一种桥切视觉标定的方法及装置与流程
本发明涉及石材加工,尤其涉及一种桥切视觉标定的方法及装置。
背景技术:
1、在基于机器视觉的桥切加工场景中,通常包括以下四个步骤:台面上放置石材、拍摄石材图像、在电脑上将加工形状拖动到石材图像的任意位置,以及执行加工指令。在拍摄石材图像之前,往往需要对相机进行标定,以确保相机所采集到的石材图像能够真实地反映石材形状和石材在台面上的位置,从而使得生成的加工指令能够准确地从指定位置加工出所需要的形状。
2、目前,在桥切加工场景中,采用棋盘标定对相机进行标定,其一般流程为:在台面上放置标定棋盘、采集图像、检测角点、进行角点对位调整,再使用张学友标定方法计算相机的内外参数,利用内外参数对图像进行畸变矫正,但该方法需要能够覆盖台面的超大标定棋盘,对标定棋盘的加工精度要求高,成本高昂,且在台面上放置标定棋盘对台面的平整度要求高,需要多次人工移动刀头对点,现场实施繁琐效率低,且当光照不均时,角点检测容易出错,标定准确性得不到保证。
技术实现思路
1、本发明所要解决的技术问题是:本发明提供一种桥切视觉标定的方法及装置,提高标定的效率和准确性。
2、为了解决上述技术问题,本发明采用的技术方案为:
3、第一方面,本发明提供一种桥切视觉标定的方法及装置,包括:
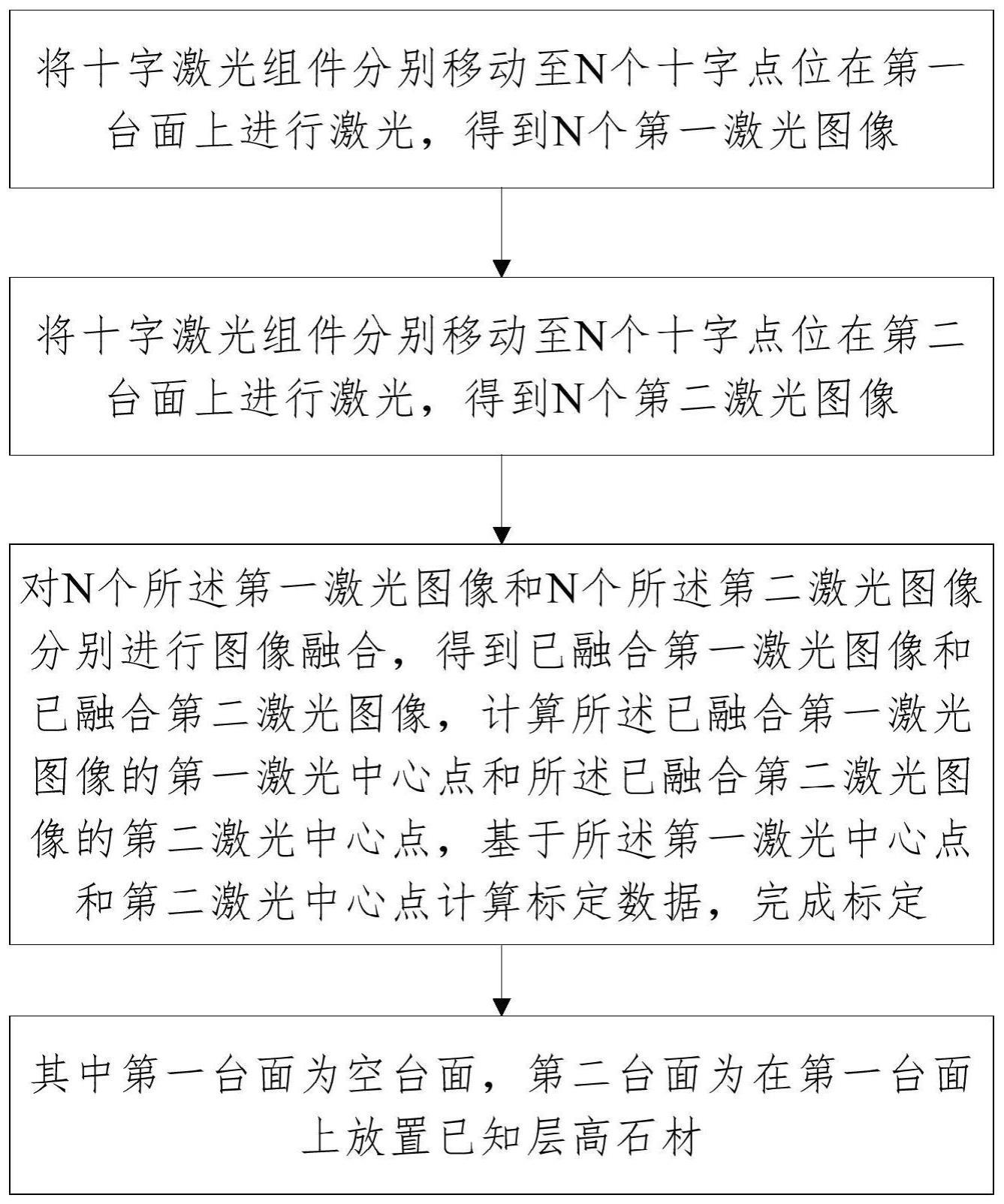
4、将十字激光组件分别移动至n个十字点位在第一台面上进行激光,得到n个第一激光图像;
5、将十字激光组件分别移动至n个十字点位在第二台面上进行激光,得到n个第二激光图像;
6、对n个所述第一激光图像和n个所述第二激光图像分别进行图像融合,得到已融合第一激光图像和已融合第二激光图像,计算所述已融合第一激光图像的第一激光中心点和所述已融合第二激光图像的第二激光中心点,基于所述第一激光中心点和第二激光中心点计算标定数据,完成标定;
7、其中第一台面为空台面,第二台面为在第一台面上放置已知层高石材。
8、本发明的有益效果在于:通过在空台面对n个十字点位进行激光和在已知层高石材对n个十字点位进行激光得到的第一激光图像和第二激光图像进行融合,计算融合后对应的第一激光中心点和第二激光中心点计算标定数据,克服传统棋盘标定需要人工进行刀头对点,简化了实施流程提高效率,且基于不同台面和多个激光图像多维度多角度计算标定数据,提高标定数据的准确性,另外无需定制超大标定棋盘,只需知道石材的层高即可进行标定,节约成本。
9、可选地,所述对n个所述第一激光图像和n个所述第二激光图像分别进行图像融合包括:
10、根据矫正公式分别计算每一个所述第一激光图像和每一个所述第二激光图像的矫正坐标:
11、offset=(src(i,j)-center)2*norm
12、rmul=scale*(1.0+offset*sq+offset2*qd)
13、dst(x,y)=center+rmul*offset
14、其中,dst(x,y)表示当前激光图像的矫正坐标,src(i,j)表示当前激光图像的原始坐标,center表示当前激光图像的中心点,norm表示均值系数,scale表示放大系数,sq表示均差系数,qd表示标准差系数;
15、基于所述矫正坐标根据像素值公式计算对应的矫正像素值,根据所述矫正像素值重建图像,得到n个已矫正第一激光图像和n个已矫正第二激光图像:
16、new=(1-dx)*(1-dy)*p00+dx*(1-dy)*p10+(1-dx)*dy*p01+dx*dy*p11其中,new表示矫正像素值,dx表示矫正坐标的对应点与最近像素格点的水平距离比例,dy表示矫正坐标的对应点与最近像素格点的垂直距离比例,p00表示矫正坐标的对应点整数部分的左上方的像素值,p10表示矫正坐标的对应点整数部分的右上方的像素值,p01表示矫正坐标的对应点整数部分的左下方的像素值,p11表示矫正坐标的对应点整数部分的右下方的像素值;
17、对n个所述已矫正第一激光图像和n个所述已矫正第二激光图像分别进行图像融合。
18、根据上述描述可知,会对每一个第一激光图像和每一个第二激光图像进行矫正,消除镜头畸变提高图像质量,从而对已矫正第一激光图像和已矫正第二激光图像进行图像融合,提高图像融合准确性。
19、可选地,所述对n个所述已矫正第一激光图像和n个所述已矫正第二激光图像分别进行图像融合包括:
20、根据二值化公式对每一个所述已矫正第一激光图像和每一个所述已矫正第二激光图像进行二值化,得到n个第一激光二值化图像和n个第二激光二值化图像:
21、
22、其中,dst(x,y)表示当前激光图像的当前坐标结果像素值,src(x,y)表示当前激光图像的当前坐标原始像素值,th表示设定阈值;
23、遍历每一个所述第一激光二值化图像和每一个所述第二激光二值化图像统计各自的白色像素值,得到对应的第一白色面积和第二白色面积,根据过滤规则对所述第一白色面积和第二白色面积进行过滤,得到已过滤第一白色面积和已过滤第二白色面积;
24、分别对每一个所述已过滤第一白色面积和每一个所述已过滤第二白色面积通过最小二乘法进行拟合直线,得到对应的第一直线和第二直线:
25、y=ax+b
26、a=σ(d(x)*d(y))/σ(d(x)2)
27、b=mean(y)-a*mean(x)
28、d(x,y)=src(x,y)-mean(x,y)
29、mean(x,y)=(1/n)*σ(x,y)
30、其中,y表示直线的方程;
31、根据所述第一直线和所述第二直线得到第一特征区域和第二特征区域,根据所述第一特征区域对n个所述已矫正第一激光图像进行图像融合,根据所述第二特征区域对n个所述已矫正第二激光图像进行图像融合。
32、根据上述描述可知,将已矫正第一激光图像和已矫正第二激光图像进行二值化,消除图像噪声提高图像质量的同时,增强图像对比度,确保白色面积的准确性,且对得到的白色面积会进一步进行过滤,以已过滤白色面积进行拟合直线,提高特征区域的准确性,使得根据特征区域对已矫正激光图像进行图像融合的准确性得到保证。
33、可选地,所述根据所述第一直线和所述第二直线得到第一特征区域和第二特征区域包括:
34、计算所述第一直线两两相交的第一交点和第一交点对应的第一夹角,计算所述第二直线两两相交的第二交点和第二交点对应的第二夹角;
35、根据所述第一交点和第一夹角对第一直线进行筛选,根据所述第二交点和第二夹角对第二直线进行筛选,得到已筛选第一直线和已筛选第二直线,基于所述已筛选第一直线和已筛选第二直线分别得到第一特征区域和第二特征区域;
36、根据所述第一特征区域对n个所述已矫正第一激光图像进行图像融合,根据所述第二特征区域对n个所述已矫正第二激光图像进行图像融合。
37、根据上述描述可知,在根据直线得到特征区域时,会根据直线两两相交的交点和夹角对直线进行筛选,根据已筛选直线得到特征区域,从而提高特征区域的准确性。
38、可选地,所述根据所述第一特征区域对n个所述已矫正第一激光图像进行图像融合,根据所述第二特征区域对n个所述已矫正第二激光图像进行图像融合包括:
39、根据所述第一特征区域和所述第二特征区域遍历对应的每一个所述已矫正第一激光图像的像素值和每一个所述已矫正第二激光图像的像素值,将其输入融合系数公式分别计算出每一个所述已矫正第一激光图像中每一个坐标对应的第一融合系数和每一个所述已矫正第二激光图像中每一个坐标对应的第二融合系数:
40、
41、
42、其中,d(x,y)表示当前坐标对应的融合系数,w1,w2,…,wn表示当前已矫正激光图像的权重,p1,p2,…,pn表示当前已矫正激光图像当前坐标像素值,(x,y)表示当前坐标,d表示特征区域;
43、根据所述第一融合系数对n个所述已矫正第一激光图像进行图像融合,根据所述第二融合系数对n个所述已矫正第二激光图像进行图像融合。
44、根据上述描述可知,在进行图像融合时会根据特征区域计算已矫正激光图像中每一个坐标对应的融合系数,从而根据对应的融合系数进行图像融合,提高图像融合的准确性。
45、可选地,所述计算所述已融合第一激光图像的第一激光中心点和所述已融合第二激光图像的第二激光中心点包括:
46、所述计算所述已融合第一激光图像的第一激光中心点和所述已融合第二激光图像的第二激光中心点包括:
47、对所述已融合第一激光图像和所述已融合第二激光图像分别进行横向扫描和纵向扫描,得到第一横向一维数组、第一纵向一维数据,第二横向一维数组和第二纵向一维数组;
48、根据横向分离公式计算所述第一横向一维数组和第二横向一维数组对应的第一横向分离阈值和第二横向分离阈值:
49、thh=(dh1+dh2+…+dhm)/m
50、其中,thh表示当前横向分离阈值,dh1…dhm表示当前横向一维数组的数组值,m表示当前已融合激光图像的宽度;
51、根据纵向分离公式计算所述第一纵向一维数组和第二纵向一维数组对应的第一纵向分离阈值和第二纵向分离阈值:
52、thv=(dv1+dv2+…+dvn)/n
53、其中,thv表示当前纵向分离阈值,dv1…dvn表示当前纵向一维数组的数组值,n表示当前已融合激光图像的高度;
54、基于所述第一横向分离阈值和所述第一纵向分离阈值分别对所述第一横向一维数组和所述第一纵向一维数组进行分割,基于所述第二横向分离阈值和所述第二纵向分离阈值分别对所述第二横向一维数组和所述第二纵向一维数组进行分割,得到已分割第一横向数组集合、已分割第一纵向数组集合、已分割第二横向数组集合和已分割第二纵向数组集合;
55、对所述已分割第一横向数组集合中的每一个子集和所述已分割第一纵向数组集合中的每一个子集进行抛物线拟合,得到对应的第一抛物线参数,对所述已分割第二横向数组集合中的每一个子集和所述已分割第二纵向数组集合中的每一个子集进行抛物线拟合,得到对应的第二抛物线参数:
56、y=ax2+bx+c
57、
58、
59、
60、其中,y为抛物线的方程,n表示当前已分割横向/纵向数组集合中的子集的长度,xi,yi表示当前已分割横向/纵向数组集合中的子集的横坐标和纵坐标,其中i=0,1,…,n;
61、根据所述第一抛物线参数计算对应的第一抛物线顶点,根据所述第二抛物线参数计算对应的第二抛物线顶点,根据所述第一抛物线顶点和所述第二抛物线顶点得到对应的第一激光中心点和第二激光中心点。
62、可选地,所述基于所述第一横向分离阈值和所述第一纵向分离阈值分别对所述第一横向一维数组和所述第一纵向一维数组进行分割,基于所述第二横向分离阈值和所述第二纵向分离阈值分别对所述第二横向一维数组和所述第二纵向一维数组进行分割包括:
63、从所述第一横向一维数组的第一个位置的数组值开始进行遍历,当所述数组值大于第一横向分离阈值时,记录该数组值的下标作为第一横向分割起点,继续循环直到数组值小于第一横向分离阈值,记录该数组值的下标作为第一横向分割终点,根据所述第一横向分割起点和第一横向分割终点进行分割得到已分割第一横向数组子集,如此循环得到所有已分割第一横向数组子集;
64、从所述第一纵向一维数组的第一个位置的数组值开始进行遍历,当所述数组值大于第一纵向分离阈值时,记录该数组值的下标作为第一纵向分割起点,继续循环直到数组值小于第一纵向分离阈值,记录该数组值的下标作为第一纵向分割终点,根据所述第一纵向分割起点和第一纵向分割终点进行分割得到已分割第一纵向数组子集,如此循环得到所有已分割第一纵向数组子集;
65、从所述第二横向一维数组的第一个位置的数组值开始进行遍历,当所述数组值大于第二横向分离阈值时,记录该数组值的下标作为第二横向分割起点,继续循环直到数组值小于第二横向分离阈值,记录该数组值的下标作为第二横向分割终点,根据所述第二横向分割起点和第二横向分割终点进行分割得到已分割第二横向数组子集,如此循环得到所有已分割第二横向数组子集;
66、从所述第二纵向一维数组的第一个位置的数组值开始进行遍历,当所述数组值大于第二纵向分离阈值时,记录该数组值的下标作为第二纵向分割起点,继续循环直到数组值小于第二纵向分离阈值,记录该数组值的下标作为第二纵向分割终点,根据所述第二纵向分割起点和第二纵向分割终点进行分割得到已分割第二纵向数组子集,如此循环得到所有已分割第二纵向数组子集。
67、根据上述描述可知,通过对已融合激光图像进行横向和纵向扫描得到对应的横向一维数组和纵向一维数组并根据对应的横向分离阈值和纵向分离阈值对其进行分割,在分割时是从数组的第一个位置开始遍历如此循环,保证已分割横向数组集合和已分割纵向数组集合的准确性和全面性,且对每一个数组集合中的每一个子集都进行抛物线拟合求出抛物线顶点,保证激光中心点的全面性和准确性。
68、可选地,所述基于所述第一激光中心点和第二激光中心点计算标定数据包括:
69、获取所述第一激光中心点的第一坐标集合、第二激光中心点的第二坐标集合、已知层高石材的层高和第一台面的边角物理坐标集合,计算矫正系数:
70、
71、其中,x1,y1表示第一坐标集合的坐标,x2,y2表示第一坐标集合的坐标,xw,yw表示边角物理坐标集合的坐标,r1,r2,r3,r4,t1,t2表示矫正系数;
72、基于所述矫正系数计算标定数据。
73、根据上述描述可知,在计算标定数据时,会将已知层高的石材层高考虑其中进行计算,提高标定数据的准确性。
74、可选地,所述n取整数4。
75、根据上述描述可知,将十字点位设为4个,使得得到的第一激光图像和第二激光图像均有4个,从而避免所计算出的标定数据过于片面,提高标定数据的准确性。
76、第二方面,提供一种桥切视觉标定的装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现第一方面所述的一种桥切视觉标定的方法。
77、其中,第二方面所提供的一种桥切视觉标定的装置,所对应的技术效果参照第一方面所提供的一种桥切视觉标定的方法的相关描述。
- 还没有人留言评论。精彩留言会获得点赞!