一种基于LSTM深度神经网络的整车载荷分解方法与流程
本发明属于汽车仿真领域,具体涉及一种基于lstm深度神经网络的整车载荷分解方法。
背景技术:
1、汽车零部件外联点的载荷谱无法直接通过传感器测量,需要通过多体动力学仿真软件将测试得到的六分力分解到各个零部件,测量的六分力不能直接施加到多体动力学模型,否则数值求解容易出现不收敛,无法正常求解整车零部件载荷,为了求解整车零部件的疲劳耐久载荷,需要基于虚拟迭代方法,根据实际测量的悬架位移及轮心加速度求解轮心的垂向位移激励。虚拟迭代是通过汽车悬挂系统的加速度响应及位移响应求解汽车轮心垂向位移的一种方法,传统虚拟迭代方法随着多体动力学模型建模越来越精细,虚拟迭代求解轮心垂向位移的周期越来越长。导致该方法使用成本高/周期长,最终导致汽车产品开发周期长,因此迫切需要有一种更好的轮心垂向位移求解方法。
2、汽车底盘悬挂系统属于典型的动力学系统,由于动力学系统阻尼的存在,板簧任一个网格单元在每一个时刻的动力学响应(应变/应力)和上一个时间时刻紧密相关。传统的深度神经网络,无法考虑时间依赖问题,因此无法很好地用于解决时间系列预测问题。循环神经网络(recurrent neural network,rnn),rnn 借助循环核从时间维度提取信息,循环核参数时间共享,可以对有时间依赖的时间序列问题进行预测,但当时间系列很长,rnn模型容易出现梯度消失问题,导致时间系列预测效果较差。
技术实现思路
1、为了解决长期依赖问题,本发明采用长短记忆网络(long short term memory,lstm)模型,提供一种可以更加高效根据已知测量的响应求解轮心垂向位移激励的载荷分解方法。具体技术方案如下:
2、基于lstm深度神经网络的载荷分解流程步骤如下s1-s7:
3、s1:将待开发车型的基础物理样车进行实车测量道路载荷谱,包括用拉线位移传感器测量悬架位移ltest,轮心加速度acctest,轮心的六分力载荷fx,fy,fz,mx,my,mz;
4、s2:根据整车的参数搭建整车的多体动力学模型;
5、s3:将s1测量得到的ltest施加到s2中的整车多体动力学模型,求解仿真模型的悬架位移量lsimulation,轮心的垂向加速度accsimulation;
6、s4:构建lstm循环神经网络深度学习模型;
7、s5:将s1中所测量的ltest和s3中仿真得到的悬架位移量lsimulation和轮心的垂向加速度accsimulation分别作为s4的深度学习模型输出和输入对神经网络进行训练,并对训练结果进行评价;
8、s6:将实测得到的轮心加速度acctest及悬架位移ltest经处理后输入深度神经网络,求解得到轮心的垂向位移dz;
9、s7:整车载荷分解:将fx,fy,mx,my,mz及dz作为s2整车多体动力学模型的轮心输入,求解获得整车的各个零件连接点的载荷。
10、进一步的,所述步骤s1中所述悬架位移为左前,右前,左后和右后四个四分之一悬架的相应值,轮心加速度为四个车轮的轮心加速度。
11、进一步的,步骤s2具体为根据待求解载荷的整车基于adams、simpack或motionview搭建整车多体动力学模型,然后对整车多体动力学模型的悬架进行垂向刚度对标,确保整车的垂向刚度和实车一致。
12、进一步的,步骤s3中仿真模型求解整车的四个车轮的轮心仿真加速度数据和四个四分之一悬挂架的位移数值。
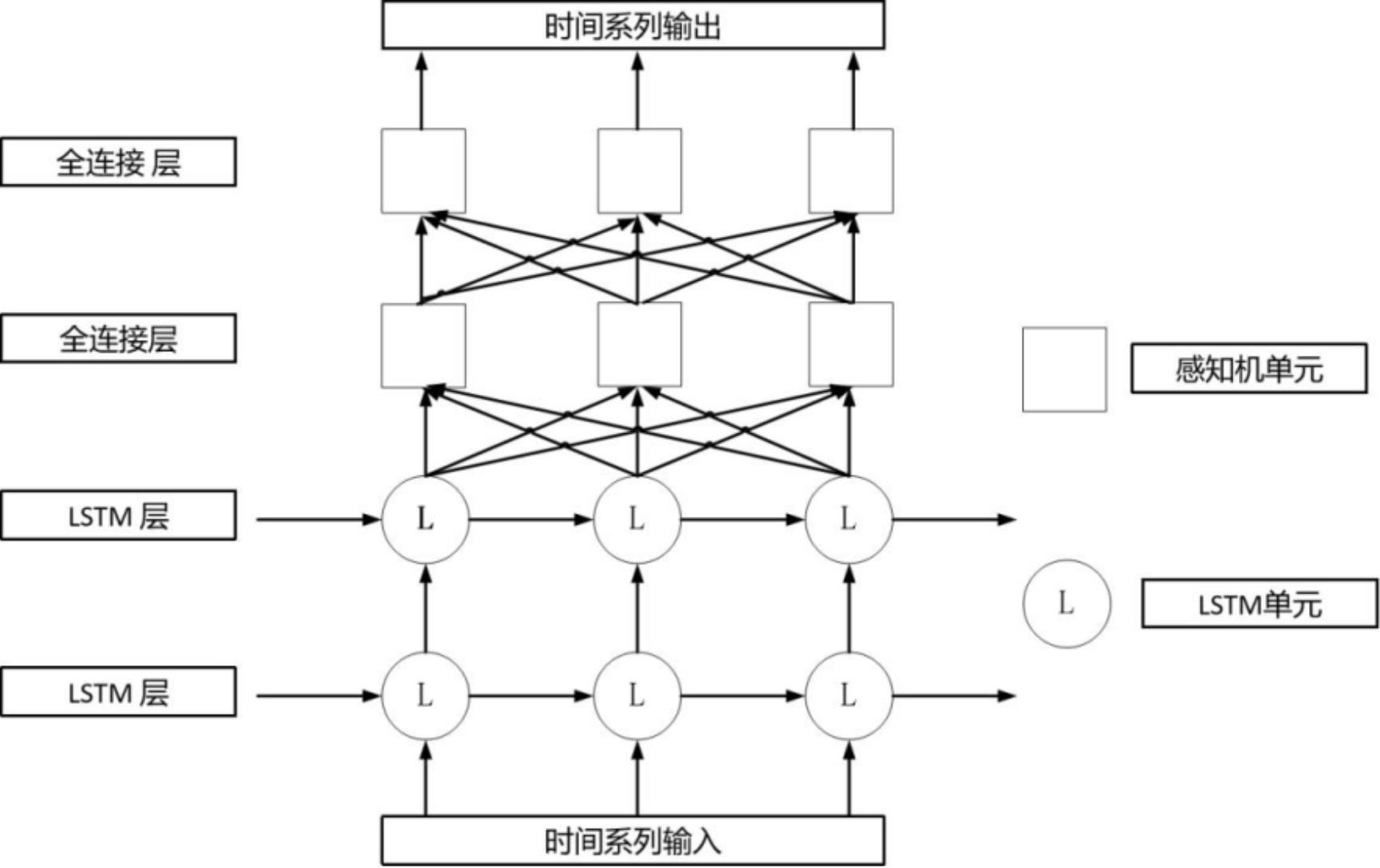
13、进一步的,步骤s4中构建lstm神经网络模型,基于lstm cell 和感知机单元simple neural cell构建神经网络架构dnn(deep neural network),共包含2层循环神经网络lstm layer和两层全连接神经网络fc layer,每两层神经网络之间采用dropout进行正则化,提升神经网络的泛化能力,dropout的比例为0.2;
14、其中,lstm cell 设置了三个门限:输入门、遗忘门、输出门;表征长期记忆的细胞态;等待存入长期记忆的候选态:三个门限都是当前时刻的输入特征和上个时刻的短期记忆的函数,分别表示为:
15、输入门(门限):,决定了多少比例的信息会被存入当前细胞态;
16、遗忘门(门限):,将细胞态中的信息选择性的遗忘;
17、输出门(门限):,将细胞态中的信息选择性的进行输出;
18、三个公式中、和是待训练参数矩阵,、和是待训练偏置项;为sigmoid 激活函数,它可以使门限的范围在 0 到 1 之间;
19、为记忆体,表征短期记忆,是当前细胞态经过输出门得到的:记忆体(短期记忆):;
20、候选态表示归纳出的待存入细胞态的新知识,是当前时刻的输入特征和上个时刻的短期记忆的函数: 候选态(归纳出的新知识):=,wc是候选态权重矩阵,bc是候选态偏置项,是输入门;
21、细胞态表示长期记忆,它等于上个时刻的长期记忆通过遗忘门的值和当前时刻归纳出的新知识通过输入门的值之和: 细胞态(长期记忆):=。
22、进一步的,步骤s5具体为:对s4构建的深度神经网络进行训练,首先将s3中的仿真悬架位移量数据以及仿真轮心加速度数据分别进行归一化处理作为深度学习模型输入的原始数据;将s1中的实际测试的悬架位移数据进行归一化处理作为神经网络训练的输出的原始数据;将每个归一化后的仿真加速度,仿真位移,测试位移基于时间窗口进行分割,分割为多份得到的数据即为训练数据。
23、进一步的,所述时间窗口的长度为含有35个不同时间点的长度,35为超参数,不同的动力学系统该超参数不同,需要进行调优。
24、进一步的,2个lstm layer层和第一个fc layer的激活函数为relu,relu 函数定义为:当x>0,relu(x)=x,当x<=0,relu(x)=0,最后一个fc layer层的激活函数为线性激活函数linear;神经网络模型的训练为自主编程或采用成熟的深度学习框架如paddlepaddle,或者tensorflow或者华为的mindspore;将训练数据集拆分为训练集,验证集和测试集,对神经网络模型进行训练,其中,仿真位移数据以及仿真加速度数据归一化后加窗处理后的数据为dnn的输入,实测数据归一化后加窗处理后的数据为dnn的输出,输入输出所对应的时间窗口的时间相同。
25、进一步的,s6具体为将实际测量得到的悬架位移数据以及轮心加速度数据经过归一化加滑动窗口分割为指定长度后,输入dnn则可输出整车四个车轮轮心垂向位移激励。
26、进一步的,s7:整车载荷分解,将s6得到的轮心垂向位移激励及s1中测量得到的轮心除垂向力外的5分力施加于多体动力学模型,将各个零部件连接点的载荷输出,即为零部件的实际道路载荷谱。
27、本发明基于lstm循环神经网络来进行整车载荷分解,效率远高于基于虚拟迭代法,实现周期缩短及成本降低。
- 还没有人留言评论。精彩留言会获得点赞!