堆状物料体积识别方法、装置、电子设备及存储介质与流程
本发明实施例涉及物料体积测量,尤其涉及一种堆状物料体积识别方法、装置、电子设备及存储介质。
背景技术:
1、目前针对料仓中堆状物料的体积识别往往采用人工测算的方式。物料仓库存放的面积大、料堆表面不平,采用人为划定高度线,人为丈量,凭借经验粗略估算。这种方式存在工作量大、耗费人力、测量误差大、测量时间长的问题,不利于料仓物料管理统计工作。
技术实现思路
1、鉴于此,为解决上述技术问题或部分技术问题,本发明实施例提供一种堆状物料体积识别方法、装置、电子设备及存储介质。
2、第一方面,本发明实施例提供一种堆状物料体积识别方法,包括:
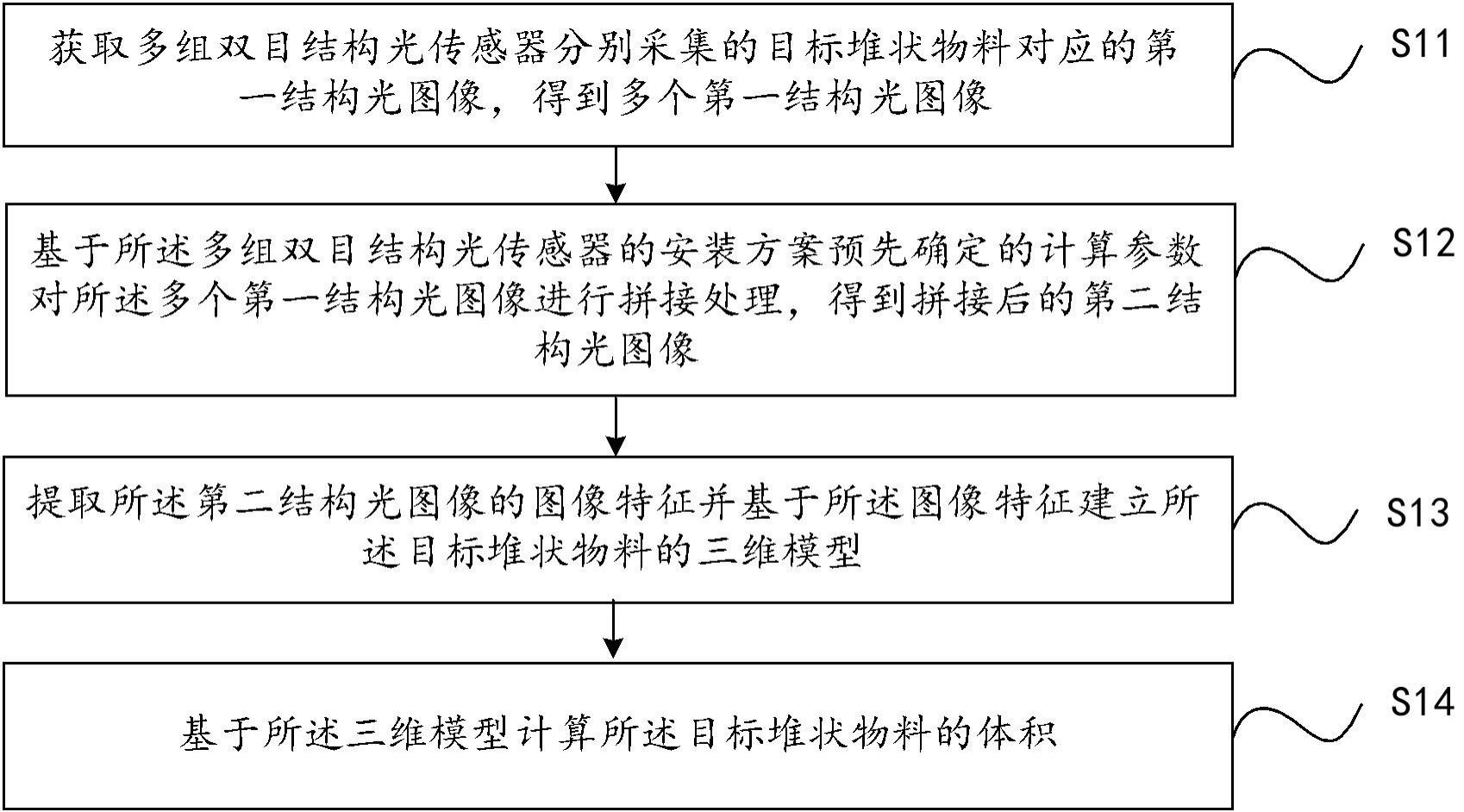
3、获取多组双目结构光传感器分别采集的目标堆状物料对应的第一结构光图像,得到多个第一结构光图像;
4、基于所述多组双目结构光传感器的安装方案预先确定的计算参数对所述多个第一结构光图像进行拼接处理,得到拼接后的第二结构光图像;
5、提取所述第二结构光图像的图像特征并基于所述图像特征建立所述目标堆状物料的三维模型;
6、基于所述三维模型计算所述目标堆状物料的体积。
7、在一个可能的实施方式中,所述方法还包括:
8、向每个双目结构光传感器下发图片采集指令,以使每个双目结构光传感器响应所述图片采集指令通过发射ir光线扫描对应的覆盖区域并拍摄所述覆盖区域的照片,得到所述目标堆状物料对应的多个第一结构光图像。
9、在一个可能的实施方式中,所述方法还包括:
10、对所述多个第一结构光图像进行点云数据配准,确定每相邻的两个第一结构光图像之间的重叠度;
11、基于所述重叠度确定每相邻的两个第一光结构图像的待裁剪区域;
12、通过预设的图像处理程序将每相邻的两个第一光结构图像的待裁剪区域裁剪掉,并将裁剪后的多个第一结构光图像进行拼接处理,得到拼接后的第二结构光图像。
13、在一个可能的实施方式中,所述方法还包括:
14、通过角点检测算法检测每相邻的两个第一结构光图像的有效匹配点以及两个第一结构光图像的总角点数;
15、将所述有效匹配点与所述总角点数的商值作为每相邻的两个第一结构光图像之间的重叠度。
16、在一个可能的实施方式中,所述方法还包括:
17、提取所述第二结构光图像中每个像素点的深度信息;
18、基于所述深度信息,确定每个像素点对应的摄像头镜头到所述目标堆状物料的表面的第一距离信息;
19、基于所述第一距离信息建立所述目标堆状物料的三维模型。
20、在一个可能的实施方式中,所述方法还包括:
21、将所述三维模型分割成多个立方体并计算每个立方体的体积;
22、将计算得到的每个立方体的体积之和作为所述目标堆状物料的体积。
23、在一个可能的实施方式中,所述方法还包括:
24、将每组双目结构光传感器的摄像头镜头正下方的像素点作为中心点;
25、获取所述中心点到存放所述目标堆状物料的料仓底部的高度信息、所述中心点到其他每个像素点的第二距离信息以及所述中心点到其他每个像素点对应的夹角信息;
26、基于所述高度信息、第二距离信息和夹角信息确定其他每个像素点到存放所述目标堆状物料的料仓底部的深度信息。
27、第二方面,本发明实施例提供一种堆状物料体积识别装置,包括:
28、获取模块,用于获取多组双目结构光传感器分别采集的目标堆状物料对应的第一结构光图像,得到多个第一结构光图像;
29、处理模块,用于基于所述多组双目结构光传感器的安装方案预先确定的计算参数对所述多个第一结构光图像进行拼接处理,得到拼接后的第二结构光图像;
30、建立模块,用于提取所述第二结构光图像的图像特征并基于所述图像特征建立所述目标堆状物料的三维模型;
31、识别模块,用于基于所述三维模型计算所述目标堆状物料的体积。
32、第三方面,本发明实施例提供一种电子设备,包括:处理器和存储器,所述处理器用于执行所述存储器中存储的堆状物料体积识别程序,以实现上述第一方面中所述的堆状物料体积识别方法。
33、第四方面,本发明实施例提供一种存储介质,包括:所述存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现上述第一方面中所述的堆状物料体积识别方法。
34、本发明实施例提供的堆状物料体积识别方案,通过获取多组双目结构光传感器分别采集的目标堆状物料对应的第一结构光图像,得到多个第一结构光图像;基于所述多组双目结构光传感器的安装方案预先确定的计算参数对所述多个第一结构光图像进行拼接处理,得到拼接后的第二结构光图像;提取所述第二结构光图像的图像特征并基于所述图像特征建立所述目标堆状物料的三维模型;基于所述三维模型计算所述目标堆状物料的体积。相比于现有的人工测算物料体积出现的工作量大、耗费人力、测量误差大、测量时间长的问题,由本方案,基于多组双目结构光传感器对堆状物料进行体积识别,能够快速、准确、适应识别任意大小料仓的堆状物料的体积,减少人力成本。
技术特征:
1.一种堆状物料体积识别方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述获取多组双目结构光传感器分别采集的目标堆状物料对应的第一结构光图像,得到多个第一结构光图像,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述多组双目结构光传感器的安装方案预先确定的计算参数对所述多个第一结构光图像进行拼接处理,得到拼接后的第二结构光图像,包括:
4.根据权利要求3所述的方法,其特征在于,所述对所述多个第一结构光图像进行点云数据配准,确定每相邻的两个第一结构光图像之间的重叠度,包括:
5.根据权利要求3所述的方法,其特征在于,所述提取所述第二结构光图像的图像特征并基于所述图像特征建立所述目标堆状物料的三维模型,包括:
6.根据权利要求5所述的方法,其特征在于,所述基于所述三维模型计算所述目标堆状物料的体积,包括:
7.根据权利要求5所述的方法,其特征在于,所述提取所述第二结构光图像中每个像素点的深度信息,包括:
8.一种堆状物料体积识别装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:处理器和存储器,所述处理器用于执行所述存储器中存储的堆状物料体积识别程序,以实现权利要求1~7中任一项所述的堆状物料体积识别方法。
10.一种存储介质,其特征在于,所述存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现权利要求1~7中任一项所述的堆状物料体积识别方法。
技术总结
本发明实施例涉及一种堆状物料体积识别方法、装置、电子设备及存储介质,包括:获取多组双目结构光传感器分别采集的目标堆状物料对应的第一结构光图像,得到多个第一结构光图像;基于所述多组双目结构光传感器的安装方案预先确定的计算参数对所述多个第一结构光图像进行拼接处理,得到拼接后的第二结构光图像;提取所述第二结构光图像的图像特征并基于所述图像特征建立所述目标堆状物料的三维模型;基于所述三维模型计算所述目标堆状物料的体积。由此,基于多组双目结构光传感器对堆状物料进行体积识别,能够快速、准确、适应识别任意大小料仓的堆状物料的体积,减少人力成本。
技术研发人员:赵忠杨,李鑫玉,魏树臣,邓波,常红宾,侯绪彬,刘壮壮
受保护的技术使用者:中建八局第一数字科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!