一种用于医学成像中的生成对象的三维模型的系统的制作方法
本技术涉及医学成像,特别涉及用于医学成像中的生成对象的三维(3d)模型、确定医学成像中的感兴趣区域(roi)位置的系统和方法。
背景技术:
1、近年来,医学成像技术已广泛用于临床检查和医学诊断。当使用医学成像设备进行扫描时,操作员(例如,医生、技术人员等)需要确定待扫描的患者的roi的位置。roi的位置可以由操作员借助于患者的预扫描图像来确定。对患者进行预扫描需要操作员花费额外的时间和精力。医学成像流程的效率可能会降低。此外,对患者进行预扫描可能对患者造成额外和不必要的辐射。因此,期望开发一种可以高效确定医学成像扫描的患者的roi的系统和方法。
技术实现思路
1、根据本技术的一方面,提供了一种用于确定医学成像中的roi的系统。所述系统可以包括存储一组指令的存储设备,以及与所述存储设备通信的至少一个处理器。当执行一个指令时,至少一个处理器可以被配置为使系统从配置有至少两个位置传感器的柔性设备,接收与对象的身体轮廓相对于支撑物的相关的第一位置信息。所述柔性设备可以被配置为适应所述对象的所述身体轮廓。所述支撑物可以被配置为支撑所述对象。至少一个处理器可以使系统基于所述第一位置信息,生成所述对象的三维(3d)模型。至少一个处理器还可以使系统基于所述对象的所述三维模型,确定所述对象的roi。
2、在一些实施例中,所述柔性设备可以包括以阵列形式排列的至少两个单元。所述至少两个单元中的每个单元可以包括所述至少两个位置传感器中的一个或以上位置传感器。所述至少两个单元中的每对相邻单元可以通过柔性接头相互连接。
3、在一些实施例中,所述至少两个单元中的一个单元可以包括覆盖所述单元的所述一个或以上位置传感器的第一层。
4、在一些实施例中,所述至少两个单元中的所述单元还可以包括第二层。所述单元的所述一个或以上位置传感器可以被夹在所述第一层和所述第二层之间。
5、在一些实施例中,第一层或第二层中的至少一层可以由人造纤维和植物纤维的混合物制成。
6、在一些实施例中,为了确定对象的roi,可以进一步配置至少一个处理器,以使系统基于所述对象的所述三维模型确定所述roi在所述对象内部的位置。所述至少一个处理器还可以使所述系统获取所述对象相对于成像设备的相关的第二位置信息。至少一个处理器可以基于所述roi在所述对象内部的所述位置和所述第二位置信息,确定所述对象的所述roi。
7、在一些实施例中,第二信息的至少一部分可以从图像获取设备或配置在所述支撑物中的至少两个压力传感器获取的。
8、在一些实施例中,为了确定roi在对象内部的位置,至少一个处理器可以被配置为使系统获取与所述对象的热分布相关的信息。所述至少一个处理器还可以基于所述对象的所述三维模型和与所述对象的热分布相关的所述信息确定所述roi在所述对象内部的位置。
9、在一些实施例中,所述柔性设备或所述支撑物中的至少一个可以包括一个或以上热传感器,以及与所述对象热分布相关的所述信息的至少一部分可以是从所述一个或以上热传感器获取的。
10、在一些实施例中,为了确定roi在对象内部的位置,可以配置至少一个处理器,以使系统获取与所述对象相关的生理数据,并且获取与所述对象相关的解剖信息。所述至少一个处理器还可以基于所述对象的所述三维模型、与所述对象相关的所述生理数据和所述解剖信息,确定所述roi在所述对象内部的位置。
11、在一些实施例中,与所述对象相关的所述解剖信息可以包括所述对象的历史解剖信息或与所述对象相关的一个或以上参考样本中的解剖信息中的至少一种。
12、在一些实施例中,所述生理数据的至少一部分可以是从所述支撑物获取的或基于所述对象的所述三维模型确定的。
13、在一些实施例中,柔性设备可以是穿戴式设备。
14、根据本技术的另一方面,提供了一种用于确定医学成像中的roi的系统。所述系统可以包括存储一组指令的存储设备,以及与所述存储设备通信的至少一个处理器。当执行该指令时,至少一个处理器可以被配置为使所述系统接收由投影仪投射到对象上的结构光的一个或以上图像。至少一个处理器可以基于投射到所述对象上的所述结构光的所述一个或以上图像生成所述对象的三维模型。至少一个处理器还可以基于所述对象的所述三维模型,确定所述对象的roi。
15、在一些实施例中,所述结构光可以是结构光斑、结构光带或结构光网格中的至少一种。
16、在一些实施例中,所述结构光的所述一个或以上图像可以是从图像采集设备接收的。所述成像设备还可以包括可延长杆。所述可延长杆可以被配置为控制所述图像采集设备或所述投影仪中的至少一个的位置。
17、在一些实施例中,投影仪还可以包括排列成弧形的至少两个子投影仪。所述至少两个子投影仪中的每个子投影仪可以被配置为将所述结构光的至少一部分投影至所述对象上。
18、在一些实施例中,所述结构光的所述一个或以上图像可以是从图像采集设备接收的。所述图像采集设备还可以包括至少两个呈弧形排列的子图像采集设备。所述至少两个子图像采集设备中的每个子图像采集设备可以被配置为采集所述结构光的所述一个或以上图像之一。
19、根据本技术的又一方面,提供了一种用于确定roi的系统。所述系统可以包括存储一组指令的存储设备,以及与所述存储设备通信的至少一个处理器。当执行一个指令时,至少一个处理器可能被配置为使系统接收从对象的身体轮廓到光脉冲生成器的距离信息。所述距离信息可以是基于与所述光脉冲生成器向所述对象发射的光脉冲相关的飞行时间(tof)信息确定的。至少一个处理器可以使系统基于所述tof信息,生成所述对象的三维模型。至少一个处理器可以使系统基于所述对象的所述三维模型确定所述对象的roi。
20、在一些实施例中,所述光脉冲发生器可以向所述对象发射所述光脉冲时,所述光脉冲发生器可以在运动。所述光脉冲发生器的所述运动可以由所述成像设备中的可延长杆控制。
21、在一些实施例中,光脉冲发生器可以进一步包括排列成弧形的至少两个子光脉冲发生器。至少两个子光脉冲发生器中的每个子光脉冲发生器可以被配置为向对象发射光脉冲的至少一部分。
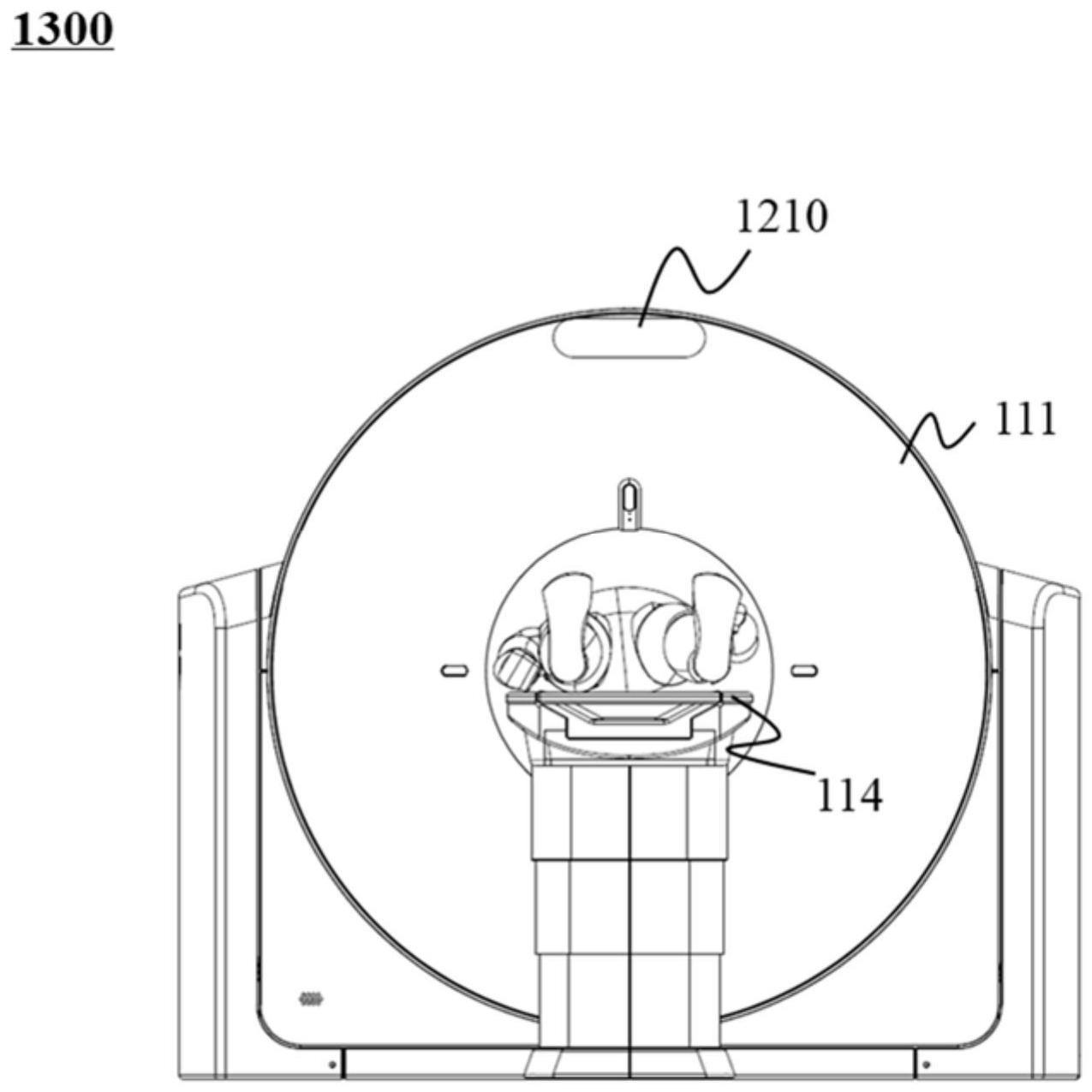
22、根据本技术的又一方面,提供了一种用于医学成像中的生成对象的三维(3d)模型的系统,包括:存储设备,存储一组指令;以及至少一个处理器,与所述至少一个存储介质通信,其中,当执行所述指令时,所述至少一个处理器被配置为使所述系统:获取通过信息获取组件得到的与对象相关的目标信息,其中:所述对象由扫描台支撑;所述信息获取组件被配置为安装在医学成像设备的机架上,并且通过可延长杆控制所述信息获取组件的位置,其中所述可延长杆被配置为驱动所述信息获取组件从所述机架延伸以获取与所述目标信息的至少一部分或缩回所述机架;基于所述目标信息,生成所述对象的三维(3d)模型。
23、在一些实施例中,所述目标信息包括以下中的至少一种:投射到所述对象上的结构光的一个或以上图像、与向所述对象发射的光脉冲相关的飞行时间(tof)信息。
24、在一些实施例中,所述信息获取组件包括图像采集设备和投影仪;以及所述结构光是由所述投影仪投射到所述对象上的,所述结构光的所述一个或以上图像从所述图像采集设备接收的。
25、在一些实施例中,所述信息获取组件包括光脉冲传感器和光脉冲生成器;以及所述光脉冲是由所述光脉冲生成器向所述对象发射的,所述飞行时间(tof)信息是基于由所述光脉冲传感器检测由所述对象反射的光脉冲得到的。
26、在一些实施例中,所述光脉冲传感器还包括至少两个光脉冲传感器,并且所述至少两个光脉冲传感器中的每个光脉冲被配置成检测由所述对象反射的光脉冲的至少一部分。
27、在一些实施例中,所述可延长杆与所述机架或安装在所述机架上的容器连接。
28、在一些实施例中,所述信息获取组件完全缩回时位于所述机架内或安装在所述机架上的所述容器内。
29、在一些实施例中,所述医学成像设备还包括安装在机架上或所述容器上的盖子,所述盖子被配置为当所述信息获取组件完全缩回时覆盖所述信息获取组件和当所述可延长杆驱动所述信息获取组件从所述机架延伸时被抬起。
30、在一些实施例中,所述扫描台被配置为根据指令进行位置移动;以及所述信息获取组件被配置为在所述扫描台的移动期间连续地或周期性地获取与所述对象相关的所述目标信息。
31、在一些实施例中,所述至少一个处理器还被配置为使所述系统:基于所述三维(3d)模型,确定所述对象的感兴趣区域。
32、本技术的一部分附加特性可以在下面的描述中进行说明。通过对以下描述和对应附图的研究或者对实施例的生产或操作的了解,本技术的一部分附加特性对于本领域技术人员是明显的。本技术的特征可以通过对以下描述的具体实施例的各种方面的方法、手段和组合的实践或使用得以实现和达到。
- 还没有人留言评论。精彩留言会获得点赞!