一种基于神经视觉网络的路面检测方法及装置与流程
本技术是关于神经网络,特别是关于一种基于神经视觉网络的路面检测方法及装置。
背景技术:
1、随着神经网络技术的发展,神经视觉网络也随之发展。神经视觉网络属于神经网络模型的一种,其能够实现对象识别、对象分类等功能。
2、在交通领域中,为了保证路面的稳定且安全的使用,需要经常对路面进行维护,路面的维护可以基于路面的检测实现。针对路面的检测,可以检测路面的破损度,若路面破损度较高,需要对路面进行维修。目前,路面的检测方案,虽然可以基于神经网络模型实现;但是,路面检测结果的准确性难以得到保证。
技术实现思路
1、本技术的目的在于提供一种基于神经视觉网络的路面检测方法及装置,其能够实现准确且有效的路面检测。
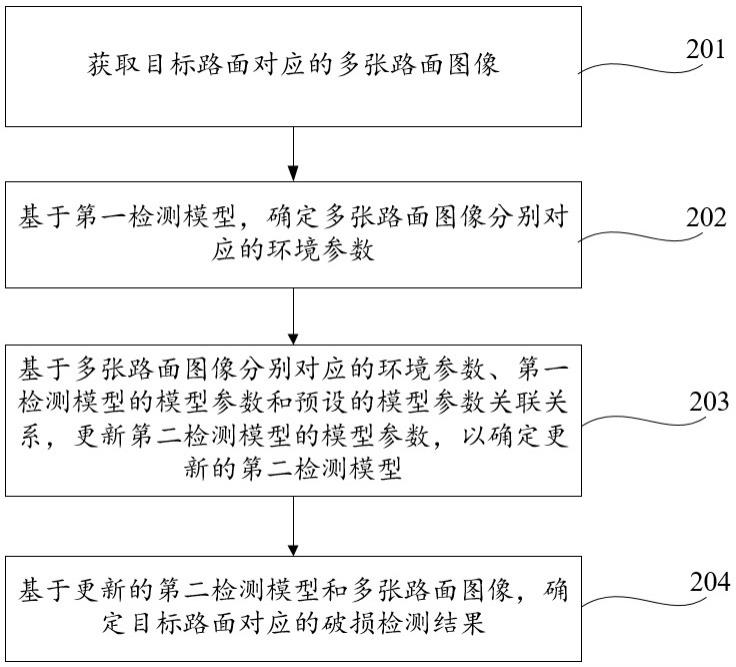
2、为实现上述目的,本技术的实施例提供了一种基于神经视觉网络的路面检测方法,包括:获取目标路面对应的多张路面图像;基于第一检测模型,确定所述多张路面图像分别对应的环境参数;其中,所述第一检测模型为基于神经视觉网络的模型;基于所述多张路面图像分别对应的环境参数、所述第一检测模型的模型参数和预设的模型参数关联关系,更新第二检测模型的模型参数,以确定更新的第二检测模型;其中,所述第二检测模型对应有初始模型参数,所述预设的模型参数关联关系用于表征所述第一检测模型的模型参数、所述第二检测模型的模型参数以及环境参数之间的关联关系;基于更新的第二检测模型和所述多张路面图像,确定所述目标路面对应的破损检测结果。
3、在一种可能的实施方式中,所述获取目标路面对应的多张路面图像,包括:确定所述目标路面的路面信息;所述路面信息包括:路面材料、路面使用频率和路面维护频率中的至少一项信息;基于所述目标路面的路面信息,确定所述多张路面图像的采集策略;所述采集策略包括:图像采集周期、图像采集数量和图像质量中的至少一项信息;基于所述采集策略,采集所述目标路面对应的多张路面图像。
4、在一种可能的实施方式中,所述基于所述目标路面的路面信息,确定所述多张路面图像的采集策略,包括:基于所述路面使用频率和预设的第一关联关系,确定所述图像采集周期;其中,所述第一关联关系用于表征路面使用频率和图像采集周期之间的关联关系;基于所述路面维护频率、所述路面使用频率和预设的第二关联关系,确定所述图像采集数量;其中,所述第二关联关系用于表征路面维护频率、路面使用频率和图像采集数量之间的关联关系;基于所述路面材料和预设的第三关联关系,确定所述图像质量;其中,所述第三关联关系用于表征路面材料和图像质量之间的关联关系。
5、在一种可能的实施方式中,所述基于神经视觉网络的路面检测方法还包括:获取第一训练数据集;其中,所述第一训练数据集中包括多张样本路面图像,所述多张样本路面图像分别对应有环境参数标签;根据所述第一训练数据集,对初始的第一检测模型进行训练,获得所述第一检测模型;其中,所述初始的第一检测模型的初始模型参数基于所述第二检测模型的初始模型参数确定。
6、在一种可能的实施方式中,所述基于神经视觉网络的路面检测方法还包括:根据第一测试数据集,确定所述第一检测模型的模型精度;所述第一测试数据集中包括多张测试路面图像,所述多张测试路面图像分别对应有环境参数标签;根据第二测试数据集,确定所述第二检测模型的模型精度;所述第二测试数据集中包括所述多张测试路面图像,所述多张测试路面图像分别对应有破损检测结果标签;根据所述第一检测模型的精度、所述第二检测模型的精度、所述多张测试路面图像分别对应的环境参数标签和破损检测结果标签,确定所述预设的模型参数关联关系。
7、在一种可能的实施方式中,所述根据所述第一检测模型的精度、所述第二检测模型的精度和所述多张测试路面图像分别对应的环境参数标签和破损检测结果标签,确定所述预设的模型参数关联关系,包括:若所述第一检测模型的精度大于或者等于所述第二检测模型的精度,确定所述多张测试路面图像分别对应的环境参数标签对所述多张测试路面图像分别对应的破损检测结果标签的第一影响值;基于所述第一影响值,确定环境参数对所述第二检测模型的模型参数的第一影响权重;基于所述第一检测模型的精度与所述第二检测模型的精度之间的精度差值确定第二影响权重;基于所述第一影响权重和所述第二影响权重,确定所述多张测试路面图像分别对应的环境参数标签的影响权重值;根据所述影响权重值和所述多张测试路面图像分别对应的环境参数标签,确定所述预设的模型参数关联关系。
8、在一种可能的实施方式中,所述根据所述第一检测模型的精度、所述第二检测模型的精度和所述多张测试路面图像分别对应的环境参数标签和破损检测结果标签,确定所述预设的模型参数关联关系,包括:若所述第一检测模型的精度小于所述第二检测模型的精度,从所述多张测试路面图像分别对应的环境参数标签中,确定出目标环境参数标签;所述目标环境参数标签对应的测试路面图像的图像质量高于预设图像质量;确定所述目标环境参数标签对所述多张测试路面图像分别对应的破损检测结果标签的第二影响值;基于所述第二影响值,确定所述目标环境参数标签对所述第二检测模型的模型参数的第三影响权重;基于所述第一检测模型的精度与所述第二检测模型的精度之间的精度差值确定第四影响权重;基于所述第三影响权重和所述第四影响权重,确定所述目标环境参数标签的影响权重值;根据所述影响权重值和所述目标环境参数标签,确定所述预设的模型参数关联关系。
9、在一种可能的实施方式中,所述预设的模型参数关联关系中,包括多个环境参数,该多个环境参数分别对应有影响权重值,以及包括多个模型参数之间的关联关系;所述基于所述多张路面图像分别对应的环境参数、所述第一检测模型的模型参数和预设的模型参数关联关系,更新第二检测模型的模型参数,包括:确定所述多张路面图像分别对应的环境参数中的目标环境参数;所述目标环境参数在所述预设的模型关联关系中,存在匹配的环境参数;针对所述第一检测模型和所述第二检测模型中的相同模型参数,基于所述目标环境参数对应的影响权重值,更新所述第二检测模型中的对应模型参数;针对所述第一检测模型和所述第二检测模型中的不相同模型参数,基于所述目标环境参数对应的影响权重值,所述不相同模型参数之间的关联关系,更新所述第二检测模型的对应模型参数。
10、在一种可能的实施方式中,所述破损检测结果中包括破损信息,所述破损信息包括破损面积、破损程度和破损修复率中的至少一项信息,所述基于神经视觉网络的路面检测方法还包括:基于所述多张路面图像、所述多张路面图像分别对应的环境参数和所述破损信息,生成第二训练数据集;基于所述第二训练数据集,对初始的第三检测模型进行训练,获得训练好的第三检测模型;所述初始的第三检测模型的模型参数基于所述第一检测模型的模型参数和所述更新的第二检测模型的模型参数确定。
11、本技术的实施例还提供一种基于神经视觉网络的路面检测装置,包括:获取单元,用于获取目标路面对应的多张路面图像;处理单元,用于:基于第一检测模型,确定所述多张路面图像分别对应的环境参数;其中,所述第一检测模型为基于神经视觉网络的模型;基于所述多张路面图像分别对应的环境参数、所述第一检测模型的模型参数和预设的模型参数关联关系,更新第二检测模型的模型参数,以确定更新的第二检测模型;其中,所述第二检测模型对应有初始模型参数,所述预设的模型参数关联关系用于表征所述第一检测模型的模型参数、所述第二检测模型的模型参数以及环境参数之间的关联关系;基于更新的第二检测模型和所述多张路面图像,确定所述目标路面对应的破损检测结果。
12、与现有技术相比,本技术的实施例的基于神经视觉网络的路面检测方法及装置,在获取到需要检测的路面的路面图像之后,先确定这些路面图像对应的环境参数,基于这些环境参数,对用于检测路面破损的神经视觉网络的参数进行优化。则,该路面检测方案,不仅利用多层网络实现路面检测,多层网络的模型参数之间相互关联,且都与环境参数关联;因此,该路面检测方案不仅能够基于神经视觉网络实现路面的有效检测;还能够基于神经视觉网络之间的关联性,对神经视觉网络的模型参数进行优化,从而实现更为精准的路面检测。从而,该路面检测方案可以实现准确且有效的路面检测。
- 还没有人留言评论。精彩留言会获得点赞!