一种基于双流无际粒子滤波的滚动轴承集成寿命预测方法
本发明属于故障预测与健康管理,涉及一种基于双流无际粒子滤波的滚动轴承集成寿命预测方法。
背景技术:
1、滚动轴承作为旋转机械的关键零部件,其健康状态直接关系到机械设备能否良性运行。当滚动轴承发生故障时,应尽快关闭机器以避免灾难性的后果,而这一状况往往发生在不方便的时间,因此常常会造成大量的时间浪费和经济损失。若能对轴承的健康状态进行实时监测,对设备采取预测性维护,这既能有效避免重大安全事故的发生,又可以减少机械的计划外维护费用。因此,对轴承的运行状态进行监测并预测其剩余使用寿命具有重要意义。
2、目前,寿命预测方法通常可分为两类:数据驱动方法和基于模型的方法。数据驱动方法利用人工智能技术,卷积神经网络,相关向量机,模糊神经系统等,通过学习历史观测数据来估计机械设备的运行状态然后对其剩余寿命进行预测。但此类方法依靠大量高质量的实验数据,这在工程实践中是极难获得的。而基于模型的方法是建立反映轴承健康状态的模型来描述轴承的退化过程,然后基于监测数据实时更新模型参数并预测其剩余寿命。此类方法既不需要明晰轴承失效机理,也无需大量的数据进行训练,因此其在轴承的寿命预测之中应用极为广泛。无际粒子滤波作为一种强大的非线性滤波技术,其在健康状态估计和寿命预测方面也受到了越来越多的关注。但依赖经验所构建的无际粒子滤波模型的鲁棒性较差,特别是当轴承退化过程较为复杂时,其预测精度较低。
技术实现思路
1、本发明旨在提供一种基于双流无际粒子滤波的滚动轴承集成寿命预测方法,以提高波动退化过程滚动轴承的寿命预测精度。
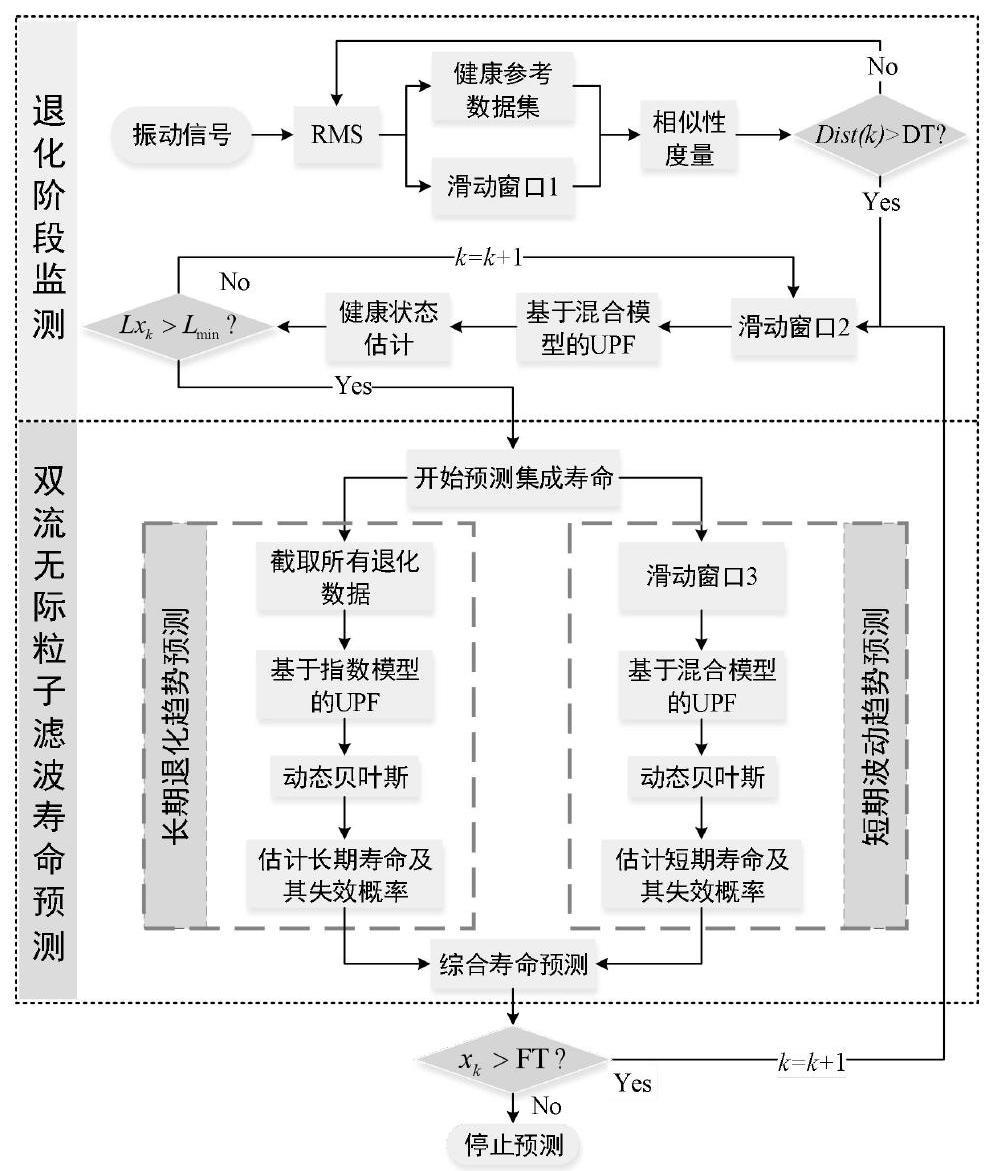
2、为实现上述目的,本发明提供了一种基于双流无迹粒子滤波的滚动轴承集成寿命预测方法。首先,所提方法采用基于相似性度量的方法自适应识别滚动轴承的退化阶段;其次,基于指数模型和多项式模型的特点,构建了双流无际粒子滤波模型,实现了轴承整体退化趋势和局部波动双流信息的有效挖掘;为了综合评估轴承的整体健康状态,提出了基于动态贝叶斯的综合融合策略定量评估双流信息源的失效概率,进而实现波动过程滚动轴承集成寿命的有效估计。
3、s1无际粒子滤波理论;
4、粒子滤波(pf)是基于蒙特卡洛仿真的近似贝叶斯滤波算法,其核心思想是用一组离散的随机采样点近似系统随机变量的概率密度函数,并以样本均值代替积分运算,从而获得状态的最小方差估计。由于在处理非线性、非高斯性问题方面所表现出的优越性,pf技术一经提出便被广泛应用到各个领域,自orchard等人于2005年首次将pf引入寿命预测之中,后国内外多名学者开始运用pf算法预测滚动轴承的剩余寿命。
5、在基于pf的滚动轴承寿命预测中,常通过构建状态模型来描述轴承系统的退化过程,具体由一组包括状态方程和量测方程组成,如下:
6、xk=fk(xk-1,vk-1)
7、yk=hk(xk,wk)
8、其中,xk是轴承系统的健康状态,下标k表示时间;vk为轴承系统噪声,常表现为高斯白噪声;fk为轴承系统的状态传递函数,往往反映了当前时刻与前一时刻轴承工作状态之间的联系,常表现为线性或非线性关系;yk是轴承系统在k时刻的量测值;wk为传感器测量噪声,其均值和方差是传感器的固有属性;hk为轴承系统量测函数,表达了轴承状态与量测结果之间的关系,常表现为线性关系。
9、然而,传统pf常出现粒子退化问题,即经过若干次迭代,大多数轴承状态粒子的权值会小到忽略不计的程度,继续迭代不仅会造成计算资源的浪费,还会导致轴承状态估计不准确。
10、而upf通过无迹卡尔曼滤波(ukf)构造粒子滤波的重要性采样分布。在计算轴承状态均值和方差时,ukf基于无迹变换利用了最新的量测信息,提高了状态粒子追踪精度,因此能够在一定程度上改善状态粒子的退化问题。
11、upf算法流程如下:
12、1)初始化阶段。当k=0时,从先验分布p(x0)中采样m个轴承状态粒子生成原始状态粒子集将每个状态粒子的权值设置为当k>0,k=k+1,然后依次迭代得到每一时刻的状态粒子集
13、2)重要性采样阶段。首先利用ukf算法计算每一个状态粒子的均值和协方差根据高斯分布计算采样更新状态粒子如下:
14、
15、然后,利用量测值更新各状态粒子的权值:
16、
17、最后,对轴承状态粒子的权值进行归一化:
18、
19、3)重采样阶段。对状态粒子按其权值大小进行排序,在粒子数目不变的情况下,舍弃权值较小的状态粒子,同时复制权值较大的状态粒子。现在常见的重采样算法有随机重采样、系统重采样、多项式重采样和残差重采样,并将重采样后状态粒子的权值进行等值化处理。
20、4)状态估计阶段。对状态粒子进行加权求和,从而实现对轴承健康状态的有效估计。
21、
22、
23、其中,pk为k时刻upf的协方差矩阵。
24、s3基于双流无迹粒子滤波的滚动轴承集成寿命预测方法;
25、s3.1初始退化时刻(tsd)的确定;
26、在确定滚动轴承全生命周期的健康指标(hi)后,实时监测轴承何时进入退化阶段便是寿命预测工作的第一步。
27、本文采用相似性的方法估计轴承的初始退化时刻,即tsd点。具体估计流程如下:首先设置一个长度为m的固定窗口并选择健康状态下的hi作为基本参考数据集,同时设置一个相同长度的滑动窗口1截取m个最新状态估计值,最后计算两组数据之间的欧氏距离以衡量二者之间的相似性:
28、
29、通过计算每一时刻滑动窗口与固定窗口数据间的欧氏距离,如此便获得了欧氏距离随时间的变化曲线,此时计算健康阶段欧氏距离的均值μdist,并将μdist的三倍作为确定轴承进入退化阶段的退化阈值dt。当监测到某一时刻的欧氏距离首次超过dt时,则表明轴承已经进入退化阶段,此时滑动窗口内包含了部分的健康数据和退化数据,具有较好的趋势性且包含了一定的早期微弱故障信息。为充分利用退化数据,本文选择滑动窗口前一时刻作为轴承进入退化阶段的时刻,即tsd点。
30、s3.2开始预测时刻(tsp)及失效阈值(ft)的确定;
31、当监测到轴承已进入退化阶段时,为有效利用退化数据,需要先对最近一段时间的健康状态进行估计,当健康状态估计值的长度达到预测长度要求时,即可对轴承的rul进行预测。本文将包含指数模型和二次多项式的混合模型作为upf的状态模型对此阶段轴承的健康状态进行估计。
32、
33、其中,a1,a2,a3,a4,a5均为混合模型的系数向量,t为不同监测时刻,vk为测量噪声。
34、在确定tsp点时,首先设置一个长度为l的滑动窗口2,截取刚进入退化阶段的l个hi,然后采用基于混合模型的upf估计tsd+l时轴承的退化状态然后向前移动滑动窗口并对下一时刻健康状态进行估计如此循环往复。当状态估计值集合的长度大于lmin时,即可开始对轴承的rul进行估计,lmin为预设的预测轴承rul最小长度。并将当前时刻设置为轴承的tsp点。
35、确定tsp点后,接下来对轴承的ft进行估计。首先需要截取健康状态下的健康指标z1,z2,...,ztsp-1,然后计算该组数据集的均值μ和方差σ,最后计算轴承的失效阈值(ft):
36、ft=μ+λσ
37、其中,λ为完全失效准则系数,其值取决于具体轴承工况。
38、s3.2集成寿命(irul)预测;
39、在轴承工作过程中,其性能退化过程整体呈波动上升趋势。其中,轴承的退化趋势表明了健康状态的演变趋势,而局部的波动则隐藏了轴承最新的缺陷扩展情况,二者分别从不同时间尺度揭示了轴承的退化过程,因此预测轴承的irul应充分考虑整体和局部的健康状态。
40、所提集成寿命预测流程如下:
41、1)stream one:基于整体退化趋势的长期rul预测:
42、在轴承的性能退化过程中,其hi整体呈上升趋势,寿命预测的研究热点之一便是挖掘退化过程的趋势信息。在常见寿命预测模型中,指数模型具有极高的稳定性,因此将指数模型作为upf的状态模型分析轴承整体的退化趋势,实现对其rul的长期预测,如下:
43、
44、其中,a1,a2均为指数模型的系数向量,t为不同监测时刻,vk为测量噪声。
45、当监测到轴承进入rul可预测的退化阶段时,截取所有状态估计值,然后基于upf对指数模型参数进行估计获得全局最优退化模型并预测轴承未来退化状态为了估计轴承的全局失效寿命,提出动态贝叶斯对未来每一时刻失效概率进行估计,如下:
46、
47、
48、
49、其中,表示轴承在t0到t0+j-1时刻都是健康,而在t0+j时刻开始失效的概率,是从t0到t0+j-1时刻轴承都保持健康的概率,为在t0+j时刻失效的概率,本发明所涉及的概率值取值均为0-1;q为标准高斯分布函数,σ为某个时间段内的标准差。
50、如此便获得了未来每一时刻轴承的失效概率,其中最大失效概率lt_pk所对应的时刻即为长期失效时刻lpre_t0,如下式:
51、
52、因此,t0时刻估计的长期轴承rul即为:
53、lt_rulk=lpre_tk-tk
54、2)stream two:基于局部波动信息的短期rul预测:
55、在轴承的性能退化过程中,缺陷的扩展情况与健康指标之间并非简单的线性映射关系,而是有着复杂的机理。例如,轴承的疲劳剥落过程可能包含一次或数次的波动,每个波动都可能包含着直接导致轴承失效的故障信息。但针对波动过程进行建模并进行寿命预测是极其困难的由于每个波动产生的时刻、持续时间及振幅大小都是不确定的。为了最大程度的利用隐藏在波动过程中的故障信息,本文采用了高次多项式与指数相结合的混合模型对短期波动寿命进行预测。在混合模型中,指数模型可以很好地追踪局部的退化趋势,而由于高次多项式的存在,混合模型也能够对局部退化趋势的突变及时做出反应,从而有效利用最新的局部退化信息。
56、当轴承进入到可预测的退化阶段时,即可开始对其短期波动寿命的预测。首先需要设置一个长度为n的滑动窗口3截取最近的hi,然后将混合模型作为upf的状态模型,最后基于动态贝叶斯算法获得短期波动寿命sf_rulk及其失效概率sf_pk,具体计算流程同上一节长期趋势寿命计算过程。
57、然而,在预测具有复杂退化过程的短期波动寿命时,极有可能出现混合模型失效的情况,局部最优退化模型无法有效预测未来退化趋势,失效概率值lf_pk也远低于正常值。因此,为了应对此类状况,需要设置一个模型最小失效概率pmin。当混合模型预测的失效概率小于pmin时,将混合模型替换为更为稳定的指数模型进行预测。当指数模型也失效时,表明轴承出现更为复杂的退化过程,局部预测已无法提供有效的rul预测值,此时令sf_rulk=0,sf_pk=0,即默认将长期趋势寿命作为最终的寿命预测结果。
58、3)集成寿命irul估计:
59、在获得长期趋势寿命lt_rulk和短期波动寿命sf_rulk后,以双流失效概率为依据,对轴承的集成寿命erulk进行预测:
60、
61、s3.3性能评价指标;
62、为了定量衡量所提算法的预测性能,本文引入最小均方误差rmse和累计相对精度cra评估几种预测模型。
63、rmse是反映估计量与真实值之间差异性的一种度量,能够较好地反映预测的精确度,其计算方法如下:
64、
65、其中,为t时刻预测寿命值,为t时刻真实寿命值,teol为到达失效阈值时对应的失效时刻,ttsp为起始预测时刻。
66、相对精度是指在某一特定时刻的相对预测误差:
67、
68、为了全面地衡量整体预测效果,对每个时刻的相对精度通过累计加权获得累积相对精度指标(cra):
69、
70、
71、其中,ωλ是归一化权重系数,k为预测结果长度。
72、与现有技术相比,本发明具有如下有益效果:
73、本发明采用的技术方案为一种基于双流无际粒子滤波的滚动轴承集成寿命预测方法。首先,该方法基于相似性原理实现了轴承退化阶段的自适应识别;其次,针对滚动轴承一致性差、退化过程复杂导致预测精度较低的问题,分别采用指数模型和多项式模型对滚动轴承长期的退化趋势和短期的局部波动进行分析,此举不仅提高了轴承退化信息的利用率,还增强了在预测不同趋势轴承寿命时模型的泛化能力;同时引入动态贝叶斯对长短期退化过程的失效概率进行估计,通过融合不同时间尺度的寿命信息,有效提高了模型在预测具有波动过程轴承寿命的预测精度和鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!