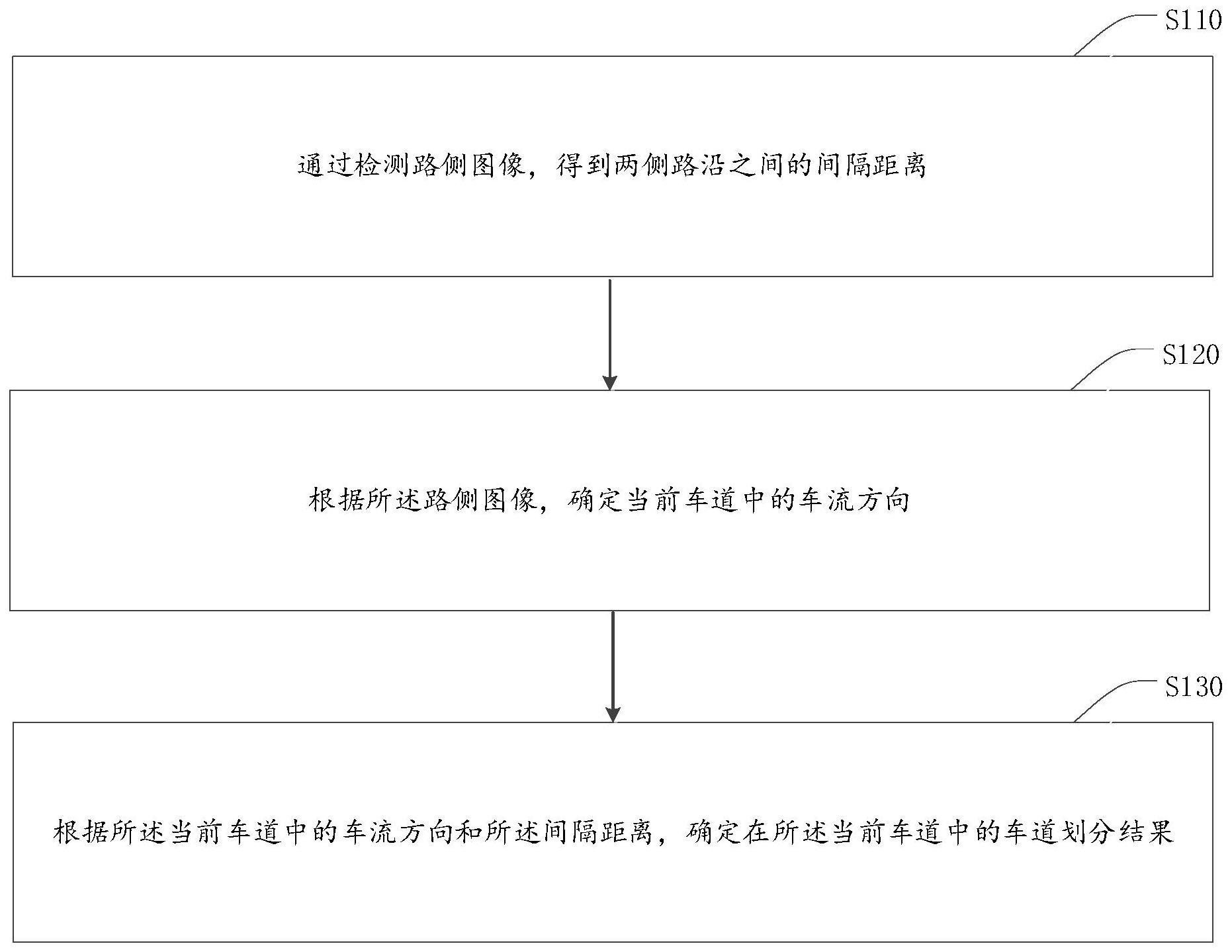
4、通过检测路侧图像,得到两侧路沿之间的间隔距离;
5、根据所述路侧图像,确定当前车道中的车流方向;以及
6、根据所述当前车道中的车流方向和所述间隔距离,确定在所述当前车道中的车道划分结果。
7、在一些实施例中,所述检测路侧图像,得到两侧路沿之间的间隔距离,包括:
8、对所述路侧图像进行路沿检测,得到路沿在路侧图像中的图像像素位置;
9、根据路沿在路侧图像中的图像像素位置,将属于同一路沿中的图像像素位置转换到地面世界坐标系下,并拟合得到路沿曲线方程;
10、根据所述路沿曲线方程,计算出两侧路沿之间的间隔距离。
11、在一些实施例中,所述根据所述路沿曲线方程,计算出两侧路沿之间的间隔距离,包括:
12、在所述地面世界坐标系下任取一条路沿上的第一位置点;
13、根据所述第一位置点的在所述地面世界坐标系下的位置和所述路沿曲线方程,确定另一条路沿上与所述第一位置点距离最近的第二位置点,计算所述第一位置点与所述第二位置点之间的间隔距离,用以作为两侧路沿之间的间隔距离。
14、在一些实施例中,所述根据所述当前车道中的车流方向和所述间隔距离,确定当前车道中车道划分结果,包括:
15、判断所述间隔距离/2的是否小于第一预设距离;
16、如果判断所述间隔距离/2小于第一预设距离,则认为当前车道中为单车道;
17、根据所述当前车道中的车流方向中目标行驶方向在车道内的行驶方向,得到每条车道的规定行驶方向。
18、在一些实施例中,所述根据所述当前车道中的车流方向和所述间隔距离,确定当前车道中车道划分结果,包括:
19、判断所述间隔距离/2是否大于第一预设距离且小于第二预设距离;
20、如果判断所述间隔距离/2大于第一预设距离且小于第二预设距离,则认为当前车道中为两车道;
21、根据所述当前车道中的车流方向中的车流数量,判断所述两车道是双向两车道或单向两车道;
22、根据所述当前车道中的车流方向中目标行驶方向在车道内的行驶方向,得到每条车道的规定行驶方向。
23、在一些实施例中,所述根据所述当前车道中的车流方向和所述间隔距离,确定当前车道中车道划分结果,包括:
24、判断所述间隔距离/2是否大于第二预设距离且小于第三预设距离;
25、如果判断所述间隔距离/2大于第二预设距离且小于第三预设距离,则认为当前车道中为三车道;
26、根据所述当前车道中的车流方向中的车流数量,判断所述三车道是双向三车道或单向三车道;
27、根据所述当前车道中的车流方向中目标行驶方向在车道内的行驶方向,得到每条车道的规定行驶方向。
28、在一些实施例中,根据所述路侧图像,确定当前车道中的车流方向,包括:
29、对所述路侧图像进行车辆目标检测,并且滤除车道外的目标;
30、根据车辆目标检测的结果,跟踪车道内的目标;
31、通过跟踪车道内的目标,判断出目标的行驶方向;
32、根据所述行驶方向的差异大小判断所述当前车道有一个或多个车流方向。
33、在一些实施例中,所述确定在所述当前车道中的车道划分结果之后,还包括:
34、将所述车道划分结果中的路沿在地面世界坐标的位置、车道划分数量、车流划分方向上传至云端,用以在云端更新对应区域的地图数据。
35、第二方面,本申请实施例还提供一种车道划分装置,其中,该装置由路侧端执行,所述装置包括:
36、检测模块,用于通过检测路侧图像,得到两侧路沿之间的间隔距离;
37、第一确定模块,用于根据所述路侧图像,确定当前车道中的车流方向;以及
38、第二确定模块,用于根据所述当前车道中的车流方向和所述间隔距离,确定在所述当前车道中的车道划分结果。
39、第三方面,本申请实施例还提供一种电子设备,包括:处理器;以及被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行上述方法。
40、第四方面,本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被包括多个应用程序的电子设备执行时,使得所述电子设备执行上述方法。
41、本申请实施例采用的上述至少一个技术方案能够达到以下有益效果:由于方法在路侧端执行,可以通过检测路侧图像,得到两侧路沿之间的间隔距离,根据所述路侧图像,确定当前车道中的车流方向。最后根据所述当前车道中的车流方向和所述间隔距离,确定在所述当前车道中的车道划分结果。通过本申请利用路侧端的感知设备在无车道线道路中划分车道范围。
技术特征:
1.一种车道划分方法,其中,该方法由路侧端执行,所述方法包括:
2.如权利要求1所述方法,其中,所述检测路侧图像,得到两侧路沿之间的间隔距离,包括:
3.如权利要求2所述方法,其中,所述根据所述路沿曲线方程,计算出两侧路沿之间的间隔距离,包括:
4.如权利要求1所述方法,其中,所述根据所述当前车道中的车流方向和所述间隔距离,确定当前车道中车道划分结果,包括:
5.如权利要求1所述方法,其中,所述根据所述当前车道中的车流方向和所述间隔距离,确定当前车道中车道划分结果,包括:
6.如权利要求1所述方法,其中,所述根据所述当前车道中的车流方向和所述间隔距离,确定当前车道中车道划分结果,包括:
7.如权利要求1至6任一项所述方法,其中,根据所述路侧图像,确定当前车道中的车流方向,包括:
8.如权利要求1至6任一项所述方法,其中,所述确定在所述当前车道中的车道划分结果之后,还包括:
9.一种车道划分装置,其中,该装置由路侧端执行,所述装置包括:
10.一种电子设备,包括:
技术总结
本申请公开了一种车道划分方法、装置、电子设备,所述方法包括:通过检测路侧图像,得到两侧路沿之间的间隔距离;根据所述路侧图像,确定当前车道中的车流方向;以及根据所述当前车道中的车流方向和所述间隔距离,确定在所述当前车道中的车道划分结果。通过本申请实现通过路侧感知结果划分出没有车道线的车道中的车道范围。
技术研发人员:张上鑫
受保护的技术使用者:蘑菇车联信息科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!