一种基于坐标系转换的着陆器软着陆动态模型构建方法
本发明属于腿式星球着陆器,具体的,涉及基于坐标系转换的着陆器软着陆动态模型构建方法。
背景技术:
1、腿式着陆器因其着陆性能可靠性高、结构形式简单、着陆稳定好等诸多优势,广泛应用于星面软着陆领域,如我国的嫦娥系列探月球着陆器、火星探测天问一号着陆器和垂直起降运载器。着陆器软着陆模型是研究着陆器软着陆性能以及优化设计的重要方法,其模型的合理性且完备性直接决定着陆器软着陆模型可信度。因此,如何构建合理且完备的着陆器软着陆动态模型是一项关键技术。在着陆器软着陆动力学模型建模上,目前对软着陆动力学的研究多采用二维模型建立模型,其应用受到限制,无法表达空间着陆器的全貌运动形式。尽管已经开发了一些三维运动模型,但是这些建模方法的可扩展性和可用性略有不足,使得它们不能更好地支持未来的研究。此外,当前的软着陆模型一般采用固定坐标系进行运算,固定坐标系虽然可以直接表明各点的位置关系,但对于需要借助旋转角度进行分析的着陆器各部件结构的内部行为时,运算复杂度高,缺少形象直观的解决方案。
技术实现思路
1、为更好表达着陆器各结构间的相互关系,采用欧拉旋转角形式表达着陆器结构件容易表征,因此本发明请求保护基于坐标系转化的着陆器软着陆动态模型构建方法。
2、根据本发明第一方面,本发明请求保护基于坐标系转换的着陆器动态着陆模型构建方法,其特征在于,包括:
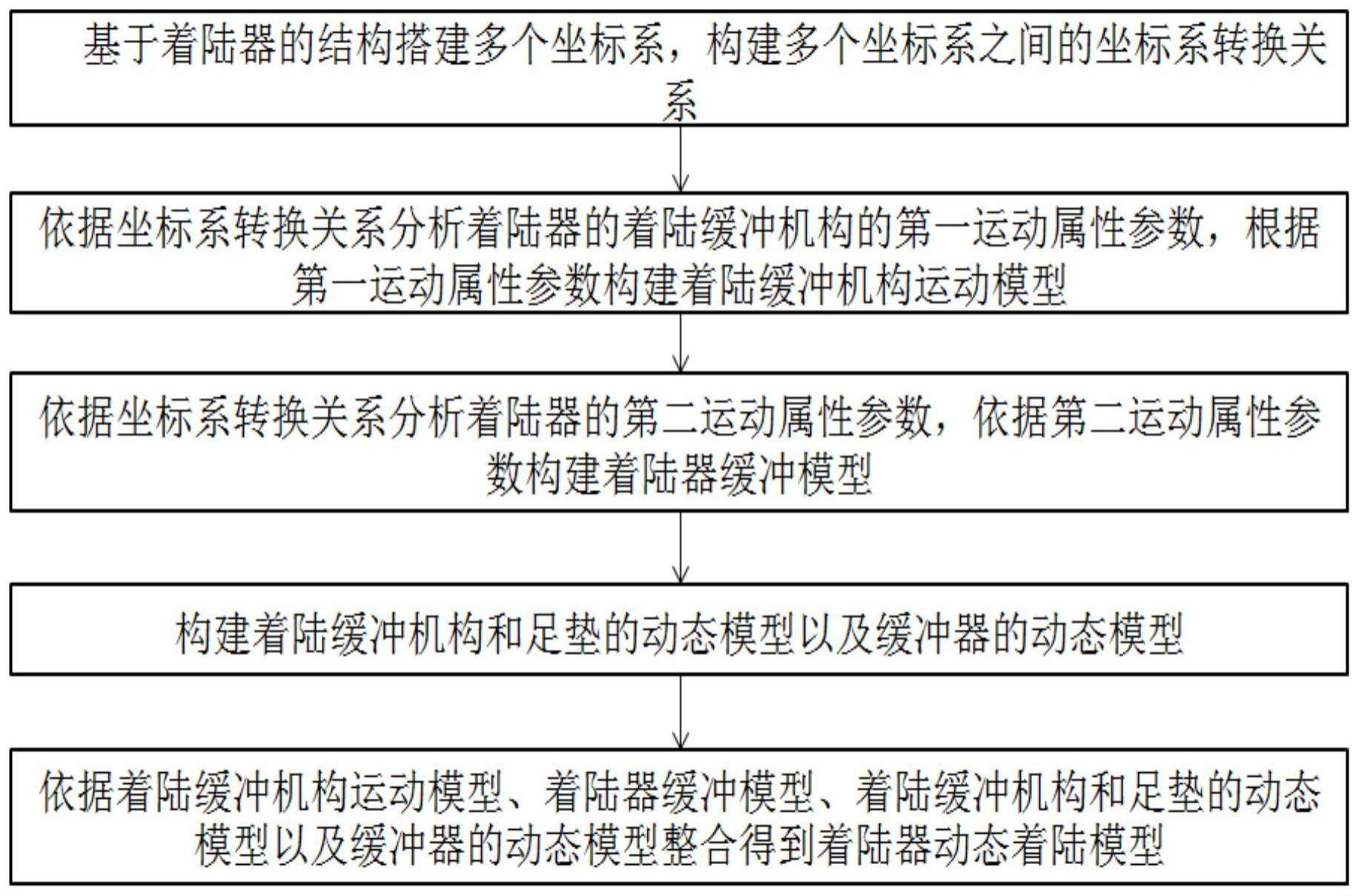
3、基于所述着陆器的结构搭建多个坐标系,构建所述多个坐标系之间的坐标系转换关系;
4、依据所述坐标系转换关系分析所述着陆器的着陆缓冲机构的第一运动属性参数,根据所述第一运动属性参数构建着陆缓冲机构运动模型;
5、依据所述坐标系转换关系分析所述着陆器的第二运动属性参数,依据所述第二运动属性参数构建着陆器缓冲模型;
6、构建着陆缓冲机构和足垫的动态模型以及缓冲器的动态模型;
7、依据所述着陆缓冲机构运动模型、着陆器缓冲模型、着陆缓冲机构和足垫的动态模型以及缓冲器的动态模型整合得到着陆器动态着陆模型。
8、进一步的,所述着陆器的结构包括:
9、着陆器舱体和四个着陆缓冲机构,每个所述着陆缓冲机构包括由三个缓冲支柱组成,分别为1个主缓冲支柱和2个副缓冲支柱;
10、所述副缓冲支柱包括第一副缓冲支柱、第二副缓冲支柱
11、所述主缓冲支柱和副缓冲支柱具有外筒和内筒,内外筒发生相对滑动实现支柱的伸张和缩短;
12、所述主缓冲支柱上具有吸收压缩过程中能量的吸收缓冲器与足垫,副缓冲支柱上具有吸收拉伸和压缩过程中能量的伸缩缓冲器;
13、每个缓冲机构上具有缓冲器;
14、足垫采用轻质结构,结构外层为轻质蒙皮,内部为泡沫铝和铝蜂窝材料为支撑结构。
15、进一步的,所述基于所述着陆器的结构搭建多个坐标系,至少包括:
16、所述多个坐标系包括着陆器软着陆全局坐标系、月面局部坐标系、各着陆缓冲机构坐标系、着陆器本体坐标系、主副缓冲支柱坐标系;
17、所述着陆器软着陆全局坐标系为所述着陆器的全局参照坐标系,用于表达着陆器在空间中位姿、以及着陆器空间运动速度;
18、所述月面局部坐标系为基于所述着陆器着陆地面的位置与角度构建的坐标系,所述足垫的触地点作为所述月面局部坐标系的坐标原点,同时该坐标系表达出局部着陆区域下的凹坑和突起;
19、所述各着陆缓冲机构坐标系相对于着陆器本体坐标系沿z轴旋转π/2*(n-1)角度获得,所述着陆缓冲机构坐标系和着陆器本体坐标系的坐标原点为所述着陆器的几何中心点;
20、所述着陆器本体坐标系表示所述着陆器的结构分布与质心偏置状态,所述着陆器本体坐标系的坐标原点为所述着陆器的几何中心点;
21、所述主缓冲支柱与所述着陆器主体连接点为第一连接点;
22、所述主副缓冲支柱坐标系表示所述主缓冲支柱的相对位置,所述主副缓冲支柱坐标系的坐标原点为所述主缓冲支柱与所述着陆器舱体的第一连接点或第一、第二辅助缓冲支柱与所述着陆器主体连接点分别,分别为第二、第三连接点;
23、所述第一副缓冲支柱与主缓冲支柱具有第四连接点,所述第二副缓冲支柱与主缓冲支柱具有第五连接点,所述主缓冲支柱与足垫连接点为第六连接点。其中第四连接点和第五连接点为约束连接点,利用约束连接关系,建立着陆缓冲机构坐标下各支柱长度与第六连接点的位置的映射关系,用于着陆缓冲机构动力学模型建模过程。
24、进一步的,所述构建所述多个坐标系之间的坐标系转换关系,具体包括:
25、按照z-y-x欧拉角旋转形式,分别获得在上一个坐标系到下一个坐标系下的偏航角度、俯仰和滚转角度,按照z-y-x欧拉角旋转矩阵计算公式,获得各个坐标系之间的旋转矩阵;获取依据坐标系原点获取两坐标系之间的平移矩阵,其中若按照上一个坐标系的空间方位偏置,其计算平移矩阵应左乘旋转矩阵;
26、若按照下一个坐标系的空间方位偏置,其计算平移矩阵应右乘旋转矩阵。
27、进一步的,依据所述坐标系转换关系分析所述着陆器的着陆缓冲机构的第一运动属性参数,根据所述第一运动属性参数构建着陆缓冲机构运动模型,具体包括:
28、所述第一运动属性参数指着陆器舱体相关的几何点的位置,至少包括着陆器舱体质心、几何中心以及与各缓冲支柱的安装位置点;
29、所述第二运动属性参数指相应着陆缓冲机构上的位置,至少包括第六连接点、第四连接点、第五连接点;
30、依据全局坐标系和着陆缓冲机构坐标系之间的坐标系转换关系,得到全局坐标系下和着陆缓冲机构坐标系下的着陆器几何中心点、着陆器质心点、第一连接点、第二连接点的坐标向量;
31、依据所述着陆缓冲机构坐标系的平移向量设置所述着陆缓冲机构结构的第一安装属性参数,依据所述着陆缓冲机构坐标系下主缓冲支柱的偏航角度和倾斜角度设置所述着陆缓冲机构结构的第二安装属性参数;
32、在所述全局坐标系下依据jacobian矩阵与广义坐标速率,计算着陆器质心、第二连接点、第四连接点、第三连接点的运动速度;
33、在所述着陆缓冲机构坐标系下依据jacobian矩阵与广义坐标速率,计算第二连接点的运动速度;
34、在所述全局坐标系下依据海森和jacobian矩阵与广义坐标下的速度和加速度,计算着陆器质心、第二连接点、第四连接点、第三连接点的运动加速度;
35、在所述着陆缓冲机构坐标系下依据hessian和jacobian矩阵与广义坐标下的速度和加速度,计算第二连接点的运动加速度;
36、根据虚功原理,依据jacobian矩阵,获得着陆缓冲机构等效动态载荷。
37、进一步的,所述依据所述坐标系转换关系分析所述着陆器的第二运动属性参数,依据所述第二运动属性参数构建着陆器缓冲模型时,依据六度自由模型,使用十二状态变量得到,具体包括:
38、依据着陆器本体坐标系下的着陆器转动惯量,得到着陆器的平移加速度向量和旋转角加速度向量;
39、获取所述主缓冲支柱和副缓冲支柱的压溃力,计算得到所述缓冲支柱的传导力;
40、依据所述传导力,得出所述着陆缓冲机构的缓冲力;
41、获取所述着陆器的重力、引擎推力、缓冲力,分析得出所述着陆器的着陆合力;
42、依据所述着陆器的着陆合力、平移加速度向量和旋转角加速度向量构建着陆器缓冲模型。
43、本发明请求保护基于坐标系转换的着陆器软着陆动态模型构建方法,基于着陆器结构特征、着陆星表特征、着陆重力场特征,构建多组坐标系之间的坐标系转化关系;依据坐标系转化关系分别建立着陆器偏置质心点和舱体其他位置点、各着陆缓冲机构的着陆运动学特征;依据空间坐标系的位置模型,建立相应的坐标点的雅可比矩阵和海森矩阵,获着陆器偏置质心点和舱体其他位置点、各着陆缓冲机构的着陆运动学特征;利用位移、速度和加速度计算模型,构建出整个着陆器不同位置的动态响应特征。本发明充分考虑不同姿态下的着陆器各部件的特征,将不同位置和角度的着陆器中的各部件的动态响应特征集成在一个系统模型中,有效提高了着陆器模型构建效率和准确度。
- 还没有人留言评论。精彩留言会获得点赞!