一种大尺度空间试训任务场景快速生成系统
本发明涉及试训任务场景生成领域,特别涉及一种大尺度空间试训任务场景快速生成系统。
背景技术:
1、当前,军事训练面临着作战模式新颖独特、作战对象动态变化、作战条件复杂多元等实装训练难题,考虑到和平环境下最具作战真实性的军事行动是演习训练,如果结合演习训练开展作战试验,不仅能满足“实战化”需求,还将大幅降低训练成本确保训练安全的同时不干扰实装系统。
2、随着信息化建设在试验训练领域的持续发展,军事训练向实战化深入迈进,体现在试验对象向装备体系拓展、试验环境向复杂环境转变、试验模式向一体化联合转变等。通过模拟仿真构建紧贴实战的试训系统,支撑部队开展岗位操作训练、体系对抗训练等活动,既便于灵活布设训练场景、丰富训练内容,也能有效提高训练效果。
3、试训系统的任务场景构建不仅要符合空间试训手段多样、系统复杂、要素繁多等特点,也需要通过灵活设置训练场景参数,构建不同训练场景内容,满足岗位操作训练、战术战法研究等要求。在试训场景构建过程中,除了快速构建航天器结构和设计任务轨道,更重要的是无时无刻对航天器的轨道设计与控制、设备安全、任务规划等方面有重要影响的空间环境。空间环境如磁场、辐射带、太阳风等对航天器通信、能源、结构、电子设备、载荷性能等均可能有不同程度的影响和毁伤。
4、目前,试训系统很少考虑空间环境等因素的引入和影响,即使有涉及,也是从前端显示的角度引入某一类环境因素,远远达不到紧贴实际的环境仿真要求。同时,对任务场景如任务轨道、航天器结构的构建都是采用参数化形式通过模板匹配或者用户输入方式进行,这种方式既不直观简便也不能满足快速构建的需求。
5、综上所述,在面向复杂环境、体系对抗的试训系统中,快速构建大尺度、灵活、真实的试训任务场景是开展训练任务的基础和核心,也是一个巨大的挑战。
技术实现思路
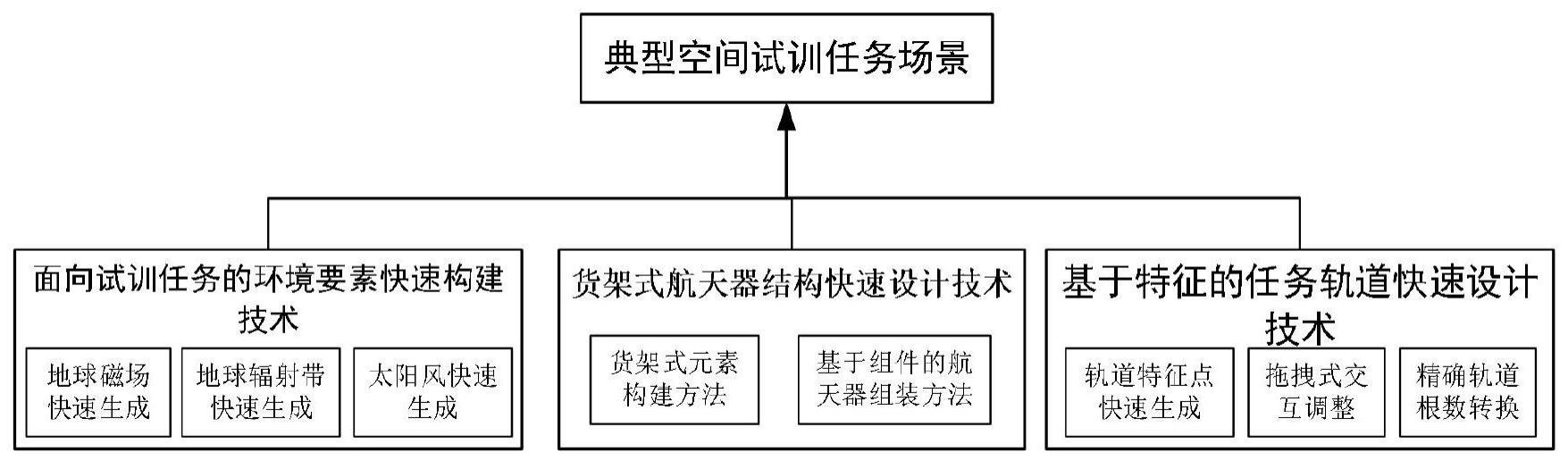
1、本发明的目的在于解决围绕在空间试训领域中针对快速生成大尺度真实试训任务场景难的问题。本发明突破了面向试训任务的环境要素快速构建、货架式航天器结构快速设计、基于特征的任务轨道快速设计等关键技术,实现了大尺度空间下真实灵活的试训任务场景构建,为训练仿真下演习演训、战术战法研究提供技术支撑。
2、本发明的主要目的具体包括:
3、1、极大的增强航天器结构、轨道设计灵活性,进而拓展训练场景下兵力布设的自由度,有效提高场景构设和训练效率。
4、2、推动融合空间环境影响的试训体系的发展,使试训系统朝着更加紧贴实际的方向发展。
5、为达到上述目的,本发明通过下述技术方案实现。
6、本发明提出了一种大尺度空间试训任务场景快速生成系统,所述系统包括:
7、任务训练环境生成模块,用于通过空间环境数据或计算模式生成任务训练环境;
8、航天器生成模块,用于构建货架式元素,并基于货架式元素采用人机交互方式组合生成不同航天器;
9、任务轨道生成模块,用于采用图形化交互式方式生成任务轨道;和
10、试训任务场景生成模块,用于将任务训练环境、航天器和任务轨道融合形成试训任务场景。
11、作为上述技术方案的改进之一,所述任务训练环境生成模块中,生成任务训练环境包括:生成地球磁场、生成地球辐射带和生成太阳风;其中,地球磁场包括内源场和外源场;
12、所述生成地球磁场,包括:采用地球物理学中的国际标准“国际参考地磁场”计算内源场,采用t96磁层磁场模式计算外源场;并采用磁力线对地球磁场进行表征;
13、所述生成地球辐射带,包括:采用电子ae8和质子ap8模式计算地球辐射带,并采用最外层融合截面的方式进行,通过对辐射带中给出不同能量的质子、电子在空间的全向积分通量的分布情况进行可视化表示对地球辐射带进行表征;
14、所述生成太阳风,包括:根据现有观测数据在1au空间范围内,仿真太阳风的等离子体的密度、温度、速度和磁场在空间的分布情况,其中,密度和温度均只要一个数据项描述;速度和磁场强度均需要由3个坐标轴方向上的分量确定;并通过一个数据项基于颜色表转化为颜色对密度或温度进行表征,采用与地球磁场快速生成方法中磁力线生成方式,通过在太阳风数据中插值生成速度和磁场强度的表征效果。
15、作为上述技术方案的改进之一,所述内源场的北向分量x、东向分量y和垂直向下的分量z的计算式分别为:
16、
17、其中,(r,θ,λ)是地心坐标,r是地心距,θ是地理余纬;λ是地理经度,a是地球半径,和是t时刻一定阶数n的高斯系数,是n阶m次施密特拟规格化legendre函数;
18、所述t96磁层磁场模式为利用太阳风压力、dst指数、行星际磁场以及地磁倾角来计算空间某点的外部磁场;
19、所述采用磁力线对地球磁场进行表征,具体包括:确定磁力线的初始位置点p1,依据该点的磁场强度,在其磁场方向上以小步长t前进至p2,在p2点重复上述过程,直至到达数据场的边界或其它终止条件;其中任意点p的磁场强度依据其所处位置采用国际参考地磁场或t96磁层磁场模式计算得到;
20、仿真太阳风的等离子体的密度、温度、速度和磁场在空间的分布情况时,在极坐标空间对空间太阳风数据进行采样,具体包括:
21、用x轴、y轴和z轴标识太阳黄道坐标系的参考坐标轴,由三元式确定每一个采样点空间位置,r’是采样点到太阳日心的距离,θ’是采样点与日心连线在黄道面内的投影与日心黄道坐标系的x轴的夹角,是采样点与日心的连线与日心黄道坐标系z轴的夹角;每一采样点的属性域包含:背景场密度、背景场温度、及某仿真时刻的粒子密度、温度、磁场强度和径向速度;采样时,距日心越近,单位距离上的数据采样频率越高。
22、作为上述技术方案的改进之一,所述航天器生成模块中,构建货架式元素包括:总结和归纳各航天器平台和载荷的三维特点,提取典型部件的三维结构进行数字化,定义几何模型,建立模型模板和组件并提供相应构建方法和组件库;其中,
23、定义几何模型时,包括定义几何模型的几何拓扑特征、形状特征、工作特征、材料特征和质量特征;定义工作特征时,至少对部件进行覆盖分析、遮挡分析和通信分析;定义工作特征时,至少对部件进行渲染分析、力学分析和热分析。
24、作为上述技术方案的改进之一,所述航天器生成模块中,基于货架式元素采用人机交互方式组合生成不同航天器时,采用从下而上的结构设计模式,先进行组件的三维设计,然后把组件逐级装配起来,完成整个航天器结构的装配,具体包括:
25、a)建立空白设计场景;
26、b)选择航天器平台类型,调整航天器平台各个部分的大小尺寸;
27、c)选择航天器内部载荷组件,并调整参数,包括大小和重量;
28、d)安装平台内部载荷并检测,包括碰撞和吸附,同时设置载荷的安装姿态,确定载荷视场大小及指向;
29、e)安装平台外部载荷,调整特征参数,包括大小、重量和材质,设置探测视场大小及指向,选择转台类型,安装并设置运动方式;
30、f)选择通信天线类型、安装方式以及安装位置;
31、g)选择太阳帆板类型,设置安装位置和展开方式;
32、h)完成航天器结构设计。
33、作为上述技术方案的改进之一,所述任务轨道生成模块包括:空间生成单元、天体生成单元、轨道计算和调整单元,其中,
34、所述空间生成单元,用于建立三维立体虚拟空间,并建立参考坐标系;
35、所述天体生成单元,用于在三维立体虚拟空间中建立太阳系中的天体,包括天体的位置、速度和自转,并对天体进行经纬度划分;
36、所述轨道计算和调整单元,用于通过轨道特征点在三维立体虚拟空间建立、调整和生成任务轨道。
37、作为上述技术方案的改进之一,所述轨道计算和调整单元中,通过轨道特征点在三维立体虚拟空间建立、调整和生成任务轨道,包括:
38、以在屏幕上直接绘制、从系统后台数据库中点选或参数输入的方式,建立一个缺省的轨道作为操作对象,其中在屏幕上直接绘制建立缺省轨道时,利用轨道特征点与中心天体、虚拟三维空间的相对关系,提取轨道根数计算所需要的输入信息,完成快速轨道根数的计算;
39、在缺省轨道建立后,通过调整轨道上一系列反映当前轨道度量信息的轨道特征点改变轨道的形状和方位,直到轨道可以覆盖用户所需要完成的任务目标完成轨道的调整,生成任务轨道。
40、作为上述技术方案的改进之一,完成快速轨道根数的计算的过程中,当轨道为椭圆轨道时,计算的轨道根数包括:半长轴a、偏心率e、轨道倾角i、近地点辐角ω、升交点赤经ω和真近点角f,计算式分别为:
41、
42、其中,ra,rp分别表示目标轨道的远、近地点半径:ra=db,rp=da;dj表示参考点j到中心点的距离;(xj,yj,zj)表示参考点j的坐标pj;
43、
44、
45、式中,||h||表示轨道法向矢量h的模;
46、h=(hx hy hz)t=pa×pc=pc×pb=pb×pd=pd×pa,(hx hy hz)表示轨道法线矢量;
47、
48、式中,o为坐标中心,pa(xa,ya,za=0)为升交点,||opa||表示升交点与坐标中心连线的矢量的模;;
49、
50、式中,||·||表示矢量的模;
51、真近点角f通过用户拖拽卫星在轨道上的位置来确定。
52、作为上述技术方案的改进之一,轨道计算和调整单元中,通过轨道特征点在三维立体虚拟空间建立、调整和生成任务轨道,还包括:在完成快速轨道根数计算后,将轨道根数转化到笛卡儿坐标系下的轨道参数,然后利用笛卡尔坐标下的轨道参数进行递推计算,得到更精确的轨道。
53、作为上述技术方案的改进之一,所述将轨道根数转化到笛卡儿坐标系下的轨道参数,包括:
54、f)计算当前地心距r:
55、
56、g)计算当前卫星的幅角u:
57、u=ω+f
58、h)计算当前卫星的位置的三分量x,y,z:
59、
60、其中,s点为卫星在天球上的投影,r为地心距,i为轨道倾角,u为当前卫星的幅角,ω为升交点赤经;
61、i)计算当前卫星速率v:
62、
63、其中,μ为地球引力常数;
64、j)计算速度的分量
65、
66、其中,s′点表示卫星速度方向在轨道平面内的指向点,˙表示一次求导;s′和s之间的夹角满足:
67、
68、f在第i、ii象限时,在第i象限;f在第iii、iv象限时,在第ii象限。
69、利用笛卡尔坐标下的轨道参数进行递推计算时,递推公式为:
70、
71、式中,x,y,z为卫星坐标,¨表示二次求导;为卫星到地心的距离。
72、本发明与现有技术相比优点在于:
73、1、本发明系统实现了面向试训任务的空间环境典型要素快速生成;针对试训任务中空间环境对航天器影响问题,提出了体现环境要素的分布规律、数据内涵和变化特征的典型要素快速生成方法,通过环境要素模式快速计算全空间环境取值,符合试训任务对全时全空间取值而不必无时无刻与客观世界一致的需求,基本满足紧贴实战的要求,具有很高的应用价值;
74、2、本发明系统实现了试训场景下兵力结构和轨道的快速生成;针对空间试训任务复杂、场景创建与更改频繁,而组训人员往往非结构或轨道的专业人员,使用专业工具难的问题,提出了航天器结构和轨道的快速生成方法,通过货架式组装或拖拽式特征轨道修改,颠覆了以往空间试训领域常规的设计方式,是一项具有一定原创新的应用研究工作,极大的提高了领域人员的使用效率。
- 还没有人留言评论。精彩留言会获得点赞!